

开源协议
:GPL 3.0
描述
一、设计背景
PID(Proportion-Integral-Derivative,即比例-积分-微分)控制器是自动控制领域中最经典且广泛使用的控制算法之一,它通过实时调节系统的输入信号,使输出快速、稳定地达到期望值。PID控制器凭借其结构简单、适应性强、调节直观等优势,在工业控制、机器人、智能家居、航空航天等领域发挥着关键作用,是实现精确控制和自动化运行的核心技术。
在工程实践中,PID控制器能够有效应对系统的动态变化、外部干扰以及非线性特性,提高控制精度和响应速度。通过合理调整比例、积分和微分参数,PID算法可以优化系统的稳定性、减小超调并加快收敛速度,从而满足不同场景下的控制需求。无论是温度控制、电机调速还是无人机姿态调节,PID控制都展现了其强大的适应性和可靠性。
本项目设计的简易PID控制系统,旨在通过硬件与软件的结合,直观展示PID算法的工作原理及其调节效果。该系统不仅可以帮助初学者理解反馈控制的基本概念,还能为工程师提供一个快速验证控制策略的实验平台,对自动化技术的教学与实践具有重要的参考价值。同时,该设计也为进一步优化控制算法、提升系统性能奠定了基础,在工业自动化和智能设备开发中具有广泛的应用潜力。
该项目具备以下几个亮点:
- 采用核心板加扩展板设计理念,采用插件器件设计,让学习更能简单,让探索能更深入;
- 核心板选用国产立创开发板天猛星为主控;
- 项目综合程度高,实用性强;
- 项目学习资料丰富,包括电路设计教学、PCB设计等工程师调试能力的培养。
二、硬件设计
1.电源电路:

C1和C2用于滤波功能,LED用于示意有无电流。
2.开发板电路

只用了14个引脚。
3.电机驱动和接口

主控芯片BI和FI输出给马达。
4.按键电路

按键主要用于控制页面选项,还有马达开启关停。
5.关键物件购买

1:48的减速比马达。
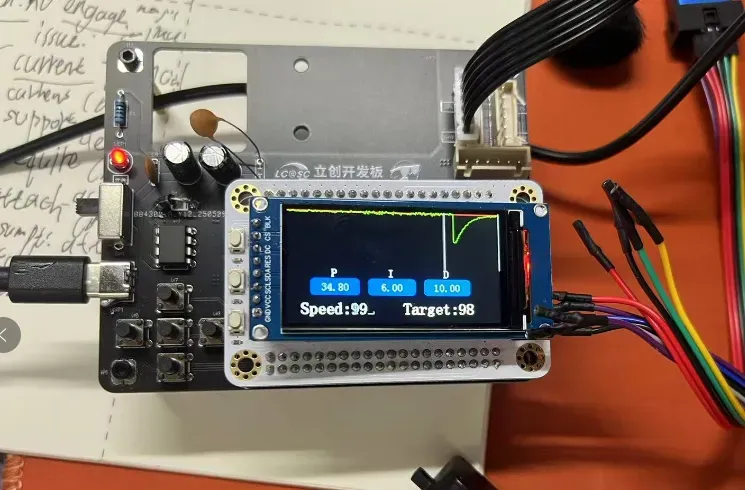
项目显示
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论