


1、简单易用,可快速上手
2、流畅支持300个器件或1000个焊盘以下的设计规模
3、支持简单的电路仿真
4、面向学生、老师、创客

1、全新的交互和界面
2、流畅支持超过3w器件或10w焊盘的设计规模,支持面板和外壳设计
3、更严谨的设计约束,更规范的流程
4、面向企业、更专业的用户

专业版 基于梁山派自平衡O型独轮车
简介:本项目中的独轮车模采用十八届智能车赛题提供的O车模,以嘉立创梁山派为主控板进行设计,可以完成十八届智能车比赛中的任务
开源协议: GPL 3.0
(未经作者授权,禁止转载)
已参加:星火计划2023
项目说明
本项目中的独轮车模采用十八届智能车赛题提供的O车模,以嘉立创梁山派为主控板进行设计,可以完成十八届智能车比赛中的任务(代码在附件内)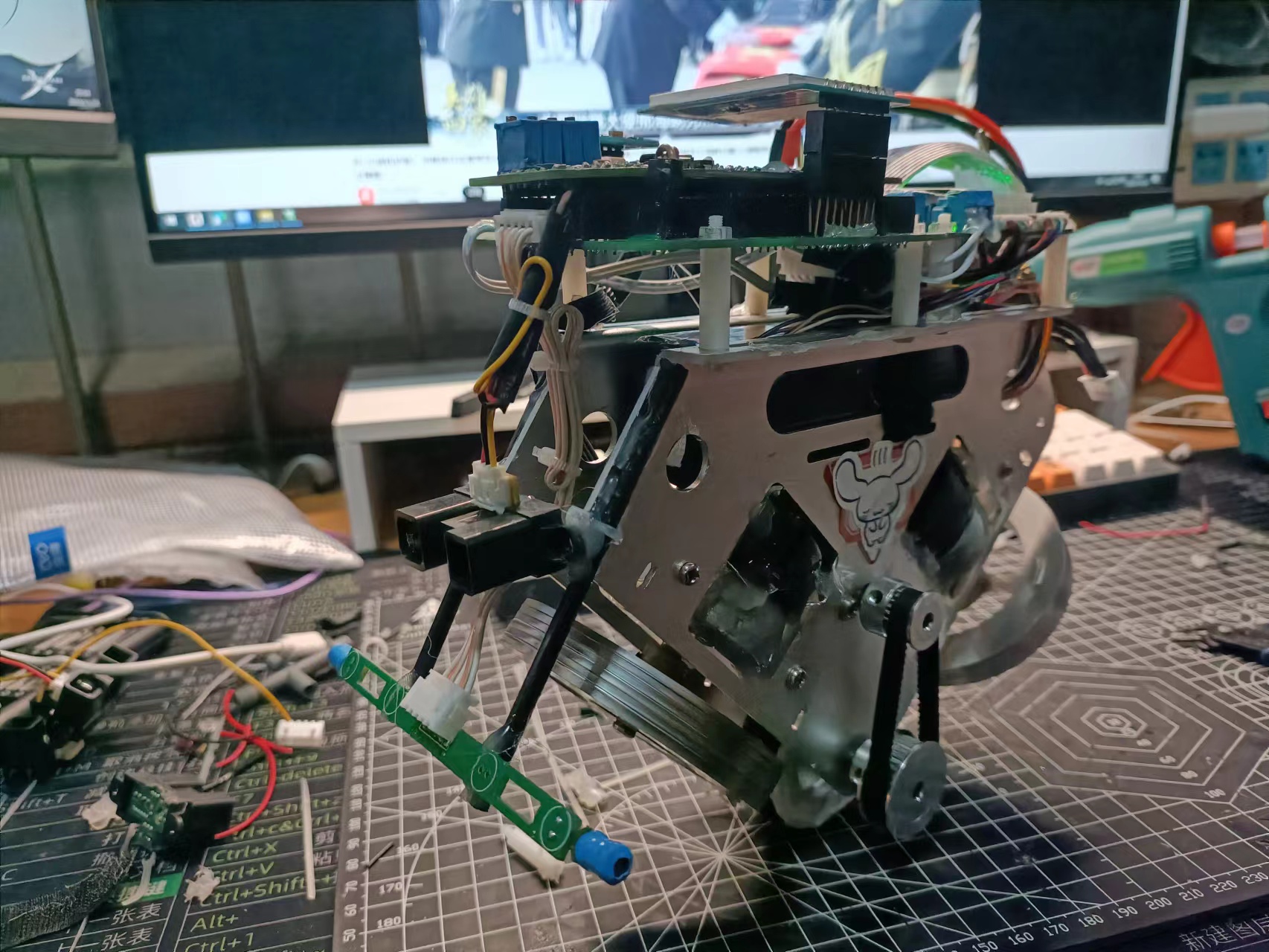
开源协议
开源协议说明
GPL3.0
项目相关功能
