



分类
技术干货
2025全国大学生电子设计大赛K题-自动避障小车-(全网行进速度最快)
简介
基于 K230与STM32的视觉导航小车,融合YOLO11识别、A*路径规划与双闭环控制,实现黑白柱检测、地图构建与自主避障导航的完整嵌入式智能系统。
简介:基于 K230与STM32的视觉导航小车,融合YOLO11识别、A*路径规划与双闭环控制,实现黑白柱检测、地图构建与自主避障导航的完整嵌入式智能系统。【2025电赛K题开源】基于 K230 + STM32 的视觉导航自动避障小车
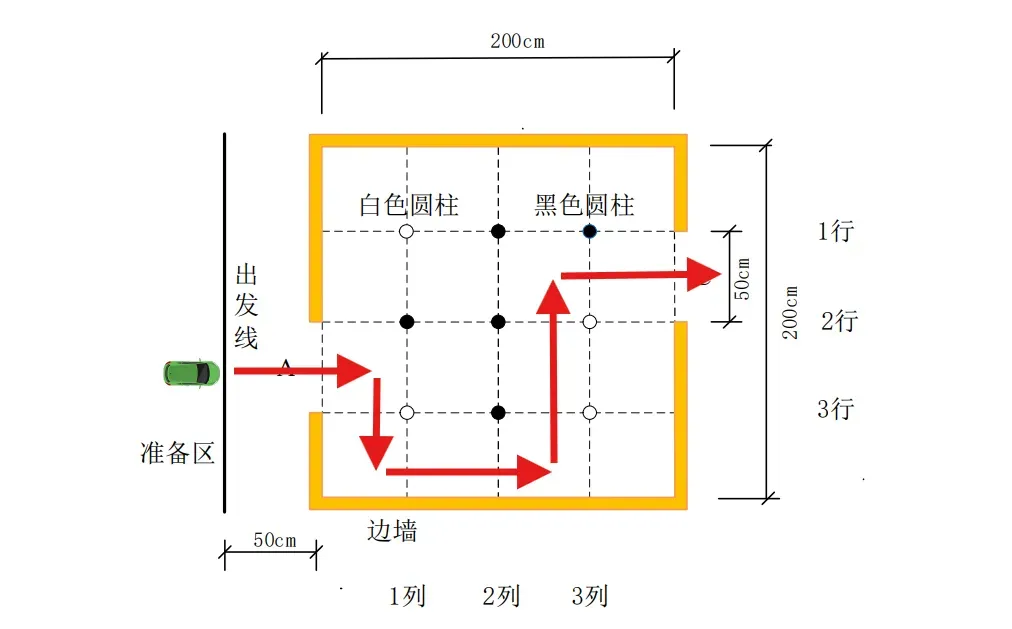
这是一辆为 2025 全国大学生电子设计竞赛 K 题设计的视觉导航避障小车。
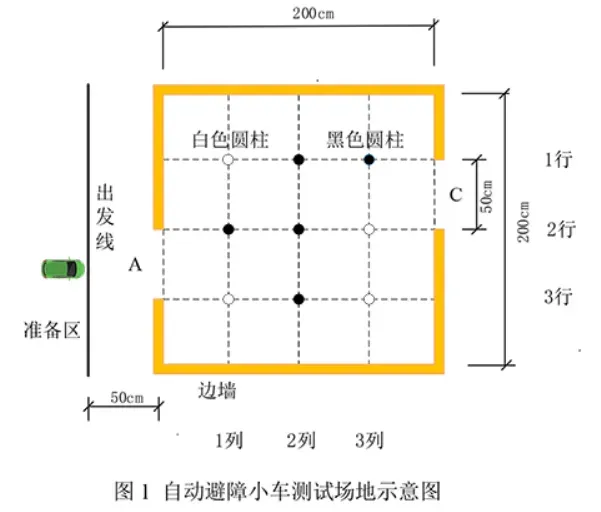
它要完成的任务并不只是“能跑”,而是要在随机摆放黑白圆柱的九宫格场地中,自己看懂赛场、生成地图、选择路线,并稳定避障到达目标区域。
项目最终采用 K230 + STM32F407 双处理器架构:K230 负责视觉识别和路径决策,STM32 负责底盘控制和状态执行。视觉端使用 YOLO11 识别黑白柱,控制端使用编码器反馈和双闭环控制,让小车从“看得见”真正走到“走得准”。
项目已完整开源
GitCode:https://gitcode.com/Embodied-AI-Workshop/Auto_Hide_Car
演示视频:
BillBill:https://www.bilibili.com/video/BV17XTu65Esx/
1. 项目亮点
这个项目比较有意思的地方在于,它不是单独验证某个算法,而是把视觉、规划、通信、控制和整车联调都串成了一个闭环。
| 亮点 | 说明 |
