

专业版
平衡车3.0
639
0
0
0
简介
本项目是一款基于STM32F103C8T6单片机设计的智能循迹平衡车
简介:本项目是一款基于STM32F103C8T6单片机设计的智能循迹平衡车复刻成本:¥300
开源协议
:GPL 3.0
创建时间:2025-06-04 17:51:00更新时间:2025-06-05 09:26:27
描述
项目简介
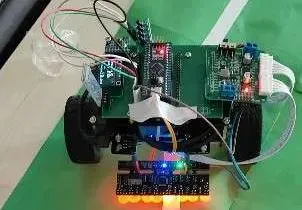
本项目是一款基于STM32F103C8T6单片机设计的智能循迹小车,具备自主平衡、循迹、蓝牙遥控等功能。通过集成MPU6050传感器实现姿态监测与平衡控制,利用循迹传感器完成路径追踪,并借助蓝牙模块实现实时遥控操作,适用于智能小车竞赛、自动化巡检等场景。
项目功能
-
循迹功能:利用红外循迹传感器阵列检测地面轨迹,实现自动沿预设路线行驶。
-
自主平衡:依靠MPU6050传感器实时监测车身姿态,通过PID算法控制电机调节车身平衡。
-
蓝牙控制:集成HC-05蓝牙模块,支持通过手机APP或蓝牙串口终端发送指令控制小车行动。
-
速度调节:根据循迹状态和平衡需求,动态调整电机转速,确保小车稳定运行。
项目参数
-
控制芯片:STM32F103C8T6,负责执行所有控制算法并协调各模块运行。
-
传感器:MPU6050六轴传感器用于姿态监测,红外循迹传感器阵列用于路径识别。
-
驱动系统:tb6612双路电机驱动模块控制小车运动。
-
通讯模块:HC-05蓝牙模块,支持4.0蓝牙协议,通信距离可达10米。
-
电源系统:12V锂电池供电,搭配稳压芯片为各模块提供稳定电压。
原理解析(硬件说明)
电机驱动电路
使用tb6612双路电机驱动芯片,能够提供高达2A的持续电流,满足小车电机的驱动需求。STM32通过PWM信号控制电机的转速和方向,实现小车的前进、后退、左转、右转等动作。在电机驱动电路中添加续流二极管,保护控制芯片免受电机反向电动势的损害。
传感器电路
MPU6050传感器通过IIC总线与STM32连接,实时传输加速度和角速度数据。红外循迹传感器阵列由8个发射接收对管组成,检测地面黑白反光差异实现循迹功能。传感器信号经整形电路处理后,以数字信号形式传输至STM32的GPIO引脚。
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论