1. 独轮车结构,采用一个底轮电机跟两个动量轮无刷电机控制。电池使用了6s电池
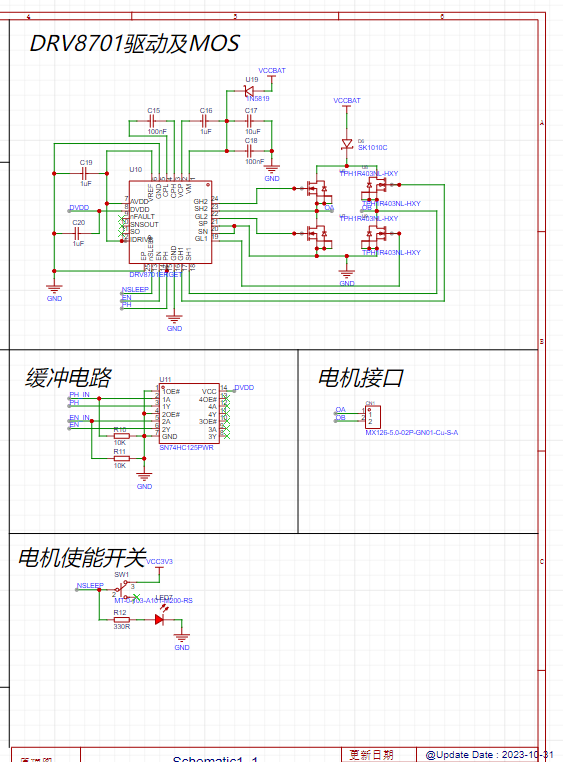
2. 采用DRV8701作为底轮有刷电机驱动,可通过PWM控制电机的正反转以及调速。无刷电机自带驱动,不需要额外驱动
3. 可以通过感应电磁信号来进行循迹,方式与大学生智能汽车竞赛类似
4. 主控扩展版上预留蓝牙接口,方便与手机通信,扩展DAPlink接口,方便下载插拔。
5.电源板上有防反接电路,一个5V电源及两个3.3V电源,一个drv8701全桥电机驱动
5. 为了使用安全,电源部分与核心板部分进行了隔离
提示:此处说明整个项目的整体功能
项目属性
本项目为首次公开,为本人原创项目。项目在十八届智能车竞赛中获得山东省二等奖
本项目为首次公开,为本人原创项目。项目未曾在别的比赛中获奖。
项目进度
项目的整体进度,申请项目耗材费用9必填!
