



描述
项目说明
一款基于AM32/HF32固件的32位无刷四合一电调器,适用于多轴飞行器、攀爬车、船等领域。
开源协议
本硬件设计在CC-BY-NC-SA 4.0协议下发布,仅供爱好者DIY学习交流使用,严禁任何形式的商业使用。本设计按原样提供,不提供任何形式的工作保障/售后保修,不对任何因产品设计、操作不当以及违反当地法律法规所造成的制作人、第三方人身财产资源损坏/损害的后果及连带责任负责。
CC-BY-NC-SA 4.0,知识共享许可协议-署名-非商业使用-相同方式共享。
CC:知识共享许可协议(英语:Creative Commons license)的缩写。
BY:署名,您必须给出适当的署名,提供指向本许可协议的链接,同时标明是否(对原始作品)作了修改。
SA:相同方式共享,如果您再混合、转换或者基于本作品进行创作,您必须基于与原先许可协议相同的许可协议分享发布您贡献的作品。
NC:非商业使用,您不得未经许可将本作品用于商业目的。
项目相关功能
产品概述
-
-
- 32 位处理器:基于32 位处理器,提供更高的处理性能和精确度,有助于实现更高级别的飞行控制。
- 四合一设计:集成了四个独立的电调器,方便用户在小型多轴飞行器中安装和调试。减少了电线连接和板载空间。
- 支持多种电机协议:伺服PWM,Dshot300,Dshot600。
- 板载电流计设计:可通过飞控地面站查看实时电流。(功率底板板载)
- 调速范围广泛:具有广泛的调速范围,允许用户根据不同应用需求进行调整。
- 配置工具:提供了可视化的配置工具 Esc_Config_Tool ,使用户可以轻松地调整参数和配置电调器以适应不同的飞行需求。
- 固件升级:通过 Esc_Config_Tool 来对固件进行升级,以便用户可以随着时间的推移享受新功能和性能的改进。
- 轻量化设计:采用紧凑设计,在性能不变的情况下尽可能地缩小PCB的体积,以满足飞行器对重量和空间的要求。
- 开源固件:AM32 固件是开源的,用户可以根据需要自行修改和定制。
- 适用范围广:适用于多轴飞行器以及攀爬车、船等。
-
产品参数
-
-
- 尺寸:29.6mm*22.6mm*4mm( 控制部分半孔核心板) 40.559mm*47.201mm*5mm( MOS管大功率部分底板 ) 40.559mm*47.201mm*7mm(ESC)
- 工作电压范围:10~40V,推荐采用3~6s航模电池供电,极限8s。
- 主控:AT32F421K8U7:雅特力科技ARM® Cortex®-M4微控制器,高达120MHz的CPU运算速度与内建数字信号处理器(DSP),最高可支持64KB闪存存储器(Flash)及16KB随机存取存储器(SRAM)。
- 栅极驱动器: FD6288Q:集成了三个独立的半桥栅极驱动集成电路芯片,专为高压、高速驱动 MOSFET 和 IGBT 设计,可在高达+250V 电压下工作。
- 电流计:INA199:双向、零漂移、低侧或高侧、 电压输出、电流分流监测器。
- Buck:采用 SY8303 高效同步整流,能够提供 3A 电流的降压型 DC-DC 转换器,将供电电压降为8V,给栅极驱动器供电。
- Ldo:采用CJA1117B-3.3低压差线性稳压器,给32 位主控供电。
- PCB设计:采用 控制部分半孔核心板 和 MOS管大功率部分底板 分离的设计,其中核心板采用4层板设计,底板采用6层板设计。
- 固件:AM32/HF32
-

项目属性
本项目为首次公开,为本人原创项目。项目未曾在别的比赛中获奖
项目进度
2024/01/01 -- 2024/02/16 使用嘉立创专业版完成了此电调的硬件部分设计
2024/02/17 -- 2024/03/25 等待打样并学习开源固件AM32/HF32
2024/03/26 -- 2024/03/27 焊接电路
2024/03/28 -- 2024/04/01 测试电调的相关功能,并上机试飞
设计原理
硬件结构框图
四合一电子调速器(Four-in-One Electronic Speed Controller,4-IN-1 ESC)。其硬件部分主要由核心处理单元、电源管理单元、反电动势检测电路、栅极驱动电路、三相逆变桥电路、电流检测电路等组成。

