



【毕业设计】履带四足复合机器人
简介
本项目由立创EDA的星火计划支持,ESP32-WROVER-E为主控MCU,履足式机器人拥有两种行进模式:四足行进、履带行进,四足形态下共拥8个DOF,足端融入了履带机构,由4个直流电机驱动。
简介:本项目由立创EDA的星火计划支持,ESP32-WROVER-E为主控MCU,履足式机器人拥有两种行进模式:四足行进、履带行进,四足形态下共拥8个DOF,足端融入了履带机构,由4个直流电机驱动。开源协议
:GPL 3.0
描述
更新日志
2022.6.3———
创建更新日志:毕业准备回家,先收拾东西,暂停开发...
2022.6.16———
- 修改了结构部分购物清单
- 主控Version2.0版本验证成功
改动:
- 电机驱动更换:TB6612FNG —> RZ7899。优化了TB6612FNG芯片价格飙升问题,及开机履带不受控转动问题;
- 主控更换为ESP32-PICO-D4。相比ESP32-WROVER降低了成本,引脚资源更多,优化了布局空间,整体性能区别不大,缺点是不太好焊接;
- 删去了DET402G蜂鸣器;
- 删去了MITSUMI拨轮编码器;
- 多增添了一颗WS2812B-2020灯珠;
