


1、简单易用,可快速上手
2、流畅支持300个器件或1000个焊盘以下的设计规模
3、支持简单的电路仿真
4、面向学生、老师、创客

1、全新的交互和界面
2、流畅支持超过3w器件或10w焊盘的设计规模,支持面板和外壳设计
3、更严谨的设计约束,更规范的流程
4、面向企业、更专业的用户
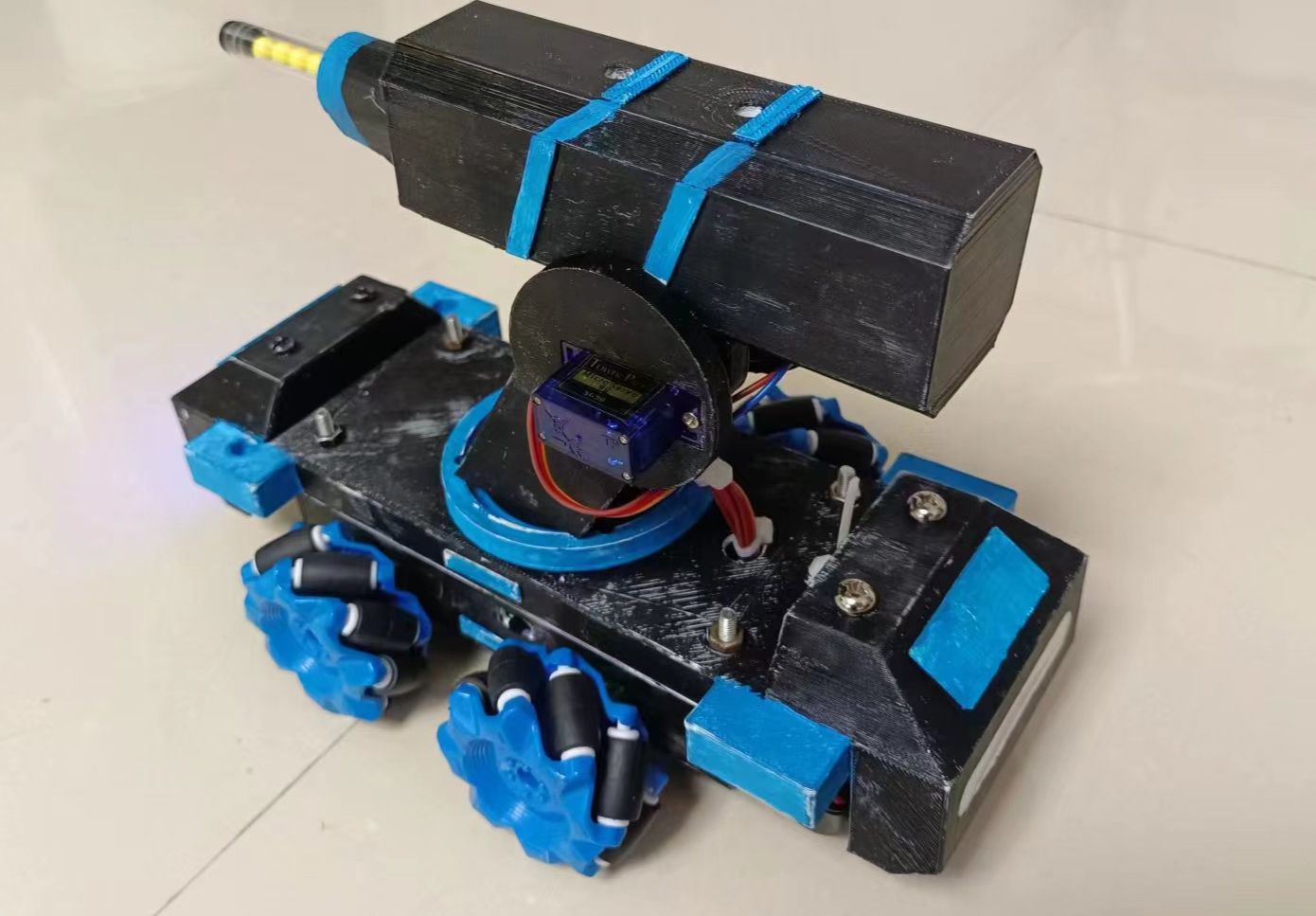
专业版 基于立创·梁山派的麦轮小坦克
简介:基于梁山派开发设计麦轮小坦克。可以实现PS手柄摇控,舵机炮台,炮台发射,麦轮驱动,保留摄像头,蓝牙等接口。
开源协议: GPL 3.0
通过本项目可以学习单片机编程和电路设计并运用实践,制作出属于自己的“小车车”
功能介绍:
1.实现四轮麦轮小车行走与差速转弯和原地转圈的功能
采用N20电机,A4950电机驱动与马克纳姆轮