2023-8-8 项目中标,开始设计方案
2023-8-25软件方案设计完成
2023-9-28硬件方案第一版设计完成
2023-10-5第一版硬件收到测试
2023-10-15第二版硬件设计完成
2023-10-18第二版硬件收到测试
2023-10-25硬件测试完成开始调试
2023-11-14完成基本任务录制视频
2023-11-20第一次寄出测试验收并整改
2023-12-22第二次寄出测试验收并整改
2024-1-15第二次寄出测试验收并整改
设计原理
提示:该项目的设计原理说明
车模介绍
1.1.1车模主体
车长215mm,高356mm,最宽处116mm,全车采用氧化合金制作,双飞轮结构可平衡站立也可自由转向
1.1.2无刷电机
官方配备Nidec O-1104直流无刷电机(DC24V,转速6000r)用来控制动量轮的旋转。电机内置无刷驱动型,带100线双通道编码器,适合高精度反馈控制,电机支持PWM信号调速和正反转,带急停功能,支持正反转切换和无极调速。 购买链接(买整车是送电机的,这个不需要单独购买,更换配件可以考虑): https://item.taobao.com/item.htm?abbucket=18&id=716033359390&ns=1&spm=a21n57.1.0.0.76f5523cDrhemB&skuId=5000259636337
1.1.3直流有刷电机
DC7.2V,转速800r,是车模完成竞赛任务的有力保障。
购买链接:https://item.taobao.com/item.htm?abbucket=18&id=693298985042&ns=1&spm=a21n57.1.0.0.76f5523cDrhemB
1.1.4独轮车车轮
直径54mm,轮宽16mm,轮毂为氧化合金,外部环保TPR材料制作,带花纹,摩擦力大,坚固耐撞。
其他配件请见附件表格
控制原理:
独轮车控制算法大体可分为平衡控制和循迹控制两部分,其整体抗干扰性与响应速度是衡量独轮车整体性能的重要指标。
平衡部分:
独轮车的前后平衡通过底轮控制,算法采用三环串级PID,对其前后倾角进行控制,使其前后整体保持稳定。
独轮车的左右平衡通过前后动量轮控制,算法同样采用三环串级PID,对其左右倾角进行控制,使其左右整体保持稳定。
其中,独轮车平衡控制依靠动量轮来实现,使用串级 PID 进行控制, 则需要将三个PID控制器进行串联,分别是角速度环、角度环和速度环,根据响应时间的快慢,将角速度环作为最内环,其次是角度环,速度环作为最外环,与直立车、平衡单车类似。