电源管理单元
电调电源管理单元由一路BUCK电路和一路LDO电路构成,BUCK电路将动力电池的24V左右的电压降压输出为8V,为栅极驱动电路供电,然后BUCK电路输出的8V电压又经过一路LDO降压为3.3V,为电调主控和电流计供电。电源树图,如图所示。

低压差线性稳压器部分选用CJA1117B-3.3,其输出固定的3.3V电压,1A的电流输出能力和极低的噪声特性适合作为电调的四个主控的供电。
在BUCK电路的降压型DC-DC转换器的选型方面,设计选用SY8303AIC型号的同步高效整流降压型DC-DC转换器,相比于传统的异步整流,同步整流技术采用通态电阻极低的MOSFET来取代整流二极管,从而大大降低整流电路的损耗,提高DC/DC转换器的效率。在其输出电压方面,本设计通过确定SY8303AIC的FB端分压电阻的比值来控制BUCK电路的输出电压大小。根据SY8303AIC的芯片手册,得到的输出电压与FB端分压电阻的比值的关系如下:

其中,R1为上分压电阻,R2为下分压电阻。根据上述公式,当需要BUCK电路输出电压为8V时,R1选用110KΩ,R2选用9.1KΩ。BUCK电路原理图,如图所示。

反电动势检测电路
电子调速器的反电动势检测电路主要由分压电路与过零比较电路构成。
无刷直流电机通过电子控制器来顺序激励定子上的绕组,产生旋转磁场。之后,产生的旋转磁场与转子上的永磁体相互作用,从而产生电磁转矩,驱动转子旋转。电子控制器必须准确知道转子的实时位置,因为我们只有知道了转子到达了预定位置之后才能进行换相,这样电机才能顺滑的运转。转子位置检测常用的有三种方式:
(1)基于电压的过零比较,通过比较三相电压与电机中性点电压来检测转子位置。优点在于连接线少,硬件电路简化。缺点是启动时需要开环控制,这可能导致低速时控制性能不佳,且硬件电路相对复杂。
(2)通过安装霍尔检测转子位置,通过在电机上安装三个间隔120度的霍尔传感器,利用磁场的变化来检测转子的位置。霍尔传感器能够提供关于转子磁极位置的精确信息,从而实现准确的换相控制。这种方式的优点是电路结构简单,但会增加电机成本。
(3)加装磁编码器,直接检测转子的确切位置信息。这种方法成本较高,通常用于要求高精度位置反馈的场合。
在进行详尽的比较分析后,本设计决定采用基于电压的过零比较方式来检测转子位置,因为无人机通常不需要低速运行,从而避免了过零比较在低速时控制效果不佳的问题。此外,采用无传感器控制策略的无刷电机驱动系统,简化了系统的硬件架构,减少了电机与驱动器之间的连线数量,从而降低了整体的系统复杂性。此外,由于减少了外部组件的使用,系统的成本以及稳定性也得到了有效的控制。分压电路的目的是缩减电机绕组产生的反电动势至微控制器能够处理的电压范围,从而为无刷电机的控制提供必要的电压参考。过零比较电路的目的是通过捕捉无刷电机在运转过程中,当反电动势从负逐渐上涨超过电机中性点电压的时候,或者当反电动势从正逐渐下降低于电机中性点电压的时候就捕获到一个过零信号。以此作为转子位置的反馈。这一反馈使得电机的电子控制单元能够精准地识别出电流换相的最佳时机,从而实现电机的平滑运行和高效能转换,确保了动力输出的连续性和稳定性。反电动势检测电路原理图,如图所示。