|---|---|
| K230端AI识别 | 使用 YOLO11 识别黑柱、白柱,减少光照变化对识别的影响 |
| 九宫格地图构建 | 根据检测框中心点聚类,自动生成赛场地图 |
| Route路径模板 | 将路径规划简化为稳定路线选择,降低底盘执行难度 |
| STM32双闭环控制 | 位置 PD + 速度 PI,让小车走得更稳 |
| 状态机异常恢复 | 增加超时、fallback 和恢复机制,避免整车联调时卡死 |
一句话概括:
K230负责看懂赛场,STM32负责把路线稳稳跑出来。
2. 项目效果
小车上电后的完整流程如下:
摄像头采集
-> YOLO11识别黑白柱
-> 生成九宫格地图
-> 路径决策
-> UART发送运动指令
-> STM32执行双闭环控制
-> 自主完成避障导航

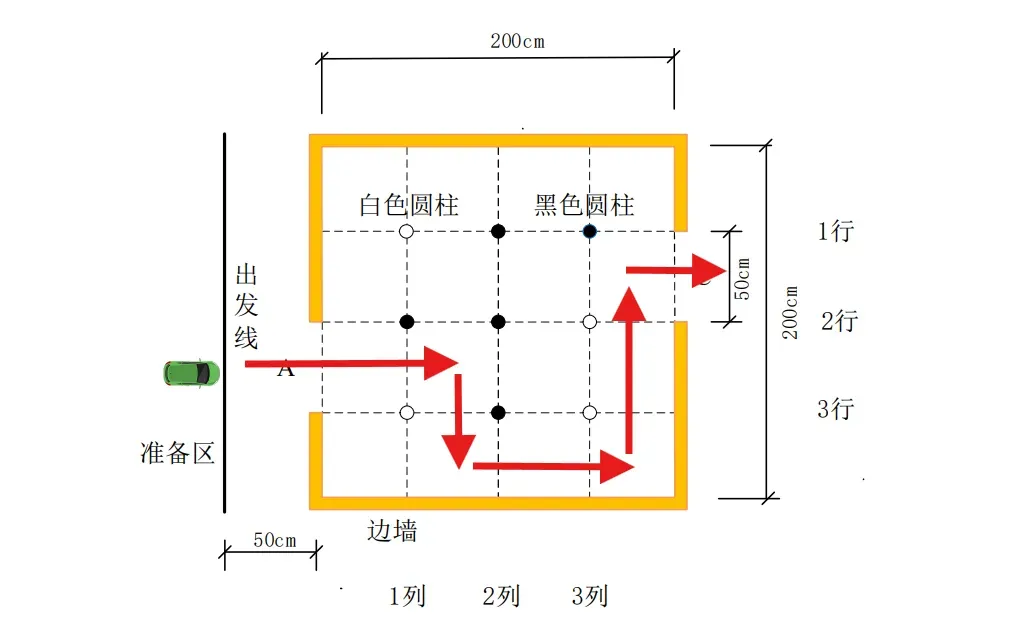
赛题场地为固定 3x3 九宫格区域,黑白圆柱随机放置。小车需要自动识别柱子位置,建立地图,规划或选择通行路线,并避开障碍物行驶至目标区域。
3. 系统架构
项目采用双处理器架构:
| 模块 | 主要职责 |
|---|---|
| K230 | 摄像头采集、YOLO11推理、目标坐标提取、九宫格地图生成、路径决策 |
| STM32F407 | UART接收、状态机调度、编码器采样、PD/PI控制、电机驱动 |
这样分工的核心原因很直接:视觉计算量大,底盘控制又特别吃实时性。如果把所有任务都压在一个处理器上,视觉推理一旦卡顿,控制周期就会抖,小车轨迹也会跟着飘。
所以我们把系统拆成两层:
- K230 做“上层感知和决策”;
- STM32 做“底层控制和执行”。
系统主流程:
摄像头
-> YOLO11识别
-> 目标中心点提取