串级 PID 的代码实现比较简单,思路也比较容易实现,就是将三个普通的PID 进行相应的串联,配合不同的控制周期实现串级 PID,只不过每一个环节的PID 的误差输入的物理量都不一样,同时内环 PID 的输入要联系前一个环节 PID的输出。
循迹部分:
电磁采集电路是为了智能车在断路时能继续行驶所必要的传感器;电磁采集电路是由选频、放大、检波组成给单片机提供一个稳定的通过中间的通电的漆包线感应出来的电压来判断车模的位置状态。通过卓老师的信号与解调推文学习与信号有关的知识并根据竞赛组委会发布的的电磁车指南中选用运放检波电路作为电磁采集的电路。这种电路可以同时完成信号的放大与检波,输出的阻抗小。
对于直导线,当装有小车的中轴线对称的两个线圈的小车沿其直线行驶,即两个线圈的位置关于导线对称时,则两个线圈中感应出来的电动势大小应相同且方向亦相同。若小车偏离直导线,即两个线圈关于导线不对称时,则通过两个线圈的磁通量是不一样的。这时,距离导线较近的线圈中感应出的电动势应大于距离导线较远的那个线圈中的。根据这两个不对称的信号的差值,即可调整小车的方向,引导其沿直线行驶。
对于弧形导线,即路径的转弯处,由于弧线两侧的磁力线密度不同,则当载有线圈的小车行驶至此处时,两边的线圈感应出的电动势是不同的。具体的情况是,弧线内侧线圈的感应电动势大于弧线外侧线圈的,据此信号可以引导小车拐弯。
另外,当小车驶离导线偏远致使两个线圈处于导线的一侧时,两个线圈中感应电动势也是不平衡的。距离导线较近的线圈中感应出的电动势大于距离导线较远的线圈。由此,可以引导小车重新回到导线上。
先将采集到的电磁信号滤波,采用卡尔曼滤波后将数据进行归一化,将归一化后的值限幅在正负100,与摄像头最后拟合的中线误差类似,通过归一化后得到的值进行pid运算。
电磁采集电路在智能车中是一种必要的传感器。该电路由选频、放大和检波组成,旨在为单片机提供一个稳定的电压信号,通过中间的通电漆包线感应出来,从而判断车模的位置状态。参考卓老师的信号与解调推文以及竞赛组委会发布的电磁车指南,选择了运放检波电路作为电磁采集的电路。这种电路能够同时完成信号的放大和检波,输出的阻抗较小。
对于直导线,当装有小车的中轴线对称的两个线圈的小车沿着直线行驶时,即两个线圈的位置关于导线对称时,两个线圈中感应出的电动势大小应相同且方向相同。若小车偏离直导线,即两个线圈关于导线不对称时,则通过两个线圈的感应电动势的差值,可以调整小车的方向,引导其沿直线行驶。
