


#第七届立创电赛#姿态显示+二维云台控制
简介
参考训练营官方案例设计的实时姿态显示以及加上自主设计的二维云台控制模块。通过采集MPU6050姿态数据并实时显示在OLED屏幕上和通过串口上报给四轴上位机,并且还能通过当前数据去控制二维云台的运动。
简介:参考训练营官方案例设计的实时姿态显示以及加上自主设计的二维云台控制模块。通过采集MPU6050姿态数据并实时显示在OLED屏幕上和通过串口上报给四轴上位机,并且还能通过当前数据去控制二维云台的运动。开源协议
:GPL 3.0
描述
注:* 为必填项
请在报名阶段填写 ↓
* 1、项目功能介绍
该项目是使用国民技术生产的N32G430系列为主控,数据获取模块是使用MPU6050六轴加速度传感器模块获取姿态信息,它在飞控、平衡车等领域都得到很广泛的使用,由此可见它具有非常强大的功能,深受每个电子人的喜爱。控制模块是则是使用二维云台,二维云台是每个电子专业的大学生经常接触的模块,它包括了运动姿态解析,舵机运动控制等许多领域。而这次的项目是把二维云台和MPU6050模块二者相结合,看他们能擦出怎样的火花呢。
*2、项目属性
该项目为首次公开项目,项目为作者自己原创,项目没有在其他比赛中获奖,项目没有在学校参加过答辩。
* 3、开源协议
GPL3.0
请在竞赛阶段填写 ↓
*4、硬件部分
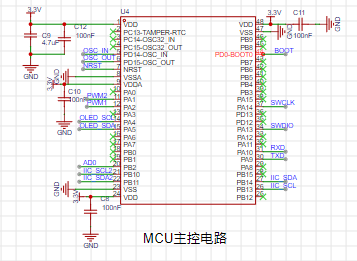
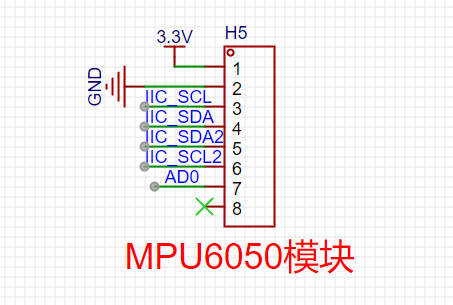
4.1 主控电路和MCU6050模块数据采集模块
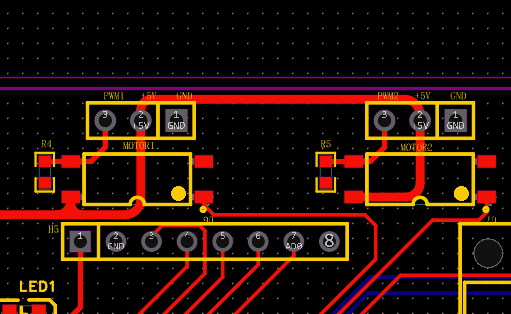
4.2 舵机接口电路
该模块使用了光耦进行隔离,设计初衷是在使用舵机的时候,由于舵机堵转或者快速转动的瞬间,会产生相对较大的反向电流,如果处理不得当,很容易会烧掉MCU或者一些传感器。所以,一般来说使用舵机就需要对舵机的控制信号进行隔离。而舵机的硬件布线也比较简单,我们只需要三条线:电源线,信号线,地线;
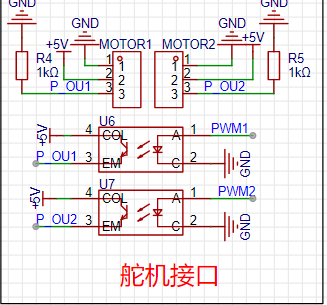
隔离电路如下:

这是经典的光耦隔离电路,从原理图就可以看出,光耦隔离的工作原理。右边,是信号输入,出入的PWM,会使光耦隔离器内部的发光二极管发光,是一个电信号变成光信号的过程,光信号会传输到左边,而左边是一个类似于三极管一样的器件,左边则是将光信号转变成电信号的过程,而能量则来自外部给的5V_DJ,中间的传输则是通过光来传输的。这样的话,电流只能正向流而不能反向流了,从而就起到了保护MCU和传感器的作用。
*5、软件部分
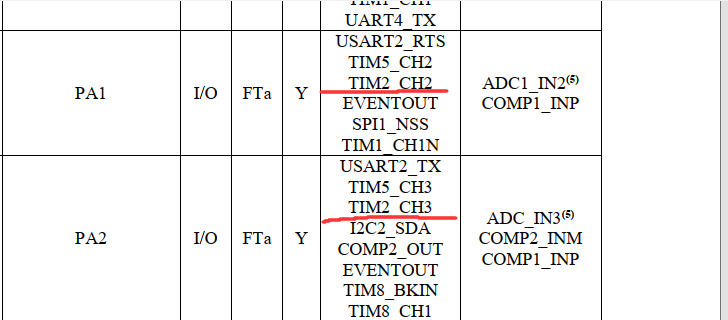
因为我使用的MPU6050模块使用的是正点原子官方的那一款,它和训练营官方使用的MPU6050模块的SDA和SCL引脚是相反的,所以我在代码上进行了修改,把原先的SDA和SCL互换了一下,最后也成功驱动了正点原子官方的那一款MPU6050。后面因为我加了二维云台控制,需要主控芯片产生PWM来驱动。所以我在官方数据手册里面查到了可以通过使用定时器二来产生两路PWM来分别控制二维云台的两个舵机,它们分别是通道二的PA1和通道三的PA2,如下图所示:
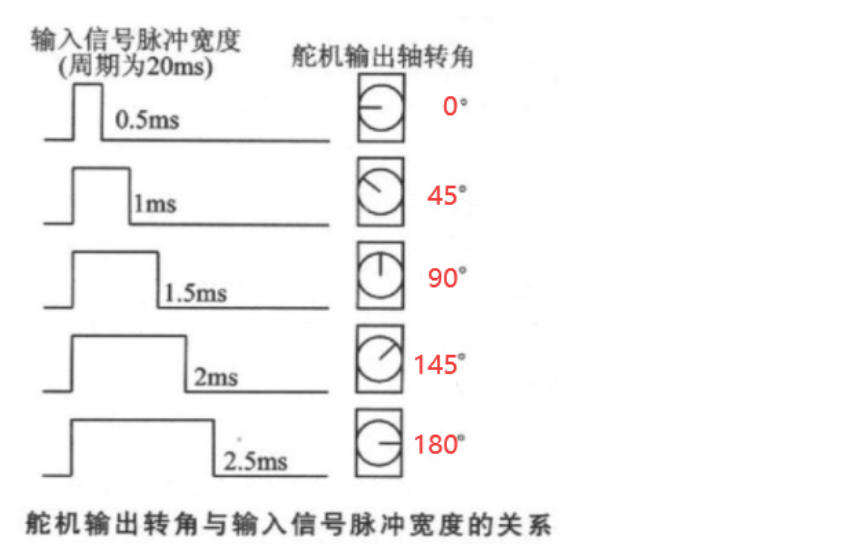
舵机说明:
使用的这款二维云台,它搭载的是两个SG90舵机。这款舵机价格比较便宜,能初学者入手舵机的不二选择。

舵机的控制需要MCU产生一个周期为20ms的脉冲信号,以0.5ms到2.5ms的高电平来控制舵机转动的角度。
*6、BOM清单
请输入内容…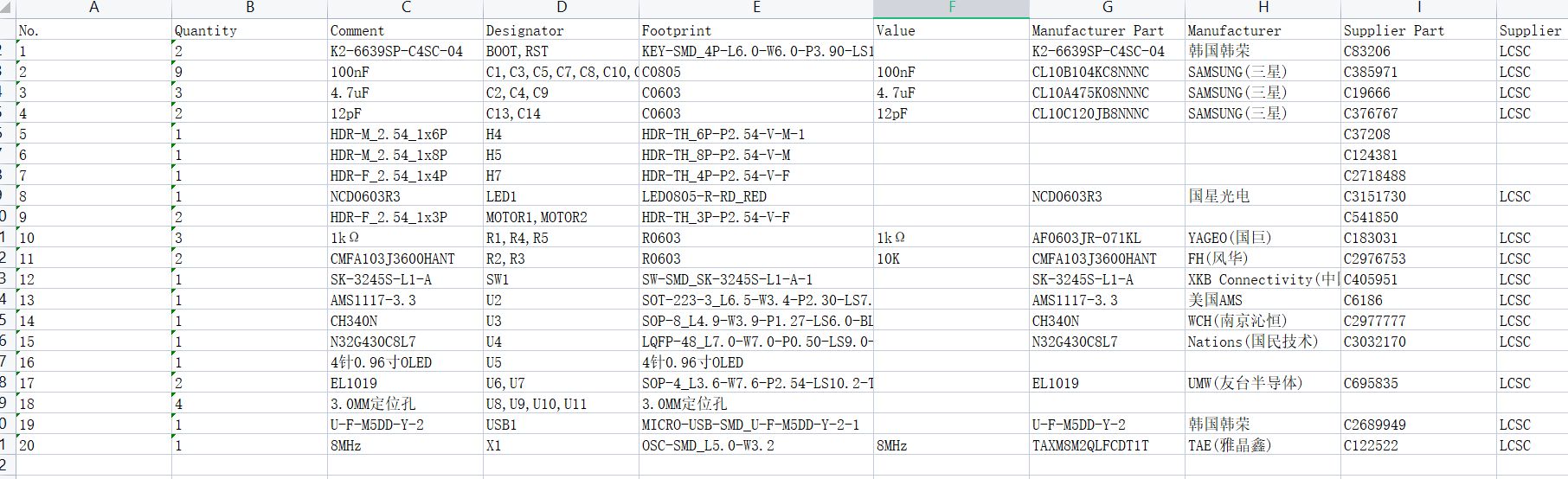
注:项目涉及的BOM清单。这个位置请上传BOM的截图。清单详情请以PDF的格式上传到附件中。建议包括型号、品牌、名称、封装、采购渠道、用途等内容。具体内容和形式应以表达清楚项目构成为准。
*7、大赛LOGO验证
 请上传包含大赛
请上传包含大赛
lo go的项目图片,logo以丝印形式印刷在PCB上面。
go的项目图片,logo以丝印形式印刷在PCB上面。
点击zip下载大赛logo标识! (大赛标识).zip
* 8、演示您的项目并录制成视频上传
视频要求:请横屏拍摄,分辨率不低于1280×720,格式Mp4/Mov,单个视频大小限100M内;
视频标题:立创电赛:{项目名称}-{视频模块名称};如立创电赛:《自动驾驶》-团队介绍。
更多详情:https://diy.szlcsc.com/posts/d76d9cb41705430e9a54e7a5feed07a5
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论