-> 九宫格地图生成
-> 路径决策
-> UART通信
-> STM32状态机
-> PD位置环
-> PI速度环
-> 电机驱动
-> 编码器反馈
-> 回到控制闭环
4. 硬件组成
| 模块 | 型号 / 说明 |
|---|---|
| AI视觉处理器 | K230 |
| 主控 | STM32F407VET6 |
| 摄像头 | OV5640 |
| 电机 | 四驱减速电机 |
| 编码器 | 霍尔编码器 |
| 电源 | 2S锂电池 |

为什么选择 K230
项目初期考虑过 OpenMV 和树莓派,但最终放弃:
- OpenMV 做颜色阈值识别时,对光照、阴影和反光非常敏感;
- 树莓派性能足够,但功耗、体积和现场部署成本更高;
- K230 自带 AI 加速能力,适合部署 YOLO 类目标检测模型。
所以视觉端最终选择 K230,将黑白柱识别问题从“调阈值”转为“目标检测”。
为什么选择 STM32
底盘控制最重要的是实时性。STM32 定时器、PWM、编码器接口和中断资源成熟,适合承担运动控制和状态执行任务。视觉结果由 K230 计算,STM32 只接收明确的运动指令并稳定执行。
5. 视觉识别与地图构建
从颜色识别到 YOLO11
最开始我们也走过很常见的路线:HSV 阈值分割、颜色检测、简单规则判断。实验室里看起来没问题,甚至还会给人一种“这题好像不难”的错觉。
但一换到真实场地,问题立刻出现:
- 光照变化会导致阈值失效;
- 阴影会让白柱和地面混在一起;
- 反光会带来误检;
- 遮挡和视角变化会让规则方法不稳定。
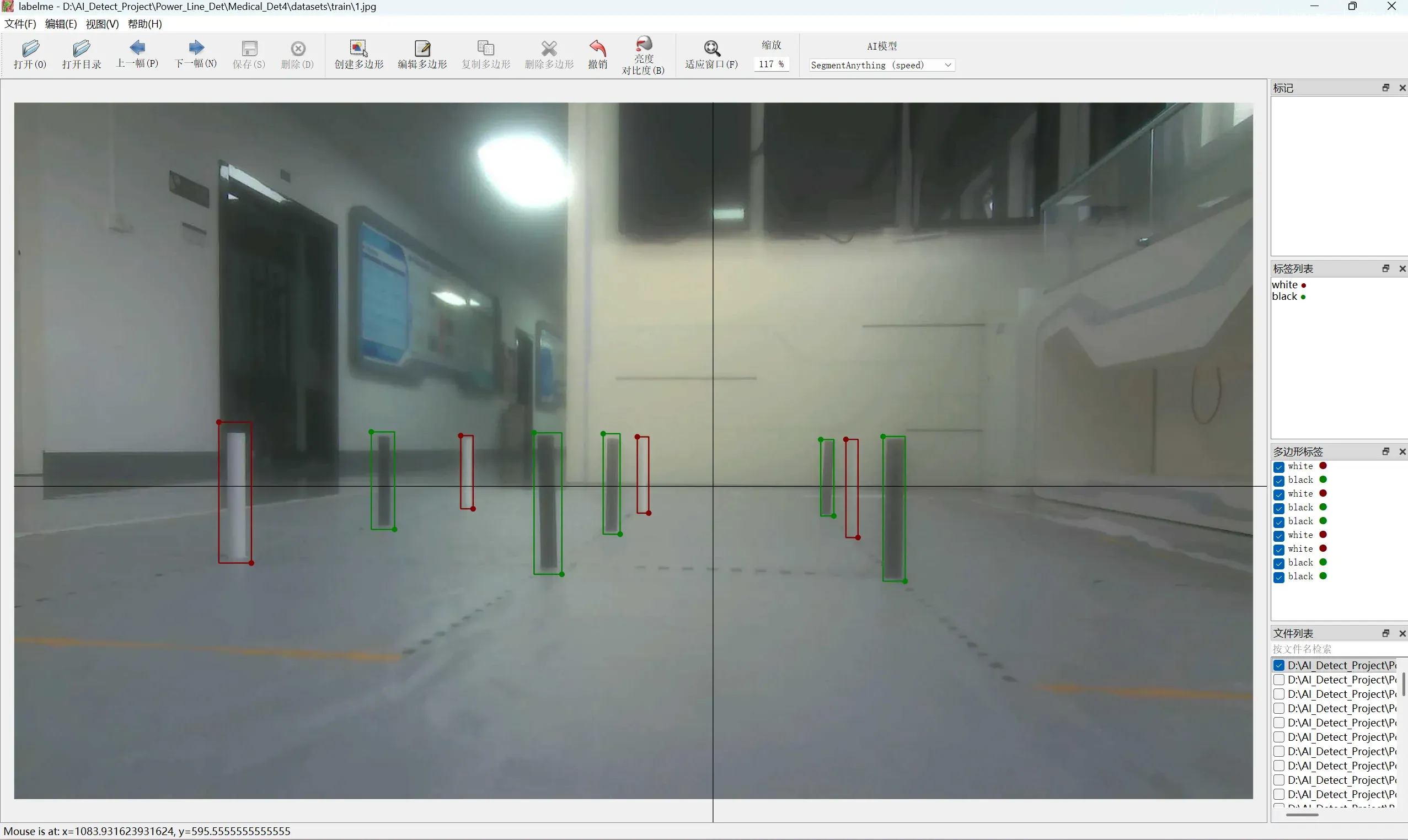
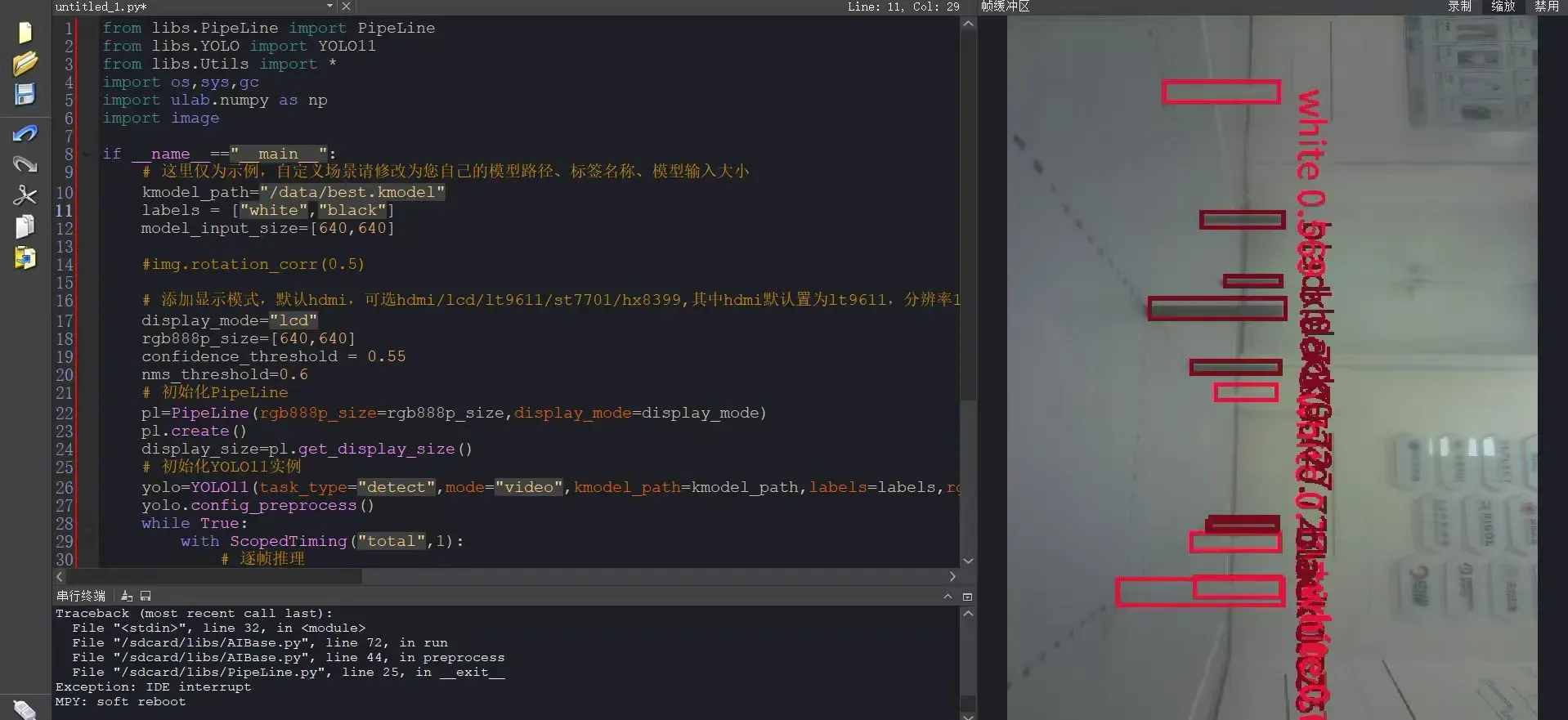