对于弧形导线,即路径的转弯处,由于弧线两侧的磁力线密度不同,当载有线圈的小车行驶至此处时,两边的线圈感应出的电动势是不同的。具体而言,弧线内侧线圈的感应电动势大于弧线外侧线圈的,据此信号可以引导小车拐弯。
此外,当小车驶离导线远离导线的一侧时,两个线圈中感应电动势也是不平衡的,距离导线较近的线圈中感应出的电动势大于距离导线较远的线圈。通过这一信号,可以引导小车重新回到导线上。
在采集到的电磁信号上,首先进行滤波操作,然后采用卡尔曼滤波对数据进行归一化。通过归一化后得到的数值进行PID运算,实现对小车的稳定行驶和导线跟随。
软件说明
提示:软件可以使用代码块来进行嵌套放置,无需全部软件部分说明,只需说明重要部分即可
调节经验:
我们针对独轮车的调试做了一些一些总结和注释:
对于串级 PID 的参数调节,需要遵循相应的原则, 首先要从内环开始往外环调节, 依次是角速度环、角度环和速度环。
角速度环的调整是希望当车模朝一个方向发生倾倒时, 控制动量轮的旋转产生一定的阻尼, 抑制小车的角速度。
角度环的调整是希望小车根据角度的偏移而固定输出一个转速,抑制小车
角度的倾斜。
速度环的调整是希望速度环是加快速度的增加,这样可以让电机输出更大
的力矩以更快的达到平衡。
1. 直立环(Pitch Control):
角速度环调节: 初始时,可以设置一个随意的P值,然后左右晃动小车。如果感觉到阻尼效果,说明方向正确;如果不是阻尼而是加速,说明我们方向错了,需要反转方向。
角度环调节:给一个较大的P值,然后让小车稍微倾斜。如果感觉到阻尼效果,说明方向正确,反之,同上。
3. 速度环:
在角度环和角速度环基本调整好的基础上,对速度环进行微调。
调整速度环的参数可能会对其他环有较大影响,需要谨慎调整。
对于速度环,我们希望速度环不是抑制速度的增加,而是让速度更快,这样就可以让动量轮输出更多的角动量以达到平衡
4.底轮跟转向同理
5. 注意事项:
- 初始调节时,进行粗调而非精细调节,因为无法得到实际效果的反馈。
- 内环调节时,注意参数不宜过大或过小,最好在左右晃动小车时感受到一定的阻尼。
- 参数调整时,避免一个环节完美了再调下一个,而是全部流程走完再进行优化。
实物展示
提示:作品的实物图片,图片可以加上说明。
一. 电源板部分
