
4310永磁同步电机FOC驱动板
简介
基于stm32g431cbu6+drv8323开发进行的永磁同步电机驱动板,适用于4310型号电机(本人使用的是海泰的HT4310-10电机),上面集成MT6816进行减速前角度检测。
简介:基于stm32g431cbu6+drv8323开发进行的永磁同步电机驱动板,适用于4310型号电机(本人使用的是海泰的HT4310-10电机),上面集成MT6816进行减速前角度检测。开源协议
:MIT License
(未经作者授权,禁止转载)描述
一、项目简介
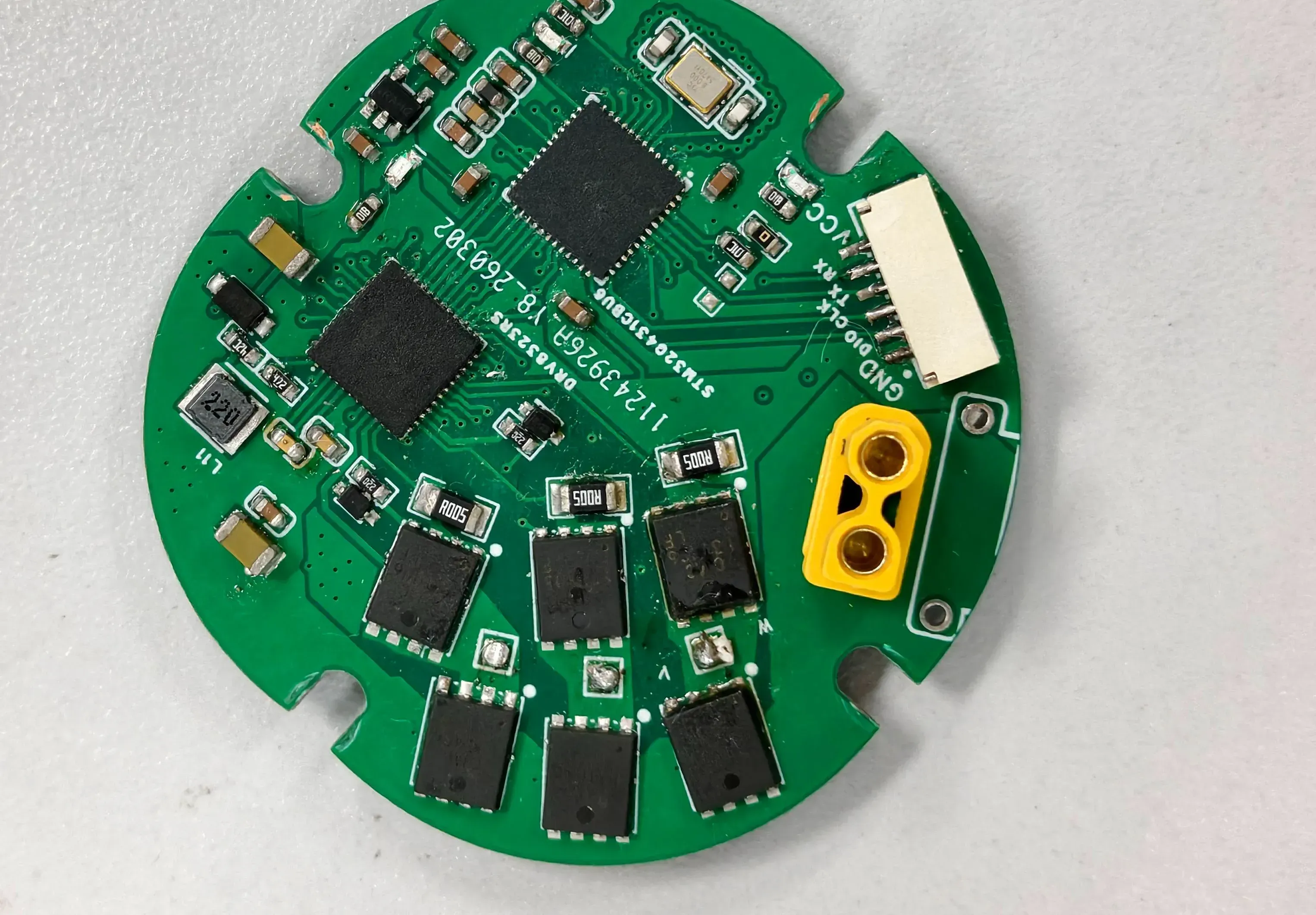
这是一款基于STM32G431CBU6的单路FOC驱动板,支持电流/速度/位置三环闭环控制,适用于机器人关节/云台/无人机/机械臂等场景。本驱动板结构较为简单,适合有一定有感FOC了解后对设计FOC驱动板感兴趣的人参考,如有不足,支持补充。
二、核心硬件配置
2.1 主控芯片
-
型号:STM32G431CBU6(第一版使用STM32F334C8T6)
-
内核与主频:芯片采用ARM Cortex-M4F内核,主频170MHz,带有硬件浮点加速单元DSP
2.2 栅极驱动芯片
-
型号:DRV8323RSZGTR
-
关键特性:集成度很高,内置MOS管栅极驱动电路,高侧MOS管自举电路,DC-DC降压,三相低端电流采样,过流过温保护等,还可以通过SPI协议修改辅助参数比如死区补偿时间,电压放大倍数等,极大的减小了PCB空间,对于相对较小的电机很友好。