也就是说,颜色识别不是完全不能用,而是太依赖现场环境。为了让系统更稳,最终改用 YOLO11 目标检测方案,只训练两个类别:
black pillar
white pillar
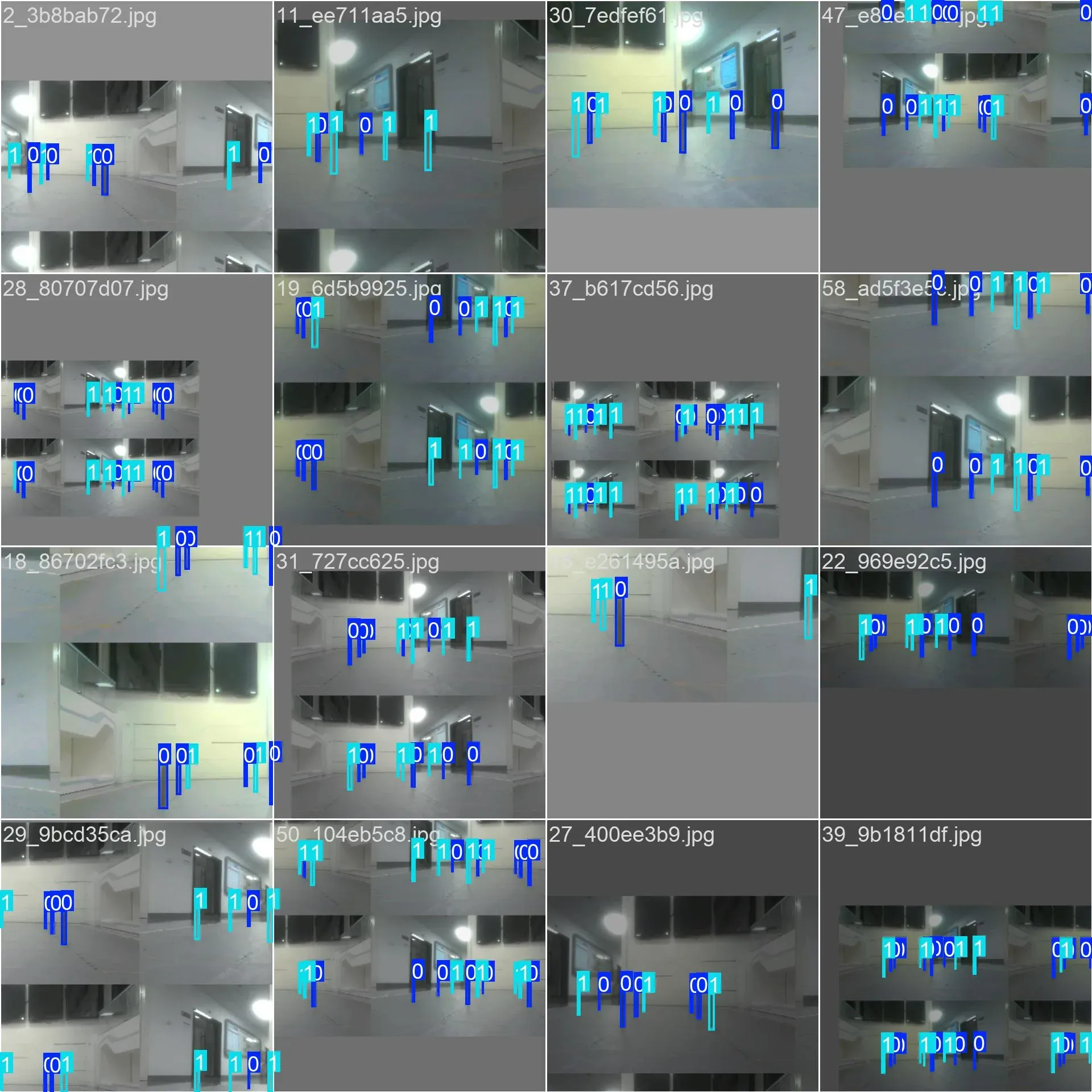
识别流程:
摄像头采集 -> YOLO11推理 -> NMS去重 -> 输出检测框 -> 提取中心点 -> 生成九宫格地图
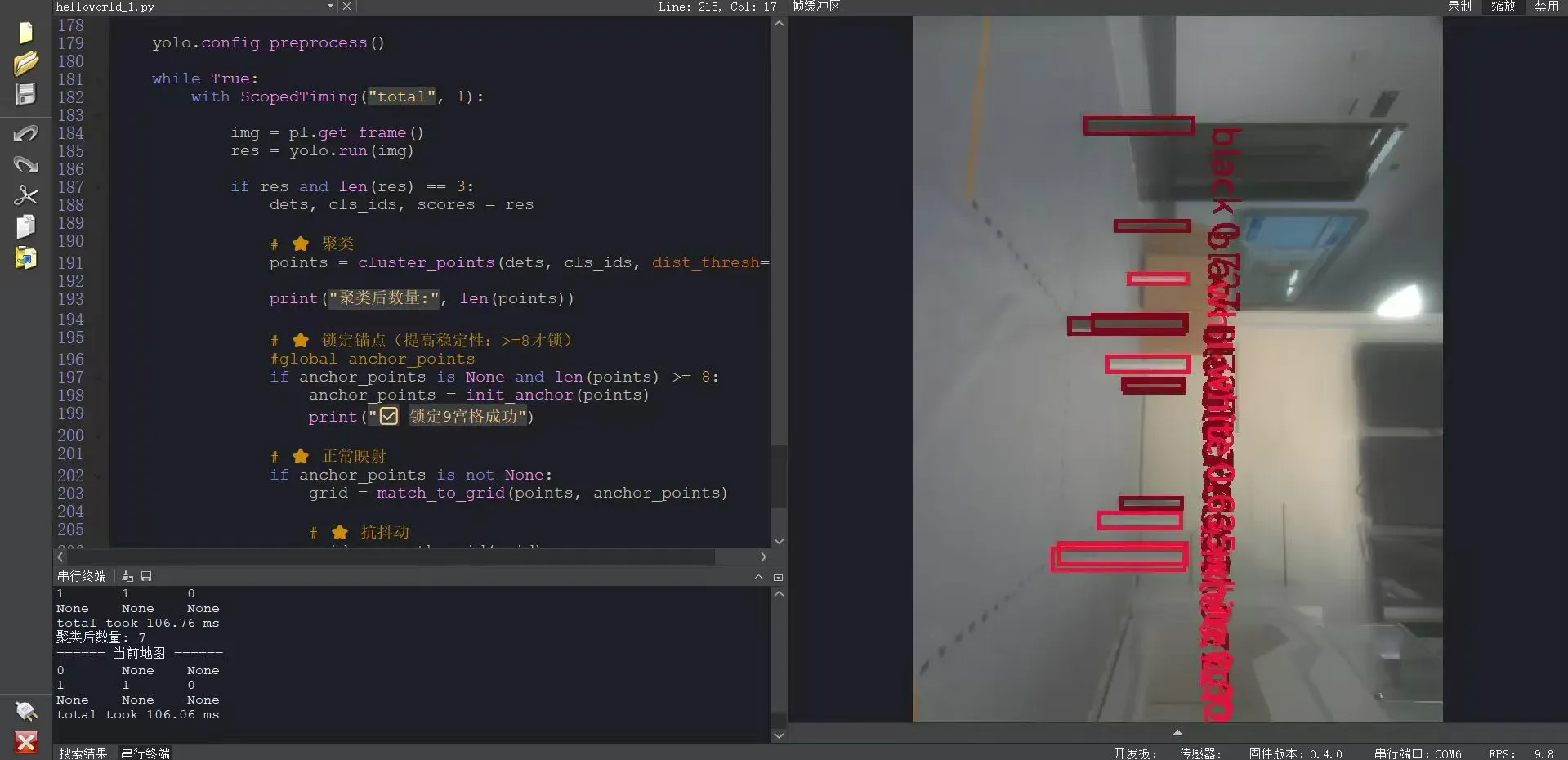
最大的问题:斜视摄像头
比赛中摄像头安装在小车前方,看到的是斜视图,而不是俯视图。
这是整个项目里最容易被低估的问题之一:YOLO 的检测框明明是对的,但九宫格地图还是会错。
原因在于,斜视画面存在透视关系。远处柱子的像素距离会被压缩,近处柱子的间距会被拉大。如果直接按 X 或 Y 坐标排序,就会把真实空间里的格子顺序排乱。

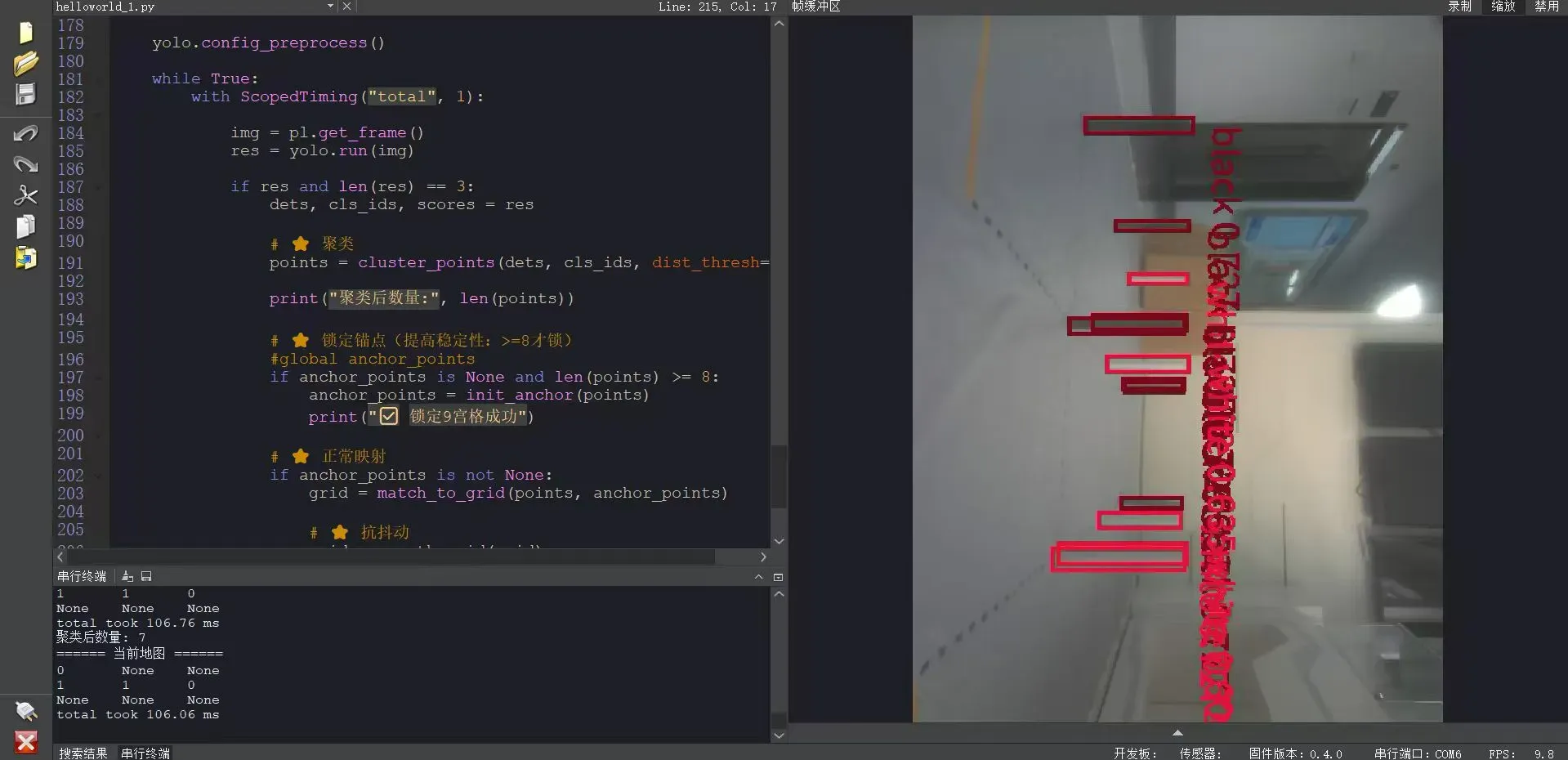
最终采用自适应聚类方法,根据目标中心点的空间分布自动分组,再生成九宫格状态。这个改动之后,识别结果才真正从“检测框正确”变成“地图正确”。
九宫格生成流程:
检测结果 -> 提取中心点 -> 自适应聚类 -> 行列映射 -> 九宫格地图
示例地图输出:
white black white
black white black
black black white
这部分是整个视觉系统中最关键的工程问题之一。目标检测解决的是“看见柱子”,九宫格映射解决的是“理解柱子在赛场中的真实位置”。
6. 路径决策方案
项目中尝试过两类路径方案:A* 路径规划和规则 Route 模板。
A* 路径规划
A* 的思路是将九宫格建模为图结构,把黑色柱子视为不可通行节点,通过启发式函数搜索从起点到终点的路径。