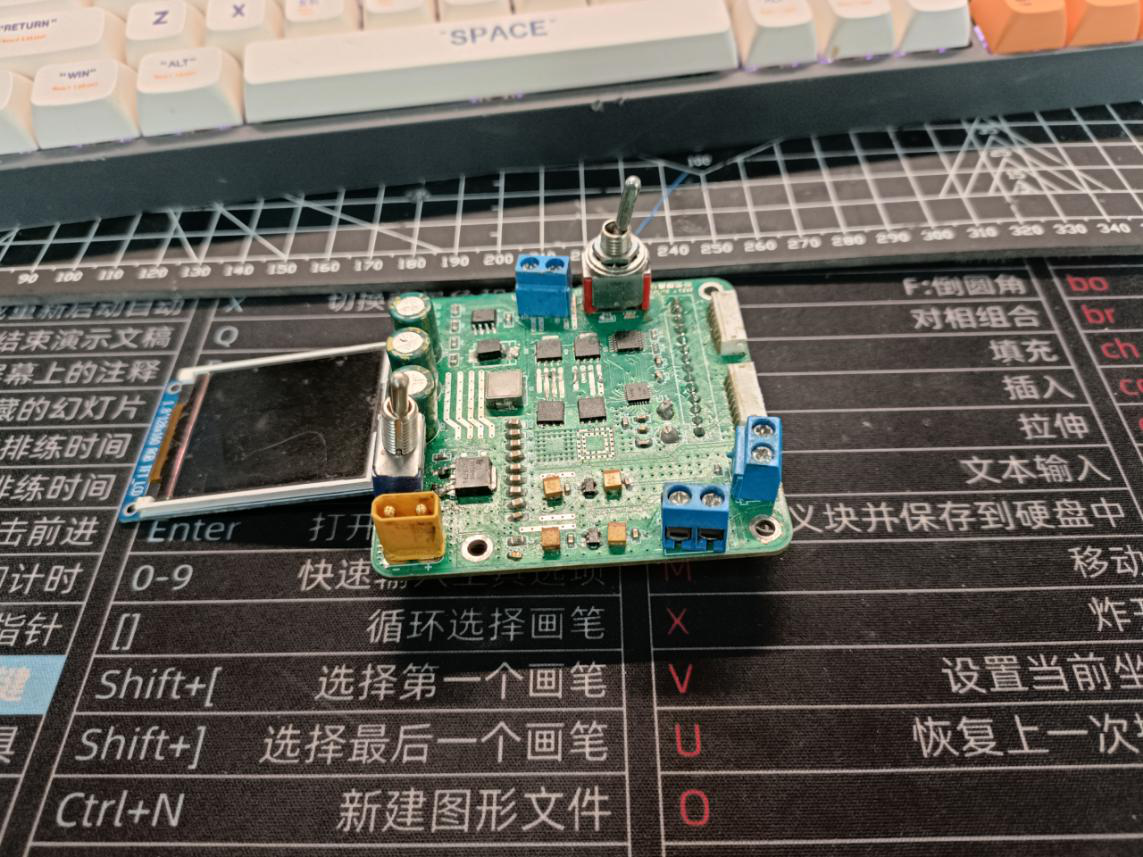
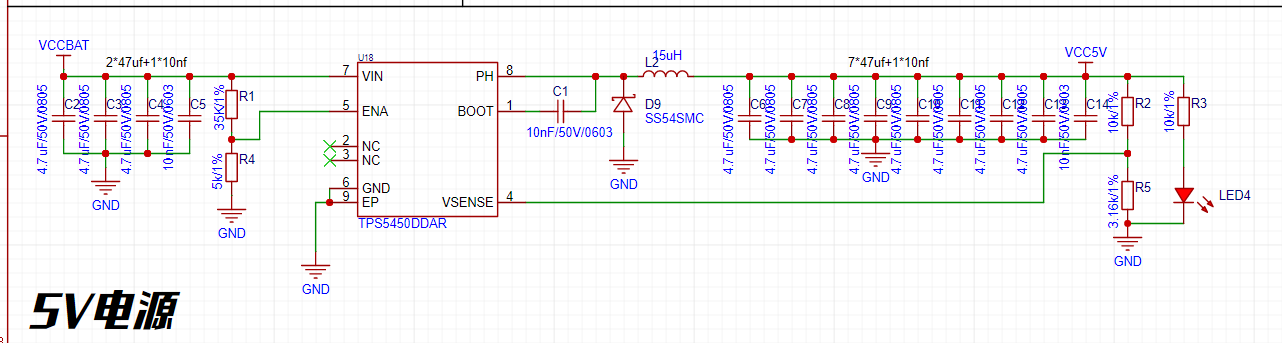
1.系统稳压电路采用DC-DC降压电路, 输入电压范围6V至28V工作输入范围(本项目采用6S电池供电),最大输出电流5A,本项目中输出电压为5V,用来给全系统供电
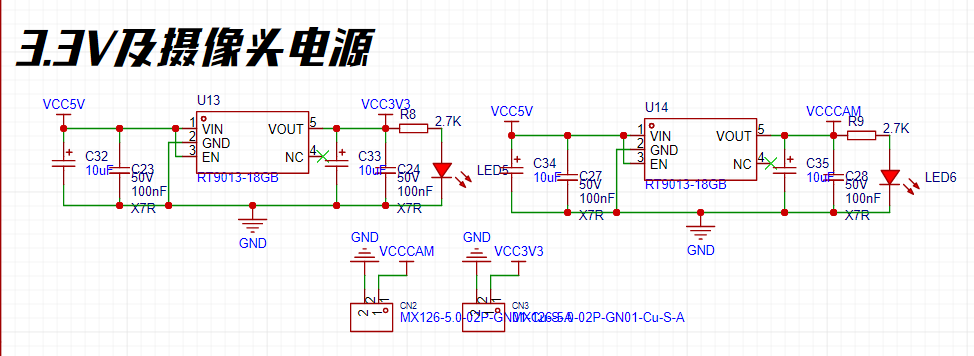
2. LDO稳压电路采用RT9013,用于给单片机供电以及外设供电。
3.采用DRV8701作为电机驱动,控制简单,可PWM调速。
4无刷电机接口,连接两个动量轮无刷电机,如果不是以竞赛为目的,可以去买不带竞赛标签的,某宝搜索nidec无刷电机即可,价格大概5-6元包邮,非常便宜。而带竞赛标签的需要150。
5.扩展板的接线端子。根据需要,使用14PIN线与主控板连接。
二. 主控板部分
1. 与电源板连接部分
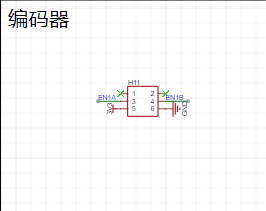
2. 底轮编码器接口,适用AB正交编码器

3. 无线串口,可接蓝牙模块进行远程遥控加调参
4. DAPlink,外置daplink接口,方便测试
5. 蜂鸣器,可以拿来方便辨别是否识别元素标志位(暂时没有用)
6.按键,可以实现按键调参(暂时没有用)
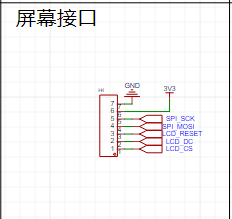
6. TFT屏幕,使用的标准接口1.8寸spi屏幕
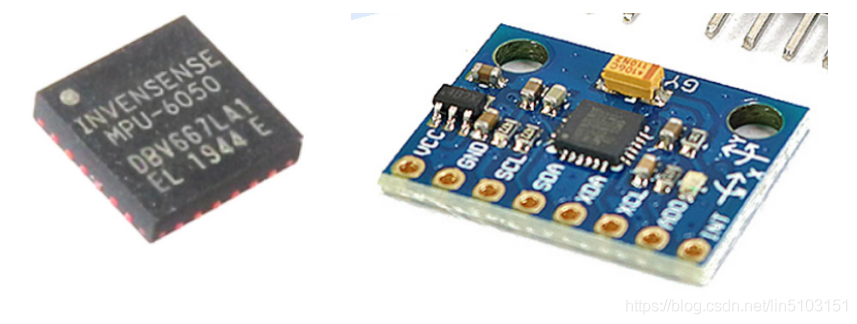
6.陀螺仪:
陀螺仪使用 MPU6050 模块,MPU6050 模块是 InvenSence 公司推出的 6 轴运动处理组件,内部整合用有 3 轴陀螺仪和 3 轴加速度传感器,通过 IIC 接口与外部通信,且自带数字运动处理器 DMP(Digital Motion Processor)。通过 DMP,可以大大降低单片机的运算负担,该模块被广泛应用于航模等产品。工作电压为 3.3V 到 5V。
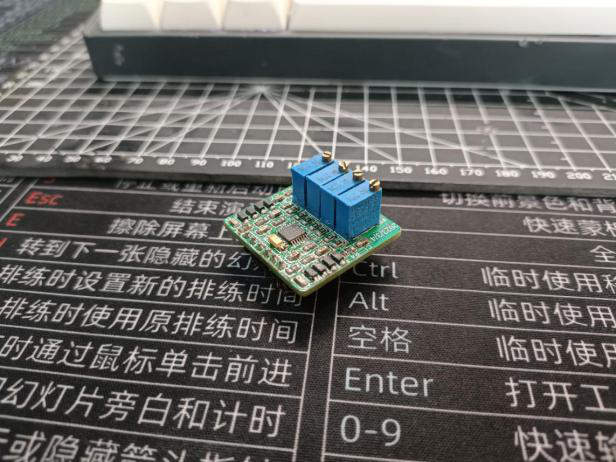
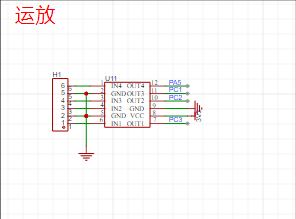
7. 运放模块,为了使用方便,采用ZF接口,方便各位智能车选手复刻和调试
8. 电感采集
任务元素比较简单,采用两个电感。中间电感未用
设计注意事项