- 多引出了一处串口,拟打算外接卫星定位模块;(要问为什么引出了3处串口接口,而不将其中2处合并为1处以节省引脚资源。抱歉,才想到......
- 多引出了一处IIC 2.54 - 4P排针接口;
- 针对主控板与拓展板能够互通电源的M3铜柱孔,新增了肖特基二极管,以便调整是否互通及导通方向;
2022.7.20———
- 调试过程中一个电机损坏,返厂维修
- 上传该机器人总装配的step文件
2022.9.07———
- 由于后面打算将所有驱动电机,更换为无刷电机BLDC,故需一段时间来研究。
2022.11.30———
- 更新了一些链接,修正了一些内容
1.项目简介
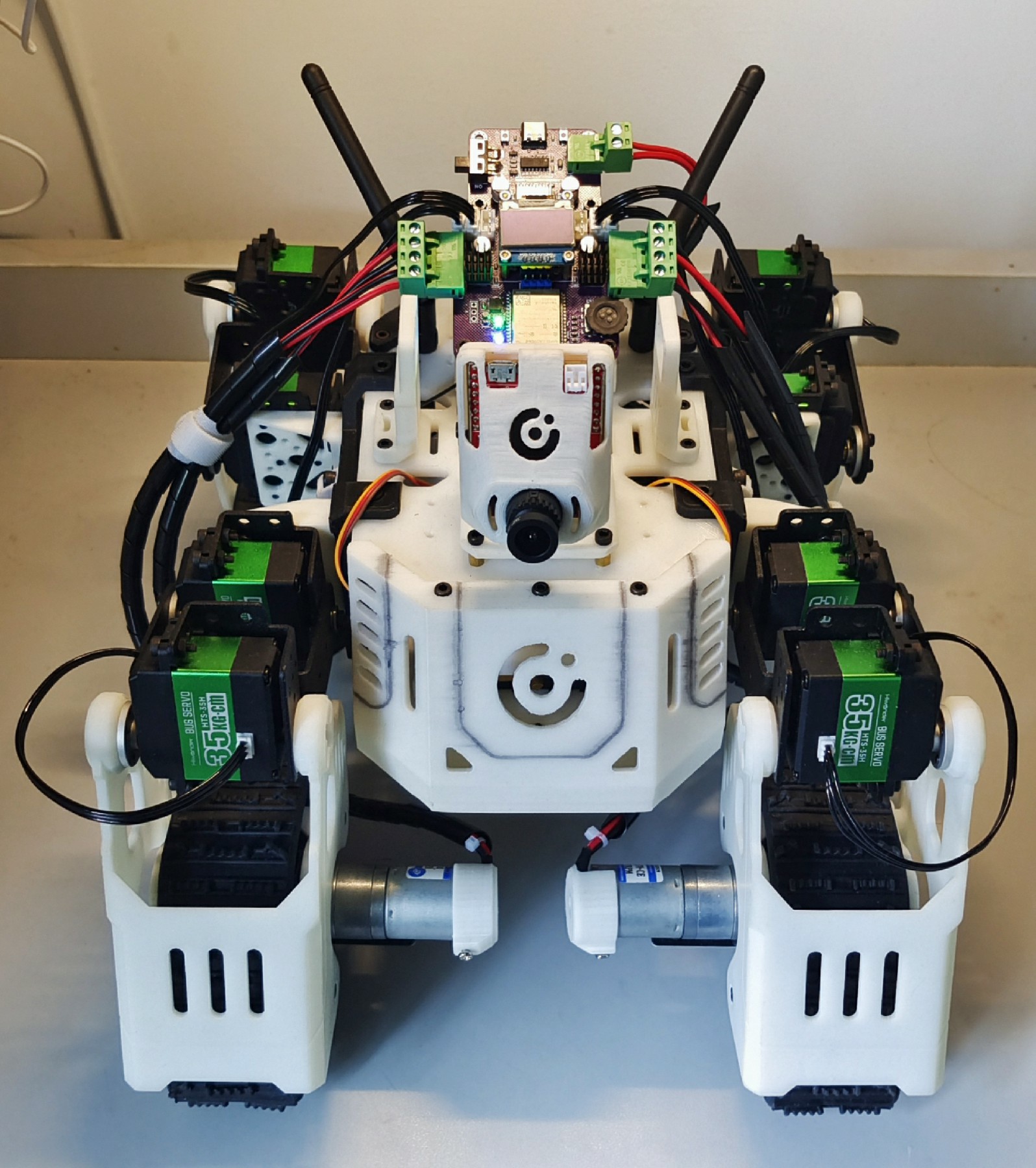
本项目中,履足式复合机器人有两种行进模式:四足行进模式、履带行进模式,应对不同场景及地形时能够切换形态。四足形态下整体总共有8个自由度DOF,单腿各具备2个自由度DOF,足端结构融入了履带机构,各履带机构配备1个直流电机驱动。
该机器人主控板的MCU模组为ESP32-WROVER-E(V2.0版本为ESP32-PICO-D4),能够实现针对总线舵机+PWM舵机+直流电机的控制,同时包括其他硬件资源:六轴加速度传感器、OLED屏幕接口、RGB灯珠、蜂鸣器等。