-
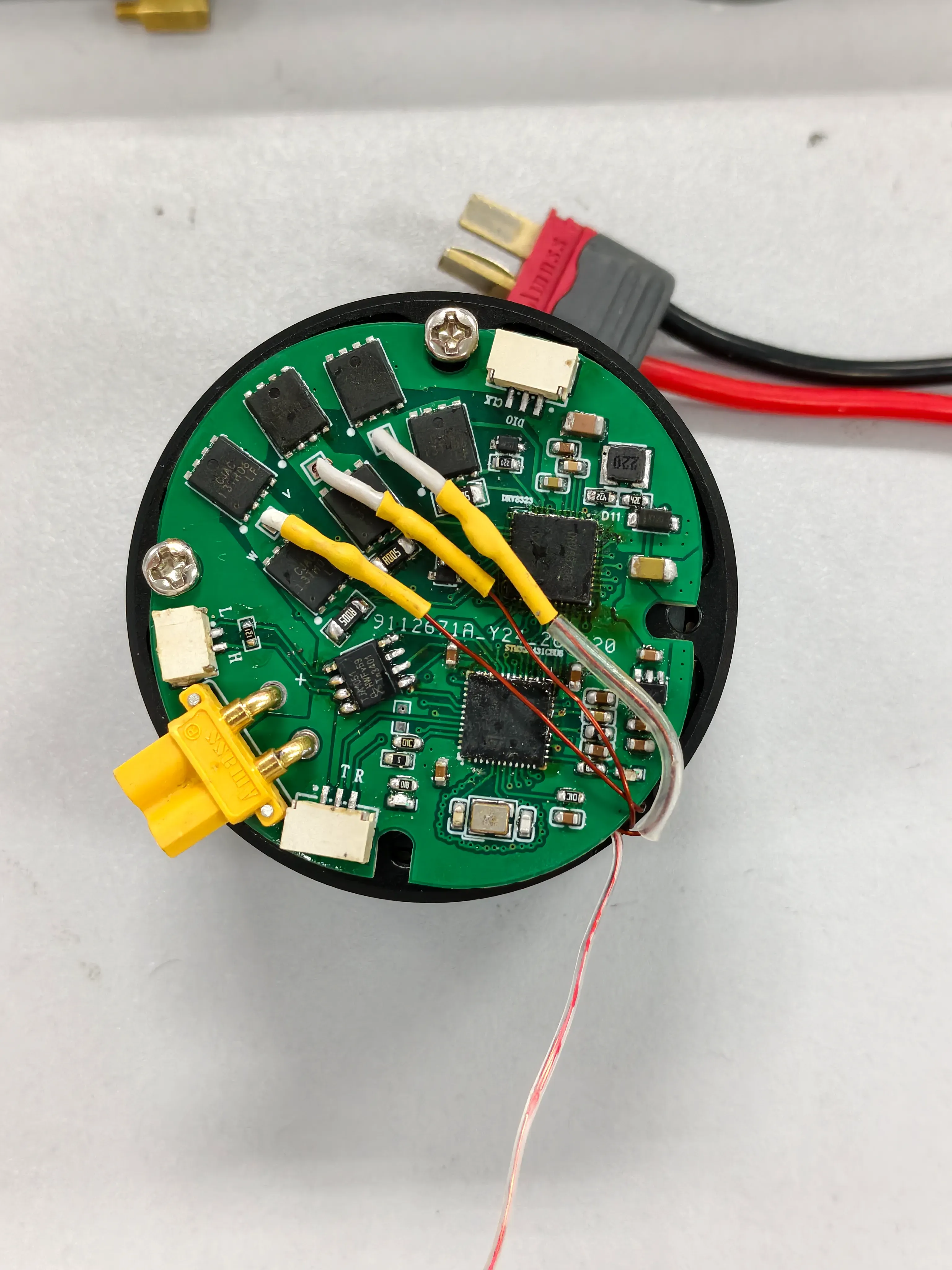
输入电压范围:24V输入经DRV8323降压到5V为CAN收发芯片和LDO供电。
2.3 传感器接口
位置传感器类型:使用14位MT6816磁编码器测量电机减速前的角度
传感器接口规格:使用SPI读取电机减速前绝对角度进行FOC计算
2.6 通讯与调试接口
-
通讯接口:支持CAN/UART双协议控制调试,CAN总线进行控制指令发送,可实现多电机控制;还可以UART设置电机参数以及简单控制电机。
-
调试接口:调试时使用SWD协议调试下载(建议使用JLink+Ozone调试,可在调试时较大程度的减少Debug对程序运行的影响)
三、软件与算法说明
3.1 控制算法
-
FOC控制方式:有感FOC控制算法
-
已实现的控制环:电流环 / 速度环 / 位置环
-
PWM调制方式:使用15kHz的SVPWM/SPWM
3.2 开发环境与工具
-
主控开发环境:本人使用VScode+EIDE(Keil MDK也可以使用)
-
FOC算法来源:使用自研FOC算法库进行控制,其中生成SVPWM有两种生成方式
3.3 软件状态
-
本工程以完成电流/速度/角度三闭环,CAN通信协议以加入其中,可根据通信协议进行电机控制。(后续将加入UART进行电机基础参数设置)
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论