
专业版
2023年E题【运动目标控制与自动追踪系统】phantom
1.1w
0
0
1
简介
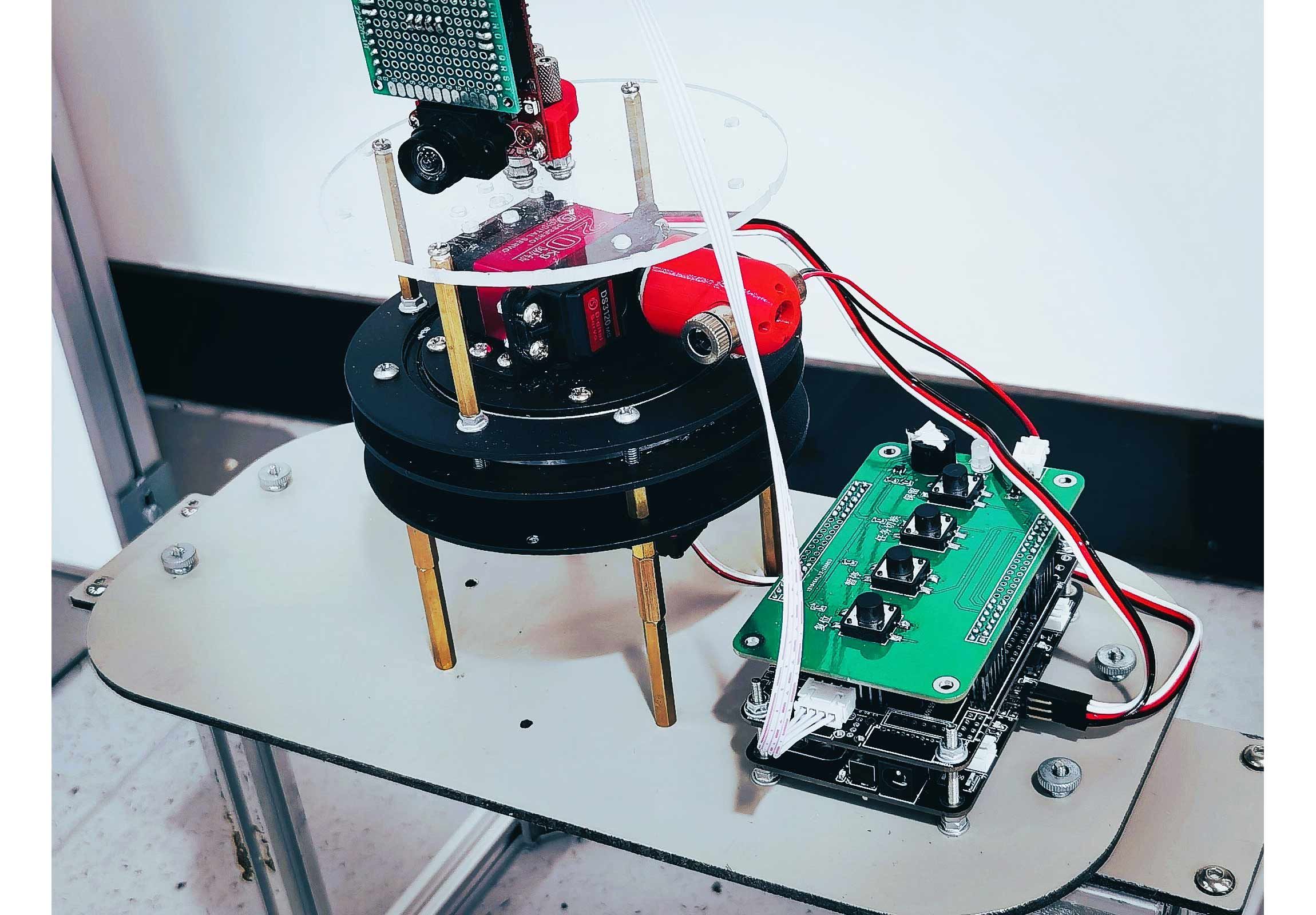
我们以 STM32F407VGT6 单片机为核心板、 openMV 为视觉平台辅助控制,使用 FreeRTOS 操作系统设计了一套鲁棒性较好的运动目标控制系统和自动追踪系统。
简介:我们以 STM32F407VGT6 单片机为核心板、 openMV 为视觉平台辅助控制,使用 FreeRTOS 操作系统设计了一套鲁棒性较好的运动目标控制系统和自动追踪系统。开源协议
:GPL 3.0
创建时间:2023-03-30 18:32:34更新时间:2023-09-13 09:38:55
描述
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论