履带车形态在平坦或稍崎岖的地貌上能够保持较高的行进速度,降低了四足爬行的功率消耗;四足形态用于跨越障碍,灵活应对各类复杂地形环境,解决了履带结构应对高度落差较大地形难以翻越的痛点,即实现了仿生四足与履带式结构双优势结合的腿履协同。
履带四足复合机器人
<center class="half">


</center>
最初的构想来源——《使命召唤11:高级战争》中的“泰坦”重型坦克:
2.电控硬件功能
2.1 主控板:
2.1.1 电机驱动:
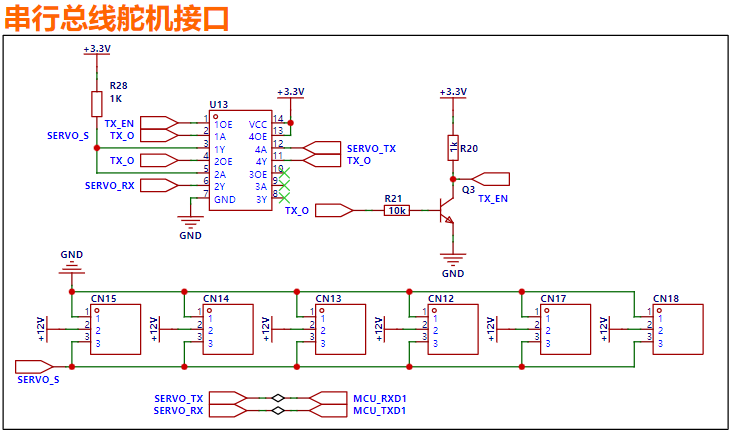
- 6路串行总线舵机接口:PH2.0-3P,74HC126D
- 4路直流电机驱动:TB6612FNG
2.1.2 指示器件:
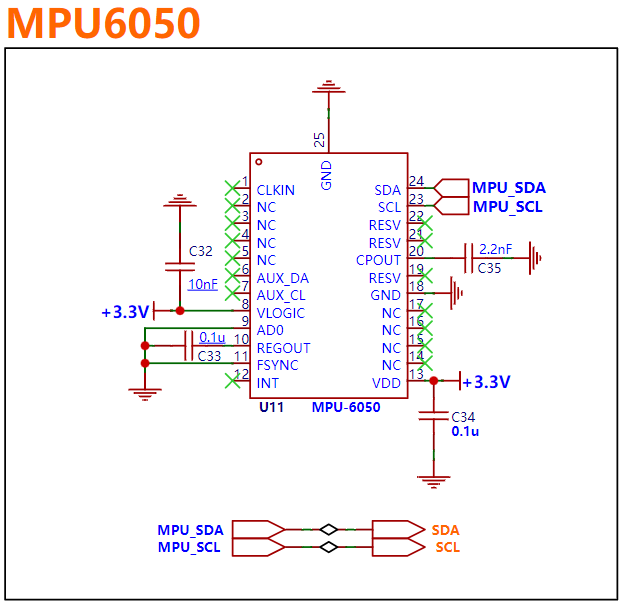
- 1颗 六轴加速度传感器:MPU6050
- 1块 拨轮编码器:MITSUMI
- 1颗 普普通通的 微型无源蜂鸣器:DET402-G
- 1颗 普普通通的 发光LED:0603
- 1处 0.96寸4针OLED屏幕接口:HDR-1*4P-F
- 3颗 普普通通的 RGB灯珠:WS2812B-2020
2.1.3 拓展接口:
- 2路拓展IIC接口:PH2.0-4P
- 1路WS2812B灯珠接口:HDR-M-2.54-3P
