


模块化平板电脑-QPad

简介
模块化平板电脑:QPad。 模块化设计:CPU模块和功能模块可以根据需求更换,兼容树莓派、香橙派等模块作为核心板。 适用工业场景:现场调试、通信测试、传感器数据采集、监测终端、轨迹记录等。
简介:模块化平板电脑:QPad。 模块化设计:CPU模块和功能模块可以根据需求更换,兼容树莓派、香橙派等模块作为核心板。 适用工业场景:现场调试、通信测试、传感器数据采集、监测终端、轨迹记录等。开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
项目说明
模块化工业平板电脑:QPad。
模块化设计:核心板和功能模块可以根据需求更换,兼容树莓派、香橙派等商业模块作为核心板。
适用工业场景:现场调试、通信测试、传感器数据采集、监测终端、轨迹记录等。
目前版本V1.0,难免存在一些不足之处, 后期计划一直更新该项目,可收藏持续关注。后期会在B站陆续更新各种应用场景的视频。
B站视频:失踪人员回归,手搓我的第一台定制化Ubuntu平板电脑[星火计划]_哔哩哔哩_bilibili
优化版本已搞定,主要更新内容:
1、将所有板卡安装在一个面上,减少线缆数量及长度。
2、设计独立IO面板,更换模块可以只改面板,不用打印整个外壳。
3、优化电源管理模块。
千呼万唤始出来,终于把3D打印的赶出来了。(因为壁厚和材质的原因,外壳些许变形,暂且忽略,后期会跟进CNC的外壳。)

图1--windows版本(第一次打印版,白色的材料有点透光,后期改了深色。)

图2--Ubuntu版本(第二次打印外壳,效果好了很多。)

图3--顶部接口图(屏幕背光开关主要应用场景是,用作服务器时,可以主动关闭屏幕)

图3.1--更新后的独立顶部接口图

图4--背部示意图(其中为CNC外壳设计的天线区域没有用上,因为CNC没通过,后期也懒得改模型了,还是按CNC的模型打印的。)

图5--整体效果图

图6--内部布局图
功能模块(项目设计各种功能板卡较多,可去工程文件查看):
1、GPS+BD定位模块(轨迹记录等GIS产品)
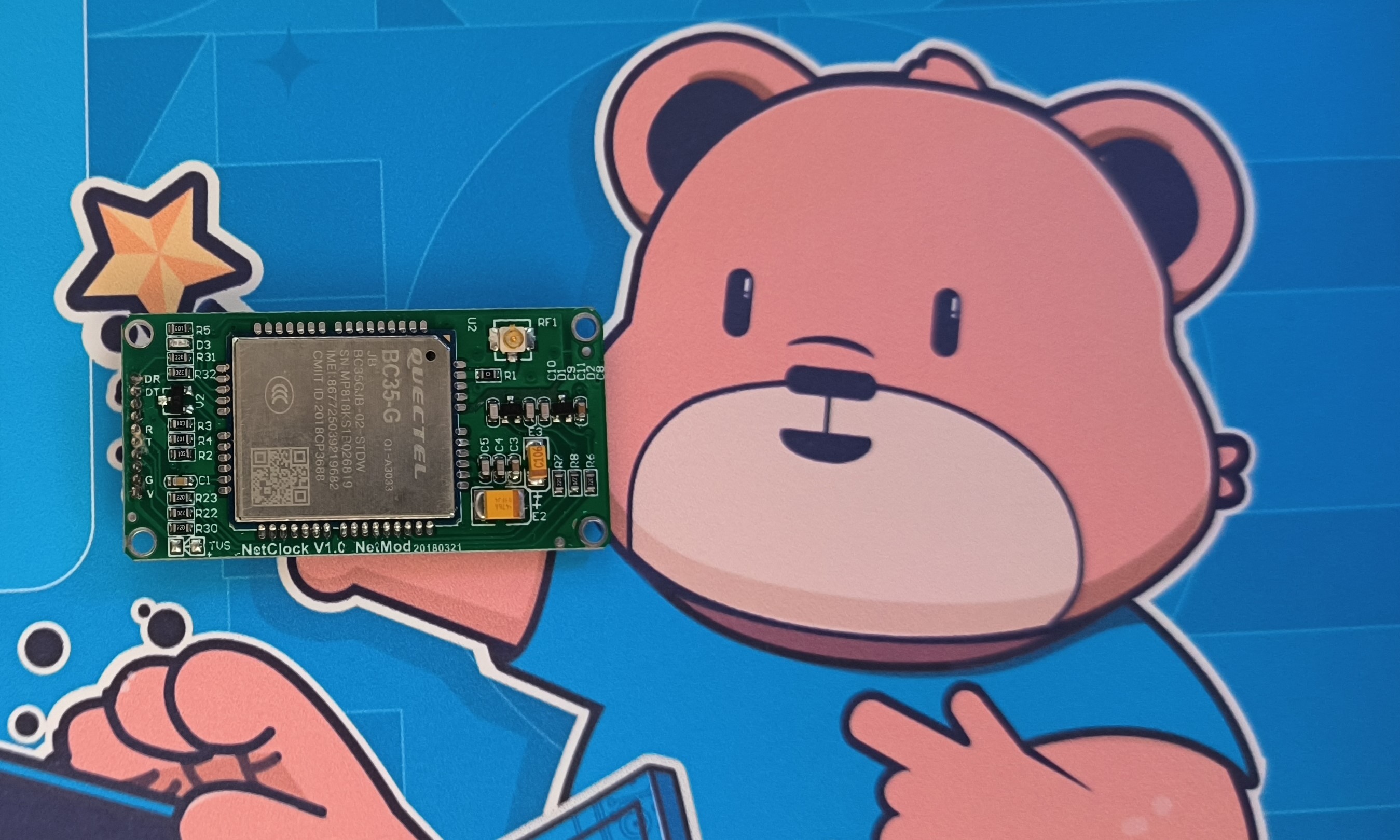
2、NBIot通信模块(物联网产品测试)
3、4G通信模块
4、WiFi和有线网络(标配)
5、串口模块(支持TTL、RS485/422/232电平,工业调试必备)
6、2.4G无线模块(作数据采集终端时多节点汇聚功能)
7、存储扩展模块(扩展大容量硬盘存储数据)
开源协议:
GPL
项目相关功能
1、显示:最终采用了性价比极高的9.7寸IPS屏,拥有2K分辨率,想必大家已经知道是什么屏幕了。
2、核心板:核心板兼容树莓派、香橙派等单板机作为核心板使用(有时间的话下一步适配泰山派)。
为了满足性能的需求,决定最大支持12x12的主板,这次设计可以兼容NUC6i5的主板,