栅极驱动电路
栅极驱动芯片选用FD6288Q,主要因为该芯片集成有三个独立半桥栅极驱动器,这样的高集成度减少了外部组件的数量,从而降低了故障风险。此外,FD6288Q支持高电压操作,具备高速开关特性,并且内置了过流保护、欠压锁定等保护机制,增强了系统的整体稳定性。自举二极管和自举电容是栅极驱动电路的关键组件,下面具体阐述两种元器件的功能以及在选择它们时应注意的要点。
自举二极管的作用主要是在栅极驱动电路中提供一个充电路径,使得在每个开关周期中,自举电容能够被充电并维持所需的电压水平。当低侧开关导通时,自举二极管将允许电流流过,从而对自举电容进行充电,同时自举二极管还有助于防止栅极驱动电路中的电压过冲和噪声,从而保护栅极驱动电路的稳定性。在选择自举二极管时,需要选择高反向击穿电压和反向恢复时间短的二极管。因为,高反向击穿电压保证了自举二极管能够在高侧开关工作时,承受较高的电压冲击。短的反向恢复时间意味着自举二极管能够迅速地从正向导通状态切换为反向截止状态。在无刷电机驱动应用中,短恢复时间使得开关频率更高并且可以减少在开关转换期间的能量损耗,从而提高电机的控制精度和响应速度。基于上述两点特性来考虑,本设计选用1N4148WTQ-7开关二极管作为自举二极管。其80V的反向击穿电压和4.0 ns的反向恢复时间,确保了在高频开关操作中的高可靠性和稳定性。
自举电容的作用则是存储能量,以便在需要时为栅极驱动电路提供电压。在半桥驱动电路中,自举电容在低侧开关导通时通过自举二极管被充电,当高侧开关导通时,自举电容通过栅极驱动器的输出放电,为高侧MOSFET的栅极提供电压。
在选择自举电容时,选择陶瓷电容并依据下面的公式计算其容量。

其中,Cbs为自举电容的容值,Qg为MOSFET的栅极电荷,Vcc为FD6288Q的供电电压,Vf为自举二极管的正向压降值。
由电调的电源管理单元的设计,得到Vcc为8V,根据MOSFET和二极管的数据手册得到的Qg为143nC,Vf为1V,将上述三个变量的值代入上述公式得到自举电容的容值,最小为204.29nF。根据计算的结果,考虑到自举电容如果选用的容值远大于计算的204.29nF,会增加电路的充放电时间,影响系统的响应速度和动态性能。如果选用的容值小于204.29nF,则没有容量来存储足够的电荷,无法提供足够的瞬态响应,导致栅极驱动电压不足。最后选用了具有1μF容值、耐压50V、封装为0402的陶瓷电容,以确保在高频开关操作中的高可靠性和稳定性。栅极驱动电路原理图,如图所示。

三相逆变桥电路
三相逆变桥电路由六个MOSFET组成,分为上桥臂和下桥臂,每臂各有三个开关器件,控制三相电流的通断。其中MOSFET的栅极下拉电阻起着至关重要的作用。当MOSFET的驱动信号被撤销时,下拉电阻提供了一条放电路径,使栅极电容能够快速放电。这一过程确保了MOSFET可以迅速且准确地关闭,避免了因驱动信号撤销不及时而导致的能源浪费和潜在热损害。同时,下拉电阻的存在确保了在没有驱动信号的情况下,MOSFET保持在一个低电位的稳定关闭状态,有效防止了因外部干扰或内部噪声引起的误动作。在选择MOSFET时考虑到MOSFET的漏极-源极电压必须高于电调输入电压以及电机反电动势产生的电压尖峰,连续漏极电流应能够承受电路中的最大电流。此外,还需要考虑到MOSFET的导通电阻,这是MOSFET导通时的等效电阻,它会在电流通过时产生热量,选择低导通电阻的MOSFET有助于减少功率损耗和提高效率。综合考虑上述三点,本设计选择NTMFS5C410NL ,该MOSFET的相关参数如下:Vds为40V。在100°C环境温度下,最大连续漏极电流为230A。在10V的栅极-源极电压下,导通电阻的最小值和典型值分别为0.65 mΩ和0.82 mΩ。三相逆变桥电路原理图,如图所示。

电流检测电路
电流检测电路的作用是:在电子调速器中用于精确测量流过电机相线的总电流。将电池容量除以该电流,结果就是电池可使用的时长。通过上述计算,可以判断无人机剩余的使用时长。电流计选用INA199A,其是一款双向、低侧、零漂移、电压输出的电流检测放大器,该电路原理图,如图所示。

软件说明
- 固件说明:(目前采用1.99版AM32固件)产品的固件采用github上开源的AM32-MultiRotor-ESC-firmware。
- AM32固件地址:GitHub - AlkaMotors/AM32-MultiRotor-ESC-firmware: Firmware for stm32f051 based speed controllers for use with mutirotors
- AM32具有以下特点:
- 可通过 betaflight 直通、单线串行或 arduino 进行固件升级(推荐powerwriter)
- 伺服PWM,Dshot(300,600)电机协议支持
- 双向 Dshot
- KISS 标准 ESC 遥测
- 可变PWM频率
- 正弦启动模式,旨在使较大的电机加速
固件烧写步骤
①首次焊接好电调的控制部分半孔核心板,之后需要进行bootloader的烧录(该烧录步骤需要进行4次),烧录工具以及烧录文档会放到附件中,需要自行准备powerwriter烧录器(下图所示)。