提示:这里说明作品在制作中需要注意的一些注意事项(没有可以不写)
其他
演示视频:演示视频上传附件即可,附件最大只能长传50M的文件,大于50M的文件可放置在其他网盘或视频网站上,只需把地址链接放入这里即可
工程附件:参加活动的作品必须把工程相关的程序附件上传至开源平台或个人的代码存储云端,附件最大支持50M上传(请勿在立创工作区上传,有限制)
比赛视频:【独轮组,省赛寄了】 https://www.bilibili.com/video/BV1Cm4y1s7sD/?share_source=copy_web&vd_source=8530e16b2191c64ba463287a5f0dc3b6
演示视频:【基于梁山派的独轮车完赛了,准备开源】 https://www.bilibili.com/video/BV1gu4y1b7b5/?share_source=copy_web&vd_source=8530e16b2191c64ba463287a5f0dc3b6
总结:
我们通过理论研究和实验验证,结合硬件和软件优化,以及对机械结构的调整等工作,成功地开发了一套较为合理的独轮车控制方法。通过角度融合技术,我们能够准确获取车辆的行驶状态,并结合速度和方向控制。在这个基础上,通过巧妙的PID计算,将控制变量传递给动量轮和电机,实现了独轮车的平稳运行和精准循迹。
然而,我们也要诚实地承认我们的工作仍存在一些不足之处。尤其是在独轮车的稳定性控制方面,我们尚未达到极致的平稳性,一些细节尚未得到充分的考虑。在新的环境中适应性差,表现出较弱的抗干扰能力。参数冗余难以调节,这使得我们离真正的“智能汽车”目标还有一定的距离,需要进一步努力和改进。
我们将持续致力于优化控制算法、提高慢速控制的极致性能,并加强对细节的精准处理,以提升独轮车的整体性能和抗干扰能力。通过不断地改进和创新,我们期望能够更接近实现智能汽车的目标,为未来的独轮车技术发展贡献更多的可能性。
十八届智能车也是我们的遗憾,山东赛区67秒完赛,特别感谢队友的支持与陪伴,感谢山东建筑大学崔老师跟杨老师的指导,感谢与其他高校同学们的交流,我在这一年里真的受益匪浅。同时,这个项目也是与我的队友同时完成的。
下一届做智能车的同学,衷心欢迎你们踏上这个充满挑战与机遇的竞赛之旅,
同时,我也送给你们一句话:
初心高于成败,过程胜于输赢。
当然我深信,你们将创造出更为辉煌的篇章!



 24
24
 38
38
加载中...
是否需要添加此工程到专辑?

