


H743V1.0飞控(星火计划) MAVERICK_H743_MK1.0
简介
【开源】H7高性能飞控(MAVERICK_H743V1.0飞控),适用于穿越机、固定翼、高校科研无人机。
简介:【开源】H7高性能飞控(MAVERICK_H743V1.0飞控),适用于穿越机、固定翼、高校科研无人机。开源协议
:CC BY-NC-SA 4.0
(未经作者授权,禁止转载)描述
项目说明
为了更好地进行后续无人机项目的开发以及穿越机的使用,于是乎开发一款高性能、小体积并且兼容多个开源飞控固件的基于STM32H743的飞控。该飞控适用于穿越机、固定翼、高校科研无人机,主要用于小型四旋翼无人机,也可用于多轴飞行器以及无人机基础的教学无人机使用也可以用于无人车、无人艇等遥控模型。
开源协议
本硬件设计在CC-BY-NC-SA 4.0协议下发布,仅供爱好者DIY学习交流使用,严禁任何形式的商业使用。本设计按原样提供,不提供任何形式的工作保障/售后保修,不对任何因产品设计、操作不当以及违反当地法律法规所造成的制作人、第三方人身财产资源损坏/损害的后果及连带责任负责。
CC-BY-NC-SA 4.0,知识共享许可协议-署名-非商业使用-相同方式共享。
CC:知识共享许可协议(英语:Creative Commons license)的缩写。
BY:署名,您必须给出适当的署名,提供指向本许可协议的链接,同时标明是否(对原始作品)作了修改。
SA:相同方式共享,如果您再混合、转换或者基于本作品进行创作,您必须基于与原先许可协议相同的许可协议分享发布您贡献的作品。
NC:非商业使用,您不得将本作品用于商业目的。
项目相关功能
- 一款基于STM32H743VIH6主控的无人机控制器
- 本模块是飞控的控制板,可以配合不同的电设使用,实现低成本无人机。

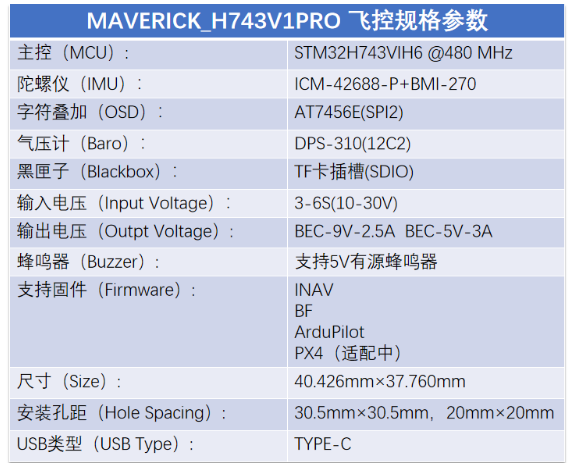
Maverick_H743_V1.0 飞控配置如下:
- 一款高性能超小体积无人机控制器
- 采用STM32H7系列高性能单片机STM32H743VIH6(480MHZ),体积相比STM32H743VIT6更小,从而在保持飞控性能不变的情况下进一步缩小飞控体积。
- 采用双IMU设计(ICM-42688-P+BMI-270)实现稳定的飞行效果。让飞行更稳定,操控更加精确,无论竞速还是全速自由飞都能轻松驾驭。同时也支持替换为封装为LGA-14的陀螺仪。
- 内置5V/2.5A、9V/2A的BEC,给外接GPS、光流计、接收机、磁力计、图传等外设提供稳定可靠的电源。
- 两路LDO(RT9013 @500mA),其中一路给IMU单独供电,使陀螺仪工作更稳定。
- 内置OSD模块,可以在图传界面实时显示一些飞机的相关数据,便于飞手进行操控。
- 内置TF卡接口,可以一次性储存多量飞行数据,完美的避免黑匣子很快就满了的问题。
- 内置DPS-310高性能气压计,能实时感知飞机高度。同时也支持替换为SPL06/BMP280/DPS310。
- 内置CAN芯片。
- 板载SBUS反相器以及有源蜂鸣器驱动器。
- 引出多种接口,方便连接不同的外设。UART: 7路 (1.2.3.4.6.7.8) SBUS: 1路(RX2) I2C: 1路 SPI: 1路 CAN: 1路 PWM: 13路 (10路电机,1路灯带,2路舵机) ADC: 3路 (VBAT,Current,RSSl) USB: (Type-C)
 支持固件:
INAV(已适配)
BF(已适配)
支持固件:
INAV(已适配)
BF(已适配)
ArduPilot(已适配)
PX4(适配中)
进Q群拿最新固件, QQ交流群:940196990(因为固件的版本会一直迭代,这里一更新要审核一阵子)