2.2 拓展板:
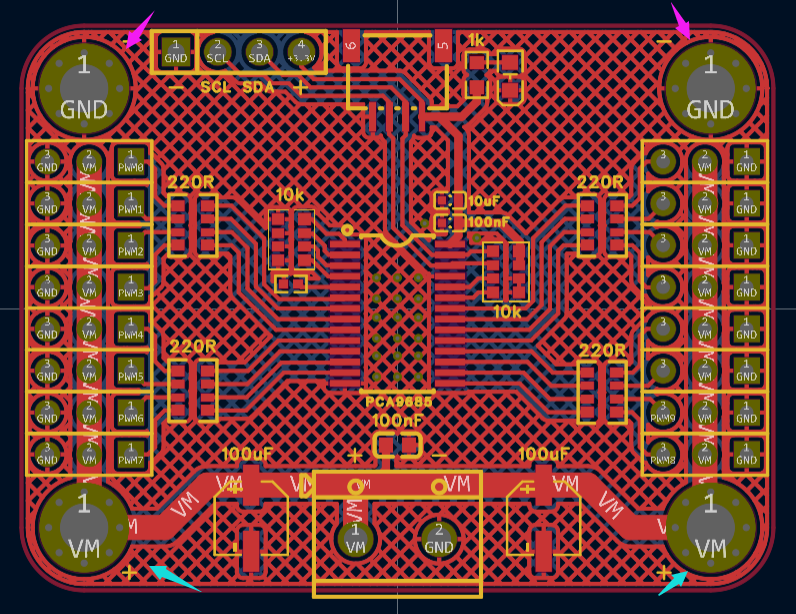
- 16路PWM舵机驱动:PCA9685
3.选型简述
3.1 电机选型:
-
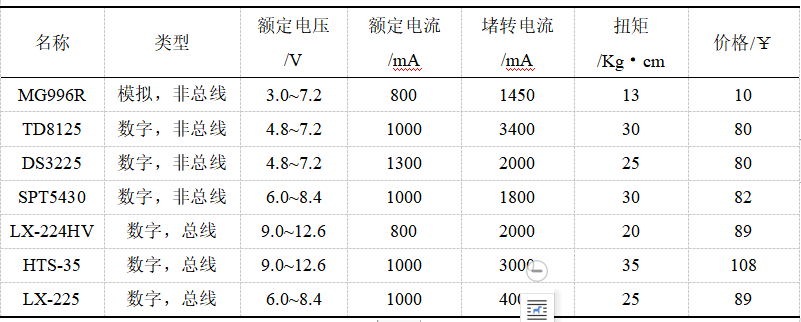
串行总线舵机选型:型号:HTS-35H,额定电压:9.0~12.6V,串行通信波特率115200,额定扭矩:35kg.cm/3.5N.m。通信需要将UART全双工转半双工,根据幻尔舵机商家提供的通信协议手册和原理图,采用74HC126D实现;
<center class="half">

</center> -
PWM舵机选型【经济方案】:型号:MG996R,额定扭矩:13kg.cm/1.3N.m。常见的大舵机,配合拓展板也没什么问题,箭头处注意供电电压是否匹配。(注意供电连接,主控板与拓展板可通过铜柱连接电源)
<center class="half">

</center> -
PWM舵机拓展控制板;
<center class="half">

</center> -
直流电机选型:型号:JGA25-370-1260,额定电压:12.0V,减速比:1:103,空载转速:60转/分钟。主控V1.0版本中,采用TB6612FNG驱动【考虑到停产及价格问题,V2.0已用RZ7899替代】;