3、功能模块:
关于扩展模块的接口,笔者思考了很久,一开始是想参考PCI-E类似的接口,但是鉴于模块功能并没有那么复杂,使用太多Pin的接口有点大材小用了,然后又想定制私有接口……
想来想去,突然发现桌子角落的优盘,为什么不用USB接口呢?
于是,本设计所有的扩展功能都走USB接口,既方便有简单。
将所有功能分为两类:高速和低速。高速的走USB3.0,低速的走USB2.0.
USB3.0模块:
- 存储扩展模块
- RJ45网口扩展模块
- USB3.0扩展
USB2.0模块:
- GPS+BD定位模块
- NBIot通信模块
- 4G通信模块
- 串口模块
- 2.4G无线模块
4.过度的模块化就会显得繁琐,过度的集成化就显得不灵活。两者平衡,决定把部分常用(必须功能)功能集成,包含如下功能:
- RJ45网口扩展
- M.2硬盘扩展
- 屏幕驱动部分采用了DP转EDP直驱,有效节约了电路复杂程度,如果使用HDMI接口时,可以使用去年星火计划的NCS8803模块.
- 电池管理部分采用LM25116芯片将电池电压降到12V供系统使用,另外屏幕背光专门使用一颗TD1583芯片。
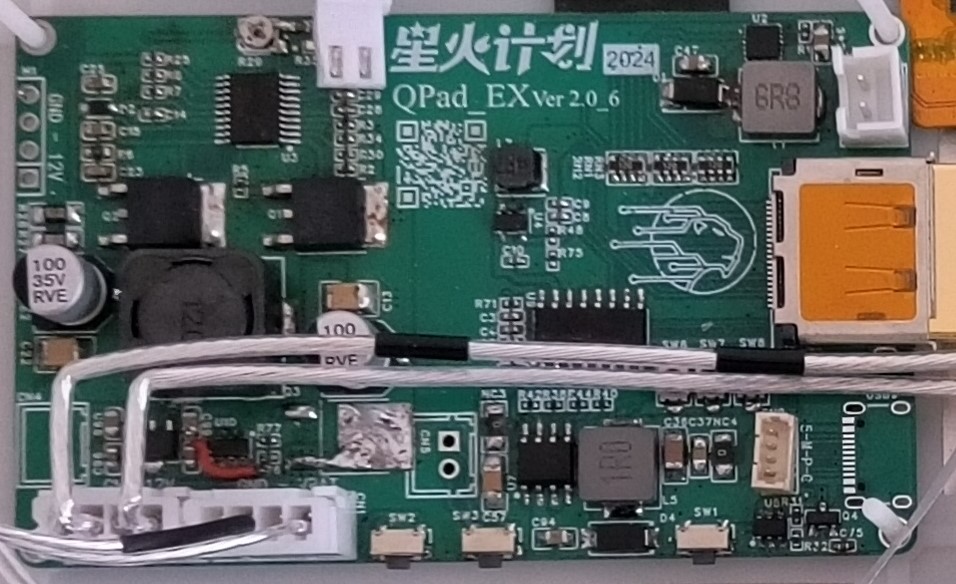
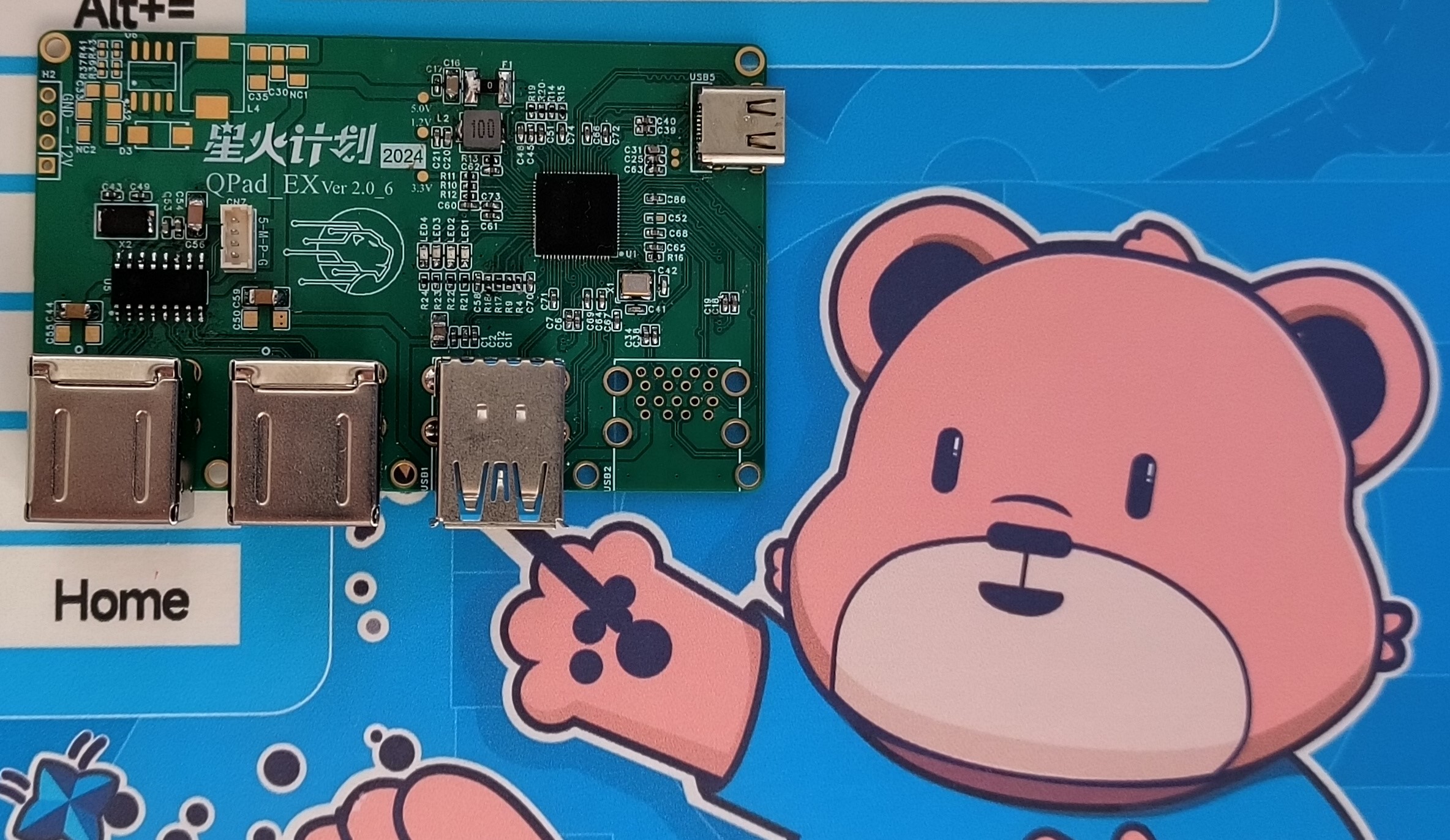
- USB3.0扩展、USB2.0扩展接口,左侧提供4路2.0接口,右侧提供4路3.0接口。该模块在使用的核心板USB数量不足时使用。