使用A4950电机驱动,性能比DRV8733与TB6612更强,有两路PWM控制

电机驱动电路
麦克纳姆轮的控制
1、前进/后退

以上述方式安装的麦轮同时正转时,前部两个轮与后方两个轮的侧方的力都可以抵消,只剩下向前方的力。小车就可以向前运动
图为,向前时横向移动的力
后退反转即可,分析同理
2.左右平移
原理是将小车同一侧的两个麦轮以相反的方向旋转,这样沿前后方的力就会抵消,而横向的力有恰好是同一方向。

例如向左移动就所有右轮全反转,左轮全正转。
3.自旋
原理就是一侧的轮子向后,另一侧的轮子向前;这样对于同一侧的两个轮子来说,横向的力还是可以抵消

如左侧两个轮子正转,右侧两个轮子反转就可以使小车顺势针旋转,反之则逆时针
以上这几种运动方式需要注意的是,四个轮子虽然转的方向不同,但是转速需要严格相同,不然运动就不再准确。
但是当我们需要向其他任意方向平动的话,可以将小车速度分解为xy两轴上的方向,分别将这两个分速度的值计算出四个轮子的转速,再将这两套轮子的转度叠加,就可以还原回最开始要求的特殊的小车合速度。
这样四个轮子的转速就不再相同,小车的运动也就不再限于前后与左右,而是你需要的任何方向。
2.炮台转动与发射
2.1炮台转动通过2个SG90舵机,完成炮台的左右和上下的方向移动。通过梁山派的PA5、PB8口的PWM信号控制

舵机电路

2.2炮台发射
炮台发射部分由单波箱完成

由梁山派控制高低电平输出控制三极管的通断,来实现对发射的控制

炮台发射控制电路
3.PS手柄控制
PS手柄接收机图


手柄接收器电路图
三、技能掌握:
-
硬件设计能力
- 学习嵌入式项目电路分析的能力,学会如何看懂原理图;
- 初步学习掌握元器件选型与数据手册阅读的基础能力;
- 学会智能小车工作原理与嵌入式电路设计的基本方法;
- 学习原理图设计、PCB设计能力,培养独立项目设计思维;
- 掌握元器件焊接与硬件调试技能,成为新一代“焊武帝”;
软件开发能力
- 了解GD32基础功能及外设的使用,上手GD32项目开发;
- 了解ADC采集原理,实现电压的采集功能;
- 了解PWM原理,实现PWM控制不同占空比的输出;
- 了解PS手柄通信方式,实现整车的控制
- 掌握嵌入式软件开发、代码的阅读与BUG调试的方法与技巧;
四、碰到的问题与解决方法
- 一开始烧录不进去,后来看了官方教程学习ISP后解决
- 借此机会顺便给大家科普一下ISP升级原理,其实芯片在运行用户程序之前会先运行一段厂家程序,复位是为了让程序从头开始执行厂家程序,在厂家程序里面会去检测boot按键是否被按下,如果按下就进入到升级模式,所以这里复位松开以后boot按键还是需要保留到厂家程序检测结束后再松开
五、演示视频:


 4
4
 17
17
加载中...
是否需要添加此工程到专辑?