A* 搜索流程:
开始 -> Open表 -> 取最小F节点 -> 扩展相邻节点 -> 到达终点 -> 生成路径

A* 的优点是泛化能力强,理论上能处理更多障碍分布。但在实际小车系统里,算出路径只是第一步,底盘能不能稳定执行才是更现实的问题。
对于固定九宫格赛题,完全动态的路径输出会让控制端面对更多变化,调试成本也会增加。
规则 Route 模板
为了提高稳定性,后续方案将路径搜索问题简化为规则决策问题:K230 根据九宫格状态直接选择预定义路线,STM32 只负责执行对应轨迹。
这个思路听起来没有 A* 那么“通用”,但非常适合电赛:场地规则固定、目标明确、稳定优先。与其追求每次都算一条理论最优路径,不如把路线模板提前调稳,让小车每次都按熟悉的轨迹走。
| 对比项 | A*路径规划 | 规则Route模板 |
|---|---|---|
| 决策方式 | 图搜索 | 规则映射 |
| 输出结果 | 动态路径 | Route编号 |
| 实时性 | 中等 | 高 |
| 控制端执行 | 路径变化较多 | 轨迹固定、易调试 |
| 适用场景 | 障碍分布复杂 | 固定九宫格任务 |
Route 层最终保留四类路线:
| Route | 作用 | 典型场景 |
|---|---|---|
| Route1 | 左绕路线 | 左侧通道优先 |
| Route2 | 右绕路线 | 右侧通道优先 |
| Route3 | 直行或轻微调整 | 前方通畅或轻度障碍 |
| Route4 | 备用绕行路线 | 复杂或不确定场景 |
四条预定义路线如下:
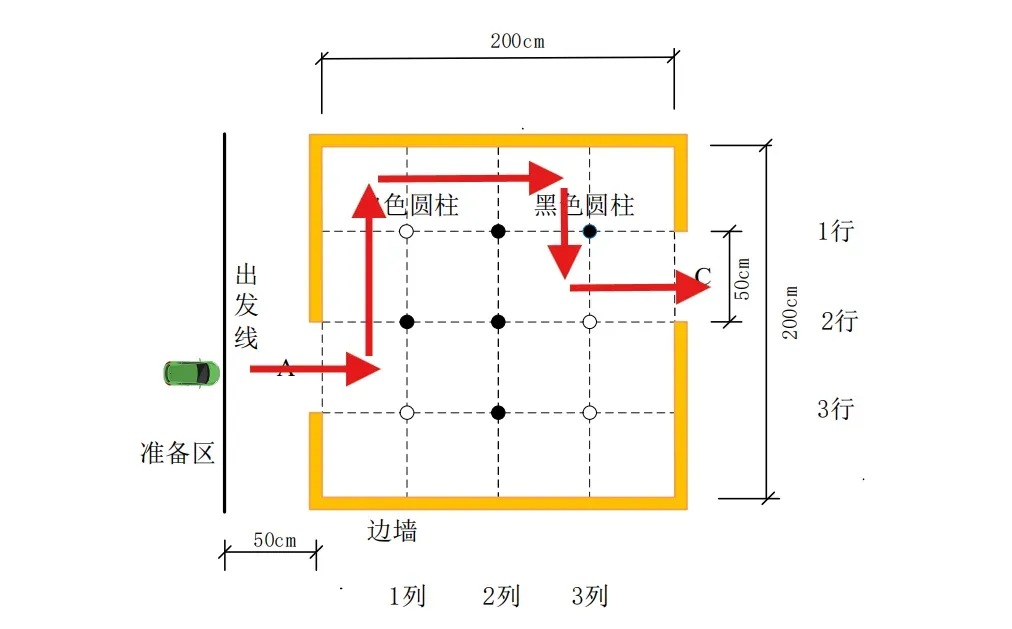
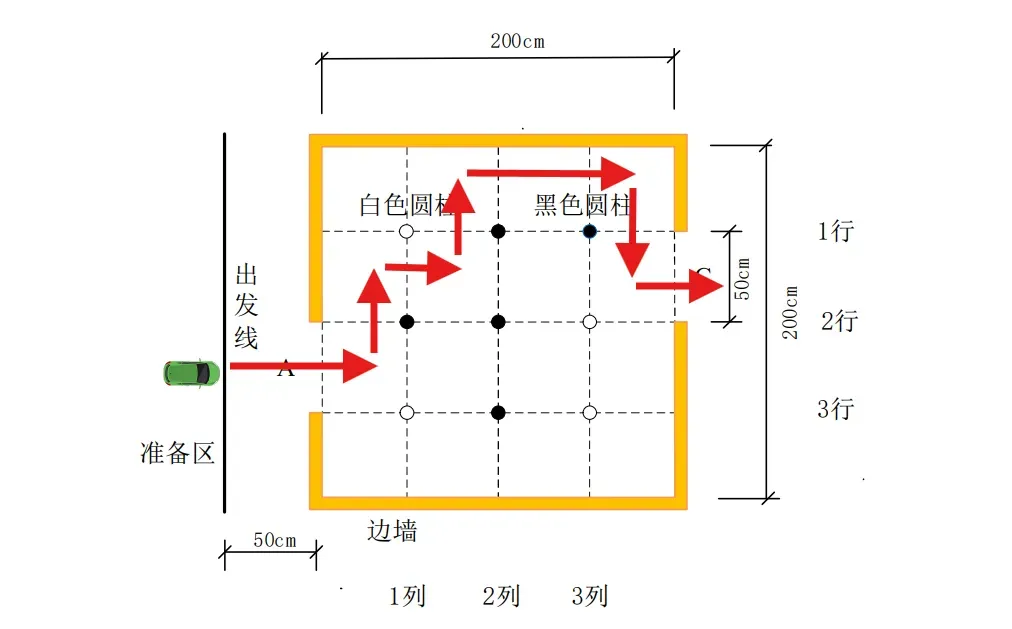