②掏出powerwriter烧录器连接到电调控制部分半孔核心板的烧录点,烧写器VREF(3.3v)接V,gnd接G,swclk接C,swdio接D。
③打开 Power Writer 连接目标芯片

④连接上目标芯片AT32F421x8,点击“Program Memory”

⑤加载需要的bootloader.hex 文件(AM32_F421_PB4_BOOTLOADER_V4.hex),然后点击“写入”。(hex文件详见附件“AM32固件资料”)

以上的步骤重复4次给四个AT32主控都刷写bootloader
⑥将控制部分半孔核心板的S1、S2、S3、S4端口分别与飞控的电机接口相连,切记注意顺序,即S1~S4依次连接飞控的电机1~4。并将飞控的电调协议改成DSHOT600。
⑦打开 Esc_Config_Tool 对其烧录AM32固件,注意需要自己选择M1 M2 M3 M4,也需要重复4次烧录AM32固件。
(固件详见附件“AM32固件资料”)

⑧至此已经为电调烧录好了AM32固件。之后的更新固件只需要重复⑥⑦两步。
PS:也可以烧录HF32固件。烧录步骤见视频所示。
实物展示
四合一电子调速器的PCB 采用叠板的设计,因为MOSFET的漏极和源极之间流经的电流非常大,通过将控制部分的半孔板焊接在功率部分的底板上,可以创建更短的路径给高电流走线,从而增加电调的过流能力。
控制半孔板采用四层板进行设计,叠层关系为信号(顶层)-参考地(内层1)-电源(内层2)-信号(底层)。
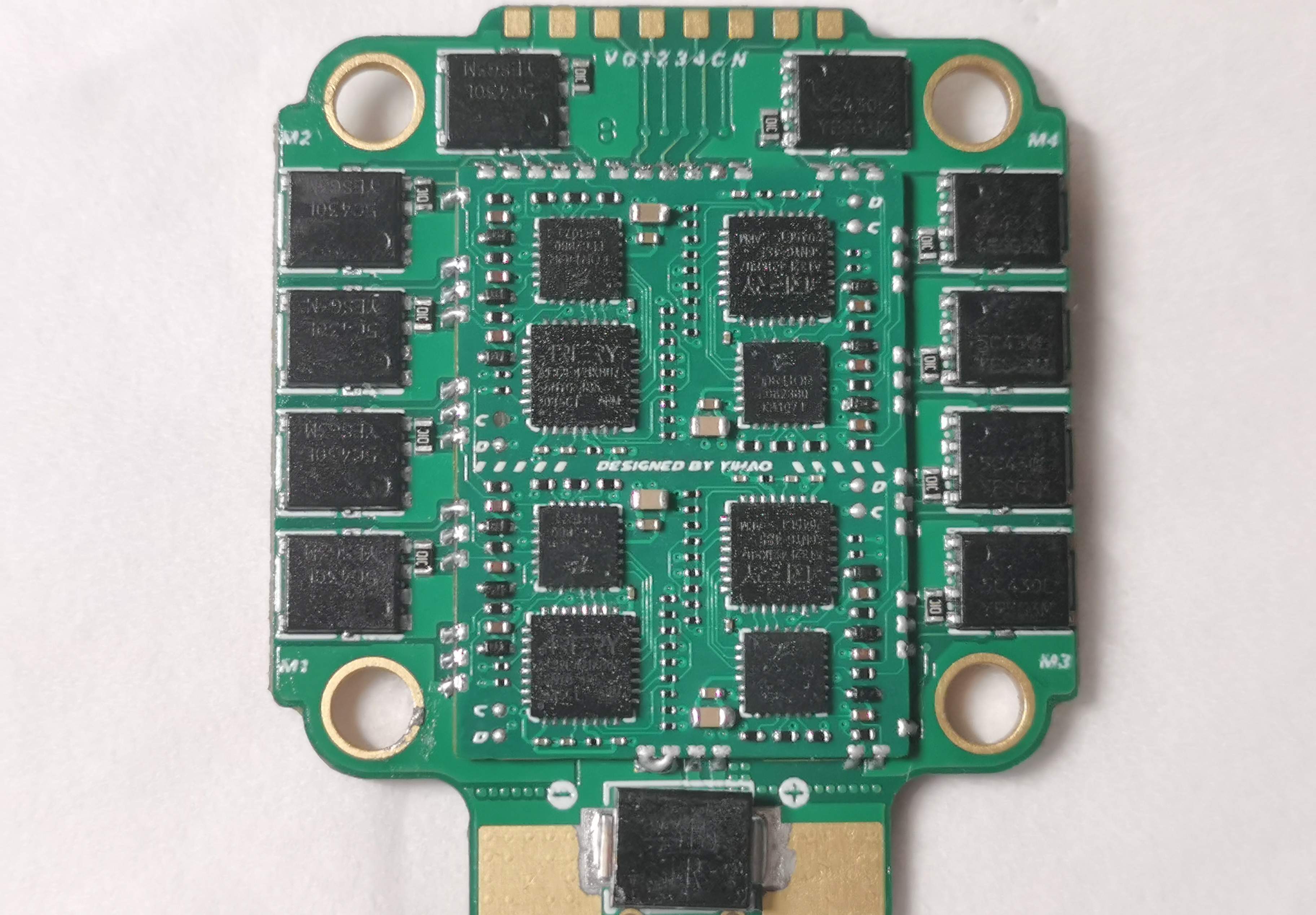
功率底板则采用六层板设计,六层中三层为电源层、三层为地层。并且在大电流走线部分采用开窗堆锡技术,这样的布局能够在高电流区域实现更宽阔的走线,从而进一步提升电调的过流能力,此外,在母线上配置大容量的陶瓷电容器(MLCC)用来进行电源滤波以及吸收电机反电动势产生的电压尖峰。MOSFET在布局时靠近连接的电机相线,以缩短走线长度,减少电阻,优化整体性能。四合一电调的电路板实物图,如下图所示。