然后是非必须功能,通过模块的方式扩展:
- GPS模块,采用中科微电子的ATGM332D模块,ATGM332D系列模块采用12.2×16mm的尺寸,基于中科微第六代多系统GNSS SoC单芯片AT6668,支持北斗二号和北斗三号(B1I和B1C)、GALILEO、GPS/QZSS/SBAS、GLONASS等卫星导航系统。

- NBIot通信模块(避免重复开发,该模块使用以前的项目模块,通过串口接入系统。)


项目属性
本项目为首次公开,为本人原创项目。项目未曾在别的比赛中获奖。
项目进度
3-4月:项目系统架构搭建,明确各模块的具体实现方案和芯片选型,初步确定产片外观。(已完成)
5-6月:电路设计及打样测试。(截至5-15,已完成电路设计,申请打样测试)
7月:根据测试修改完善电路部分。
常在河边走,哪能不湿鞋。
第一版免费的SMT踩雷了,将大部分功能设计到了一块板子上,结构在设计外壳时实在时放不开了(规划时忽略了电池的体积),
而且3.0HUB芯片自己焊的,焊了三个也没搞定,遂放弃了这一版,又重新设计了分立的小板子,可以根据需要选择使用哪些板子。

调试过程:
下图这个是使用NUC6作为核心板(为什么不用最新的NUC12呢?因为经费有限/(ㄒoㄒ)/~~有没有赞助商……)
图中那根miniDP转DP的视频线买不到合适长度的,这个是自己焊的,用了我几个小时,量长度时忘记考虑插头的长度(粗心+1),所以现在看起来还是稍微长一点点。
NUC6正常使用(非满载)只有不到2A的电流,还算是比较省电的。
安装Ubuntu时电流会超过2A。
散热问题:
一是散热器直接接触CNC的铝外壳增加散热效果,图中因为使用的3D打印外壳,所以将散热器贴在了屏幕的金属背板上。
二是计划在外壳上增加一个4cm的风扇向外吸风。
此外,该核心板拥有丰富的USB接口,所以USB扩展版暂时没有安装。
空间问题:
极限就是安装NUC主板作为核心板,看见图中的空间基本已经满了,剩下的地方仅能安装几个USB扩展模块,
但是如果使用树莓派的单板机作为核心板的话,空间还是十分充裕的,可以参考后面图片。


下图是使用香橙派作为核心板的组装示意图,可见空间就十分宽裕了。

8月:根据组装情况定型产品外观,设计外壳并打印。
设计原理
1、电源部分采用4串锂电池供电,主变压将锂电转换到12V后供各模块使用,拓扑结构如下图所示:

其中耗电量比较大的部分,如屏幕背光和M.2硬盘电源,采用12V直接变压到所需电压。

【12V主供电电路】
其他供电,分别独立转换。

【各电压分供电电路-部分】
软件说明
1、连接IMU6050模块的可视化调试程序(python)-----IMU6050-serial.py

2、Ubuntu系统下ROS下激光雷达的驱动源码---xv_11_laser_driver-hydro-devel.zip
3、GPS模块的调试软件---U-center (室内窗口处测试,收星效果不好。)

4、IMU-6050模块(自制)上的板载单片机程序---IMU6050 - C0.1.rar
实物展示
正面照。

略显厚重,但是能装下NUC的极限厚度了。

顶部从右到左依次是 总电源开关、核心板开关机、屏幕开关(用作服务器时可以单独关闭屏幕)、充电接口。

内置扬声器,左右各一个。

效果图

效果图

效果图

。
设计注意事项
1、使用NUC作为核心板时,必须在出风口增加风扇辅助散热,推荐使用4x4x0.7的风扇。
2、USB接口板外接大功率用电设备时,连接该模块的12V供电,并断开USB口的5V处的0欧姆电阻。
3、为了兼容高性能的NUC主板,该设计厚度控制不理想。
4、GPS模块上串口芯片CH340N的8pin需要连接一个0.1uF的去耦电容。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