核心判断区域是前方三格:
front = current_map[6:9]
常见规则示例:
[0, 0, 0] -> Route3
[1, 1, 1] -> 根据左右通道选择 Route1 / Route2 / Route4
[1, 0, 0]、[0, 1, 0]、[0, 0, 1] -> 结合左右列状态选择绕行或微调
规则 Route 模板的本质,是把“路径规划问题”降维为“有限规则决策 + 稳定轨迹执行”。对于电赛这种规则明确、场地固定的任务,这比追求通用最优路径更容易稳定落地。
7. STM32 运动控制
视觉和路径决策只能告诉小车“往哪里走”,真正决定比赛表现的是底盘能不能稳定、准确地走到目标位置。
这一部分也是从“能跑”到“能比赛”的关键。刚开始小车能动起来会很开心,但真正联调时才会发现:能动不代表能走准,能走准不代表每次都稳定。
实际调试中遇到的主要问题包括:
- 电机非线性;
- 地面摩擦变化;
- 编码器噪声;
- 转向惯性;
- 左右轮响应不一致。
这些问题会让理论路径和实际轨迹产生明显偏差。
第一版:单环 PID
最初方案是直接用位置误差控制 PWM:
目标位置 -> PID -> PWM -> 电机
这一版最大的优点是简单,小车确实能动起来;最大的问题也是简单,轨迹偏移严重,到点后容易抖动,无法稳定停车。问题在于位置误差被直接转换为电机输出,中间缺少速度约束,控制过于粗暴。
第二版:位置 PID
加入编码器位置反馈后,小车的位置控制有所改善,但仍然存在超调、回摆和 S 型修正问题。根本原因仍然是控制结构缺少速度层,位置误差一大,输出就容易过激。
第三版:位置 PD + 速度 PI 双闭环
最终稳定方案采用双闭环控制。它的思路是先由位置环算出“应该跑多快”,再由速度环把电机速度稳住:
目标位置
-> 位置误差
-> PD位置环输出目标速度
-> 速度误差
-> PI速度环输出PWM
-> 电机执行
-> 编码器反馈
双闭环控制流程:
目标位置
-> PD位置环
-> 目标速度
-> PI速度环
-> PWM输出
-> 电机
-> 编码器反馈
-> 回到位置环和速度环
位置环负责“该往哪里走”,速度环负责“以什么速度稳定地走”。PD 位置环避免积分带来的位置振荡,PI 速度环用于消除电机速度稳态误差。这个结构比单环 PID 更容易调参,也更适合四驱小车的实际运动。
8. 关键踩坑总结
下面这些问题基本都是整车联调时一点点踩出来的。单看代码时不一定明显,但一上车跑,问题就会非常真实地表现出来。
| 问题 | 现象 | 根本原因 | 最终解决方案 |
|---|---|---|---|
| 颜色识别不稳定 | 光照变化后误检、漏检 | HSV阈值强依赖环境 | 改用 YOLO11 目标检测 |
| 九宫格映射错位 | 检测框正确,但地图顺序错误 | 摄像头斜视导致坐标非线性 | 使用自适应聚类生成九宫格 |
| 转向严重过冲 | 左右来回摆动,难以对准 | 单环控制过激,未处理惯性 | 分阶段控制,降低过冲 |
| 积分项导致震荡 | 到点后持续抖动 | 积分累积和编码器噪声被放大 | 限幅积分、误差死区、必要时冻结积分 |
| 状态机偶发卡死 | 小车停止运动但无明显报错 | 状态切换条件不完整,异常无出口 | 增加超时、watchdog 和 fallback 状态 |
这些问题说明:机器人系统不是单个算法正确就能稳定运行。视觉、路径、通信、控制和状态机必须一起闭环,任何一个环节不稳定,最终都会体现在车辆行为上。
9. 开发过程复盘
项目整体经历了五个阶段:
| 阶段 | 目标 | 结果 |
|---|---|---|
| 颜色识别验证 | 快速让小车识别柱子 | 实验室可用,真实环境失败 |
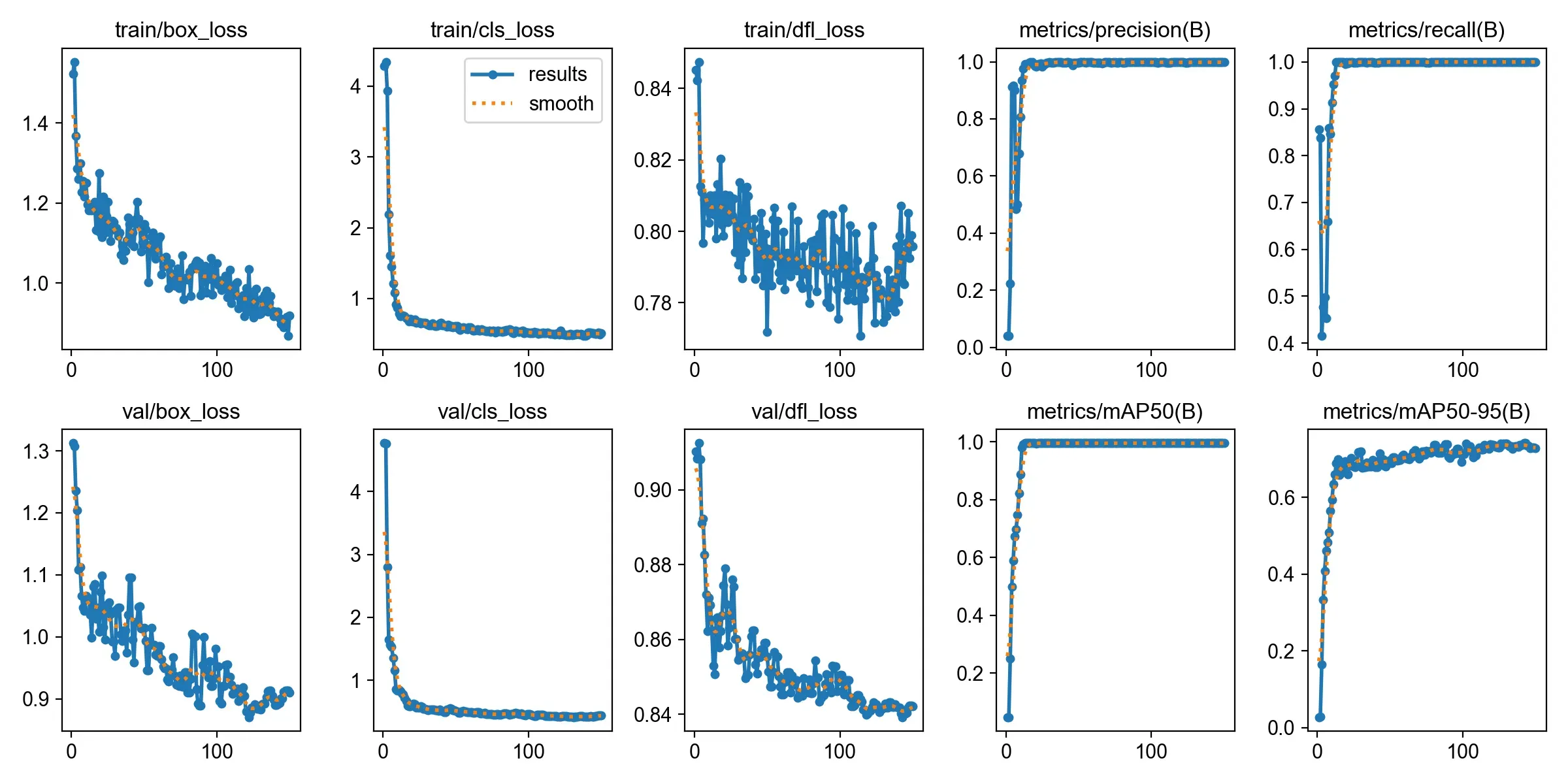
| 引入 YOLO11 | 提高视觉鲁棒性 | 识别稳定性明显提升 |
| 地图构建 + A* | 让小车自动找路 | 路径能算出,但执行不够稳定 |
| Route模板 + 双闭环 | 提高运动稳定性 | 路线执行更可控 |
| 整车联调 | 解决通信、状态机和异常恢复 | 系统稳定完成任务 |
回头看,整个项目不是一次性设计出来的,而是被问题一步步推着改出来的。最重要的认识是:
算法正确 != 系统稳定
在真实小车上,能跑起来只是第一步。真正困难的是让系统在光照变化、摩擦变化、通信延迟和控制误差存在的情况下,仍然保持可恢复、可调试、可重复运行。
10. 开源资料
项目开源内容包括:
- K230 端源码;
- STM32 端源码;
- YOLO11 模型;
- 数据集;
- 原理图;
- 技术文档;
- 调试记录。
开源地址:
https://gitcode.com/Embodied-AI-Workshop/Auto_Hide_Car
11. 总结
这个项目把 AI 视觉、地图构建、路径决策、嵌入式控制和整车联调完整串在了一起。前期看起来只是“识别柱子并避障”,真正做起来才发现,它本质上是一套小型机器人系统。
最终方案可以概括为:
K230负责看懂赛场
STM32负责稳定执行
YOLO11解决识别鲁棒性
聚类映射解决九宫格定位
Route模板降低路径执行难度
双闭环控制保证底盘稳定
希望这份开源项目能给后续做电赛、智能车和机器人方向的同学一些参考,也欢迎交流和改进。




评论