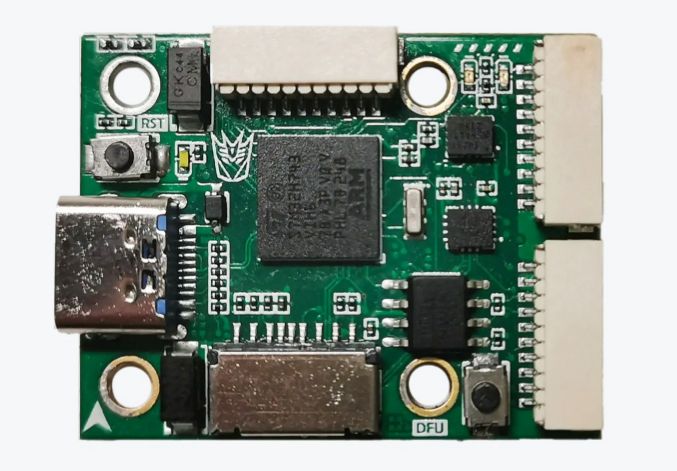
- 复位按键(可以不焊接)
- TVS瞬态抑制二极管
- STM32H743VIH6主控
- 状态指示灯
- 双IMU
- CAN芯片
- BOOT0按键
- TF卡
- LDO
- SBUS反相器以及有源蜂鸣器驱动器
- 气压计
- osd
- 5V buck
- 9V buck
项目属性
本项目为首次公开,为本人原创项目。项目未曾在别的比赛中获奖。
项目进度
2023/08/08 -- 2023/08/31 已经使用嘉立创专业版完成了此飞控的硬件部分设计
2023/09/01 -- 2023/09/03 对比不同的开源飞控固件进行整合固件
2023/09/05 -- 2023/09/17 焊接电路
2023/09/19 -- 2023/09/25 测试飞控相关功能
2024/01/15 -- 2024/00/00 已上机试飞
QQ交流群:940196990
后续计划:继续测试剩余功能
设计原理
无人机飞行控制系统(Flight control system)简称飞控,可以看作飞行器的大脑。多轴飞行器的飞行、悬停,姿态变化等等都是由多种传感器将飞行器本身的姿态数据传回飞控,再由飞控通过运算和判断下达指令,由执行机构完成动作和飞行姿态调整。
无人机飞控系统是由多种硬件和软件组成的,下面将分别介绍无人机飞控系统的各个组成部分。
1. 传感器
传感器是无人机飞控系统的重要组成部分,它能够感知无人机的状态信息。传感器主要包括以下几种传感器:
(1)加速度计:用于检测无人机的加速度和倾斜角度。
(2)陀螺仪:用于检测无人机的角速度和角度。
(3)罗盘:用于检测无人机的方向。
(4)气压计:用于检测无人机的高度。
(5)GPS:用于检测无人机的位置和速度。
2. 控制器
控制器是无人机飞控系统的核心部分,它能够处理传感器获取的信息,并向执行器发送指令。控制器主要包括以下几种控制器:
(1)飞行控制器:用于控制无人机的飞行姿态、高度、速度等参数。
(2)导航控制器:用于控制无人机的航线和航向。
(3)遥控器:用于控制无人机的起飞、降落、转向等操作。
3. 执行器
执行器是无人机飞控系统的最终执行部分,它能够根据控制器的指令控制无人机的飞行。执行器主要包括以下几种执行器:
(1)电调:用于控制电机的转速。
(2)电机:用于控制无人机的飞行。
(3)舵机:用于控制无人机的转向。
4. 软件
无人机飞控系统的软件主要包括以下几种:
(1)飞控软件:用于控制无人机的飞行。
(2)导航软件:用于控制无人机的航线和航向。
(3)地面站软件:用于监控无人机的状态和控制无人机的飞行。
无人机飞控系统是无人机的核心控制系统,它能够自动控制无人机的飞行姿态、高度、速度等参数,使无人机能够完成各种任务。该系统是由多种硬件和软件组成的,其中包括传感器、控制器、电调、电机等。无人机飞控系统具有广泛的应用领域,可以用于农业、海洋、消防、搜索救援等领域,有着重要的应用价值。
本飞控主要是根据飞控固件里面的引脚定义配置进行绘制原理图,在处理器主控的选择上选用高性能的STM32H743VIH6,相关陀螺仪采用当下比较具有性价比的BMI270,ICM42688-P,并且在PCB的布局上使用双陀螺仪布局,气压计选用DPS310等,相关传感器模块的选型以及参数见Maverick_H743_V1.0飞控配置以及附件。并且该飞控在设计时考虑到日后开发需要外接GPS、罗盘、接收机、机载电脑、视觉处理模块、图传摄像头等设备于是乎使用SH1.0接口引出相关串口、I2C、SPI。
软件说明
软件是用市面上开源飞控固件,该飞控兼容
INAV(已适配)
Betaflight (已适配)
PX4(未适配)
ArduPilot(已适配)
相关飞控固件的源码以及思路,请到这些固件的开源地址查看,这里不再赘述。
实物展示