<center class="half">


</center>








3.2 其他选型:
- 六轴加速度传感器:MPU6050。通常选择,源代码中定义支持了采用DMP获取四元数后,再解算得Pitch、Roll角(yaw角太飘),而且QFN封装可能不太好焊。~~~~
<center class="half">
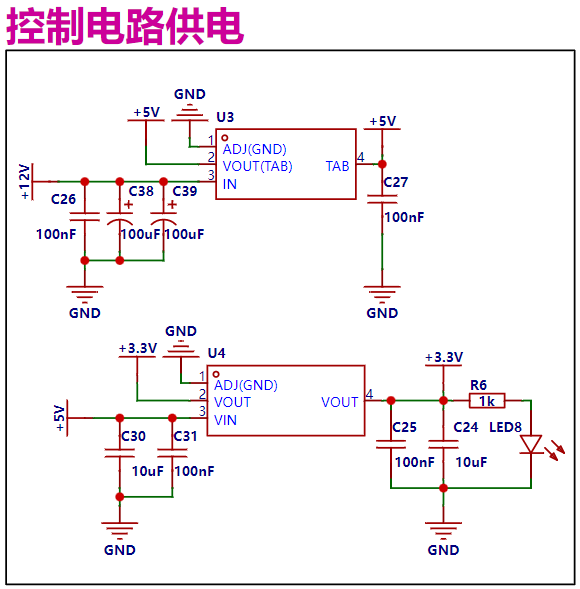
</center> - 芯片供电:3.3V与5V供电均采用LDO实现,即SCJT1117-3.3与SCJT1117-5.0。(由于压差较大,建议贴散热片)
<center class="half">
</center> - 电源选型:采用放电倍率35C的3S聚合物航模电机,但考虑到安全问题,经测试3节放电倍率10C的18650动力锂电池也能驱动
<center class="half">


</center>




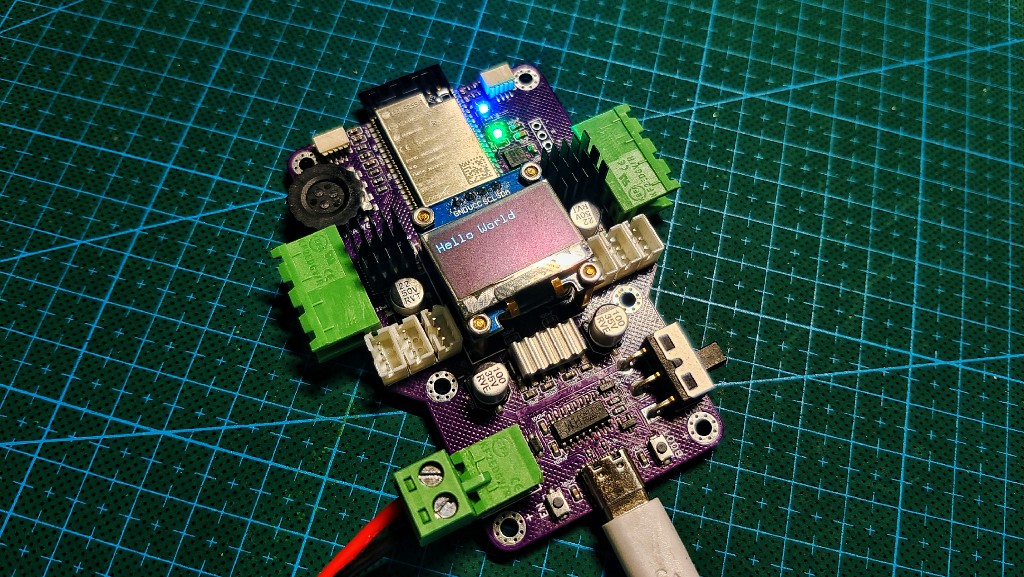
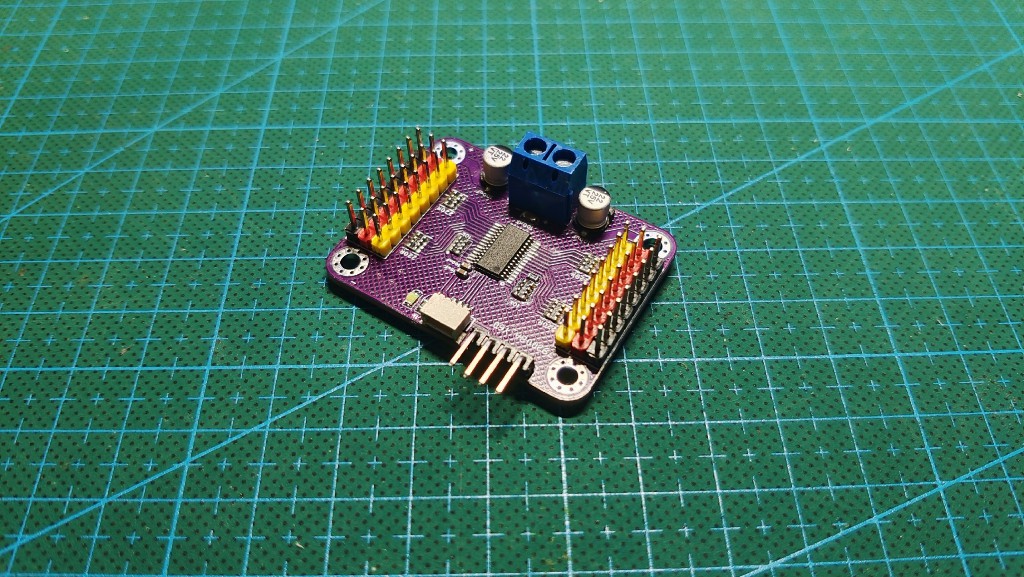
4.实物图片