图(1)四合一电调正面(2)四合一电调背面
Fig. (1) The front of the 4-IN-1 ESC and (2) The back of the 4-IN-1 ESC
演示视频
设计注意事项
本设计按原样提供,不提供任何形式的工作保障/售后保修,不对任何因产品设计、操作不当以及违反当地法律法规所造成的制作人、第三方人身财产资源损坏/损害的后果及连带责任负责。
- 控制板与功率板由四周的邮票孔进行连接,注意摆放方向。
- 复刻此项目难度较大,最小处采用0201封装,焊接有一定难度,需要非常好的耐心(可能需要多次调试,甚至炸机),以及较好的学习能力,能够通过不同的方式解决遇到的困难,包括但不限于焊接,刷写固件,合理使用固件。所以仅推荐玩过无人机并且熟练焊接贴片元器件且对PCB及元器件有一定了解的模友进行复刻,请充分考虑动手和解决问题能力之后再选择是否复刻。
- 供电电压的选择:该电调理论最高40V输入,为预留余量,推荐采用3~6s航模电池供电,极限8s(不推荐)。
- 元器件的选型:需要根据输入电压进行滤波电容的选择(建议电容在立创商城购买,TB虚标现象泛滥)。
- 焊接时请使用硅胶线(28~30AWG)连接飞控,防止焊盘受力脱落。
- 注意线序!注意线序!注意线序!
- 可以在电调供电焊盘处并联固态电容,推荐值:35V1000uF或35V470uF。用来降低电调对飞控供电的干扰。
- 整个项目的元器件成本大概在100元左右,包括功率底板的元器件(MOS管采用拆机翻新品质,价格随时浮动,仅供参考)。但是注意,电调成本往往仅占整架无人机的成本的很小一部分。
- 焊接之后进行检查再上电,驱动电机等操作。一定要先检查是否短路,简单的方法就是用万用表的蜂鸣器档位来查看。 然后将万用表打到欧姆档200K,然后测量每组电机接线处的任意两个焊盘,并测量任意两个焊盘间的阻值(12 13 23 共三组),一般正常来说阻值是21.3K~21.9K。

其他
感谢sjj12345、mtbsk8两位前辈大佬的开源。
觉得不错,三连支持一下呗或者可以打赏一下(嘻嘻,更多支持 更多动力)

咨询商务合作
绿泡泡:18008336997
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