演示视频
视频链接:
[开源] H7飞控-高性能-低成本-小体积【星火计划】_哔哩哔哩_bilibili
【开源】H743飞控【150元低成本】【点赞评论-抽送SMT样板】【星火计划】_哔哩哔哩_bilibili
试飞视频后续上传B站
设计注意事项
制作需要注意的几个地方:
- 复刻此项目难度较大,最小处采用0201封装还有BGA芯片,焊接难度较大,需要非常好的耐心(可能需要多次调试,甚至炸机),以及较好的学习能力,能够通过不同的方式解决遇到的困难,包括但不限于焊接,刷写固件,合理使用固件。所以仅推荐玩过无人机并且熟练焊接贴片元器件且对PCB及元器件有一定了解的模友进行复刻,有条件的可以开钢网用风枪进行焊接(钢网gerber文件见附件)。请充分考虑动手和解决问题能力之后再选择是否复刻。
- 供电电压的选择:该电调理论最高30V输入,为预留余量,推荐采用3~6s航模电池或者18650、21700电池组进行供电。
- 元器件的选型:需要根据输入电压进行滤波电容的选择(建议电容在立创商城购买,TB虚标现象泛滥)。
- 焊接时请使用硅胶线(28~30AWG)连接飞控,防止焊盘受力脱落。
- 6个10P的SH1.0接口座子建议焊接好之后拿一些热熔胶进行固定,防止焊盘受力脱落。
- 注意线序!注意线序!注意线序!
- 整个项目的元器件成本大概在120元左右。但是注意,飞控成本往往仅占整架无人机的成本的很小一部分。
- 飞控固件烧录,如果是烧录BF固件的话,推荐烧录附件里的通用HEX,烧录完成后CLI输入附件中的引脚配置文件。按住BOOT按钮,连接飞控USB到电脑,松开BOOT按钮,进入DFU模式。然后使用Betaflight Configurator或者其他地面站进行烧录,烧录APM固件请使用INAV地面站。(固件见附件)如果是INAV或者APM固件,接下来就是在地面站里进行配置调参等步骤。如果是BF固件还需要在CLI命令行里面刷写特定的配置文件。(BF配置文件见附件)
接线说明
详细接口引出以及外设接线参考以下两张图:


其他
我想 啰嗦 几句:
这个飞控是作者本人精心设计出来的,绝对不是什么粗制滥造的东西。飞控里面的布局布线优化改版迭代了好几代,有什么好的建议可以在此评论区或者B站留言(参与迭代V2.0)
这个H7飞控的焊接还是需要一些熟练度的,有BGA有0201,建议有焊工基础的可以尝试打样焊接,另外建议有穿越机或者无人机以及stm32基础的人员进行开发。
现阶段此飞控已开车(山鹰代开),另外如果有想要自行开车的,请提前于作者本人联系 。自行开车盈利必究。(B站:@逸灏Yihao)
QQ交流群:940196990
PS:现在V2.1版本已经设计好了,可以看B站最新视频介绍
觉得不错,三连支持一下呗或者可以打赏一下(嘻嘻,更多支持 更多动力)

参考 :
飞控正面布局参考了HKUST-Aerial-Robotics开源的NxtPX4 (https://github.com/HKUST-Aerial-Robotics/NxtPX4),相关引脚定义参考了MATEKH743-WING。
已经测试完成 :
①双IMU
②气压计
③多种进入DFU方式
④OSD
⑤所有电源部分
⑥GPS
⑦控制 自制基于AM32固件的四合一电调【开源】自制AM32四合一电调——单路电机驱动测试_哔哩哔哩_bilibili
设计图
BOM
 克隆工程
克隆工程 暂无相关工程
暂无相关工程
评论