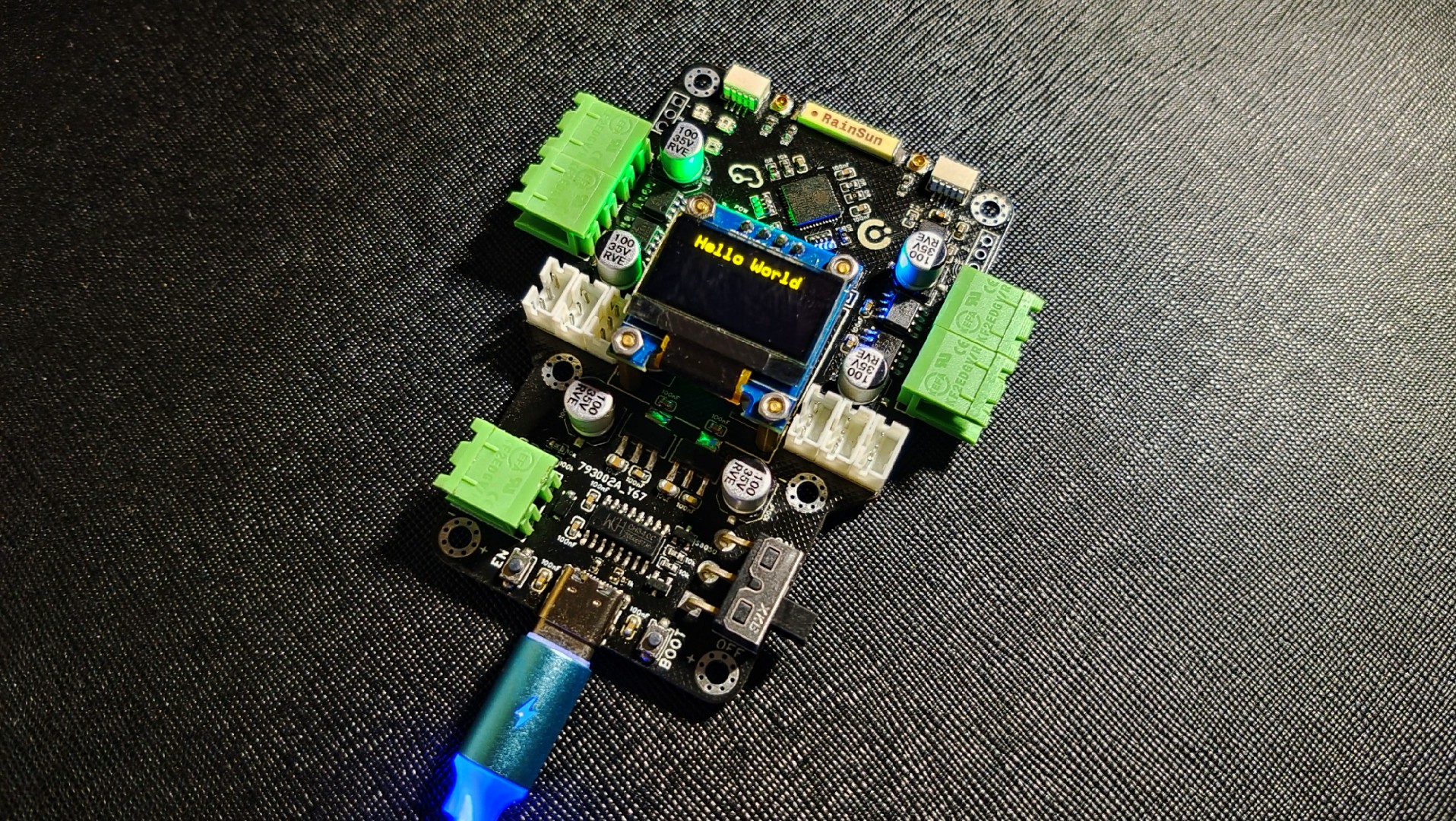
主控板:
16路PWM舵机---拓展板:
组合图:
5.机械结构设计
所述机器人整体总重量(加电源)经称量可达3.0kg。
目前大部分结构零件以FDM式3D打印技术制造,采用PLA材质,故主要参数推荐:0.15mm层高,70%填充。部分需要少量支撑零件,如履带外壳——主壳、提手、躯体前侧板等
设计特点:
- 履带足
- 二自由度串联腿
- 四足形态:8自由度
- 履行模式:4电机驱动
- 预留二自由度云台
- 3D打印结构

6.控制系统软件设计
VSCode+PlatformIO平台开发,目前机器人主控系统主要包括2部分:底层驱动,运动控制。
6.1 底层驱动内容:
- 串行总线舵机通信
- 直流电机驱动
- 六轴加速度传感器通信
- OLED屏幕驱动
- 拨轮编码器读取
- WS2812B-RGB灯珠驱动
- 蜂鸣器驱动
- WiFi通信配置
6.2 运动控制内容:
- 单腿正解FK
- 单腿逆解IK
- 姿态逆解
- 足端摆线轨迹计算
- Trot步态模式
- Walk步态模式
- *VMC算法 -- 伪闭环(待测试)
6.3 代码文件说明:
lib:
- Adafruit_NeoPixel: WS2812B灯珠驱动控制(有点小bug,第1个灯珠有些不受控制,待更改)
- Adafruit_PWM_Servo_Driver_Library: PCA9685通信及驱动库
- MPU6050:加速度传感器
- U8g2:用于0.96寸 OLED屏幕驱动
src/Drive:
- Hiwonde.h/.cpp: 串行总线舵机通信库
- ServoDrive.h/.cpp: PWM舵机驱动控制库(PCA9685)
- IOs.h/.cpp: GPIO引脚配置及控制库
- IMU.h/.cpp: MPU6050加速度传感器通信库
- DCMotorDrive.h/.cpp: 直流电机驱动控制库
src/Dynamics:
- FKIK.h/.cpp: 单腿正逆解库
- MotionControl.h/.cpp: 机器人运动及姿态控制库
7.远程控制App设计
注意:需要开启定位、通知权限
设计特点:
- 基于Android端开发
- 采用WIFI作为无线通讯模式
- 采用TCP作为传输层协议
8.实物样机~~~~


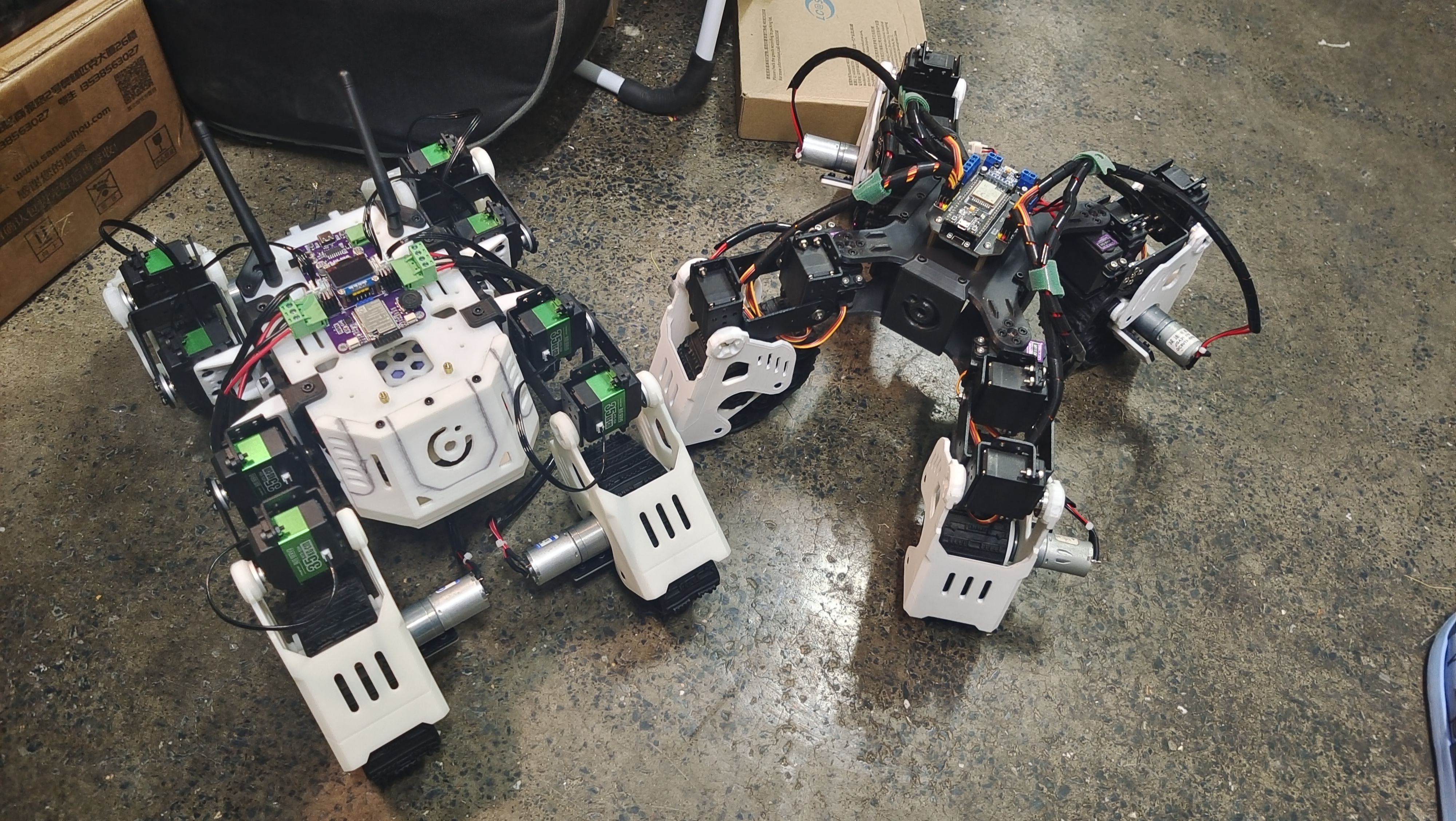
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









