



外卖自提柜设备端主控
简介
外卖自提柜,类似蜂巢之类的快递柜。 基本功能包括与服务器通信,控制开柜,显示信息,声音提示,验证码输入等等。
简介:外卖自提柜,类似蜂巢之类的快递柜。 基本功能包括与服务器通信,控制开柜,显示信息,声音提示,验证码输入等等。开源协议
:Public Domain
描述
原文在CSDN
项目实战-外卖自提柜 2. CubeMX + FreeRTOS入门
项目实战-外卖自提柜 3. FreeRTOS主要API的应用
项目实战-外卖自提柜 4. FreeRTOS 堆栈分配、调试技巧
项目实战-外卖自提柜 5. ESP8266 01S配置与掉线处理
项目介绍
外卖自提柜,类似蜂巢之类的快递柜。
工作流程:
- 外卖员通过手机APP扫描柜体上面的固定二维码,在APP中输入客户的手机号
- 完成后,服务器向对应手机号发送含有取货密码的短信
- 同时自动分配一个空柜子,向设备端发送一个开柜指令,内容包括,柜号、开柜密码等
- 设备端收到开柜指令后开柜
- 客户收到短信后凭密码取外卖,取完后设备端上报服务器取货成功的信息。
基本功能包括与服务器通信,控制开柜,显示信息,声音提示,验证码输入等等。
服务器和APP是别人做的,我做设备端,柜体用下面这种。

方案选型
方案:
MCU + WIFI模块 + GPRS模块 + 显示屏 + 键盘
选型:
stm32f103rbt6 + esp8266 + sim800 + lcd彩屏 + 矩阵键盘
一开始觉得这个项目so easy 烂大街 ,乍一看确实,这选型也太烂大街了(笑),如果说这是一道电赛题,几天也能弄出来,最后花了两个月左右...
工作流程
设备端主要工作流程如下:
- 硬件开机后与服务器连接,连接成功后,硬件自动向服务器发送注册指令, 包含本机的Id,服务器收到后会将该机器注册进来,进行监管。
- 当有客户想要存放时,会扫描硬件二维码获取机器Id,然后在App上打开某个格子,服务器会向该机器发送存货指令 , 包含要打开的机器Id,格子Id,存放模式,取货验证码等等,同时服务器会向取货的客户发送6位验证码短信。
- 机器接收到存柜存货指令后,尝试打开相应格子,并保存验证码,若打开成功,则发回给服务器开柜成功指令表示成功。否则返回开柜失败指令表示失败。
- 客户来取物品时,在机器上输入相应的六位密码,响应密码的格子就会自动打开,然后向服务器发送取货指令,报告格子被打开。
- 持续工作,设备需要每30s发送一次心跳指令。
协议制定
协议部分雏形是做服务器的同学定的,这部分直接导致系统从裸奔变成跑FreeRTOS。
帧头 + Length + CmdId + DevId + Content + FrameId + 校验和
| 成分 | 描述 |
|---|---|
| 帧头 | 0x0a 0x0a 0x0a 0x0a |
| Length | 指令字节数总长度,包括其本身和校验和,两个字节的无符号short类型,顺序为 [低字节,高字节] |
| CmdId | 指令的Id , 一个字节的无符号byte类型 |
| DevId | 目标设备的Id,两个字节的无符号short类型,顺序为 [低字节,高字节] |
| Content | 该条指令包含的详细信息 |
| FrameId | 每一帧的唯一Id,两字节无符号short类型,顺序为[低字节,高字节] |
| 校验和 | 一字节有符号byte类型 |
不同指令的Content不同:
- 注册帧000:设备向服务器发送的认证信息,在服务器上注册该设备
Content为空 - 回复帧001:回复数据正确
Content为空 - 心跳帧002:心跳保持
Content为空 - 存货开柜帧003:服务器向设备发送存货开柜指令
Content内容包含:
-CellId:机器格子的编号,要开启的格子。两个字节的无符号short类型,顺序为 [低字节,高字节]
-Mode:代表存储的模式(常温,保温,制冷),一个字节的无符号byte
-PassWord:表示存储密码,六个字节的char字符串,顺序即为密码顺序
-SendAddress:表示存件者的id,11个字节的电话号码,char字符串,顺序即为号码顺序
-ReceiveAddress:表示取件者的id,含义同上 - 开柜成功帧004:设备开柜成功
Content内容与指令003相同 - 开柜失败帧005:设备开柜失败
Content包含:
-SendAddress : 表示存件者的id,11个字节的电话号码,char字符串,顺序即为号码顺序 - 取货帧006:客户取货成功
Content包含:
-CellId:机器格子的编号,要开启的格子。两个字节的无符号short类型,顺序为 [低字节,高字节]
第一个任务
初步入门FreeRTOS以后,着重解决通信部分,重新梳理一下与服务器通信部分的需求:
设备端和服务器通信,发送方每发送一条指令,接收方都要在收到后返回一个应答帧,发送方收到应答帧后,才判断此次通信正常,若规定时间内未收到应答帧,则重新发送。
另外需要注意的是,发送方在等待接收方返回应答帧时,不能阻塞系统运行,也就是说,即便当前有一帧数据在等待应答,也不影响下一帧数据的发送,且理论上应该保证同时在等待应答的帧的数量不受限制。
根据上述需求,显而易见的,应当把每一帧的发送单独作为一个任务,这个任务对这一帧进行监听,并控制重发。只要系统还有足够的剩余栈,就可以不断地创建新的发送任务,这样就可以保证最大限度地使用硬件资源保证每一帧的通信“并行”。
刚好,FreeRTOS创建任务时是可以传入一个参数的,这个参数就可以传入我们要发送的数据。
第一个任务诞生了:
数据发送任务:
/**
* @brief 数据发送任务
* @note 需要向服务器发送一条指令时,就创建一个发送任务,特点是等待回复和重发时不会阻塞其他任务进行
* @param argument:要发送的数据
* @retval None
*/
void SendData_Task(void const * argument)
{
//待添加
for(;;)
{
//待添加
}
}
下面来构思函数体中要写些什么
首先,肯定是要发送数据了,发送数据之前,有一件事要考虑,由于传入的是argument是指针,这个任务在进行过程中,这个指针指向的内容很可能被其他任务更改,所先需要先申请空间来拷贝要发送的数据
再来回顾一下帧格式:
帧头 + Length + CmdId + DevId + Content + FrameId + 校验和
| 成分 | 描述 |
|---|---|
| 帧头 | 0x0a 0x0a 0x0a 0x0a |
| Length | 指令字节数总长度,包括其本身和校验和,两个字节的无符号short类型,顺序为 [低字节,高字节] |
| CmdId | 指令的Id , 一个字节的无符号byte类型 |
| DevId | 目标设备的Id,两个字节的无符号short类型,顺序为 [低字节,高字节] |
| Content | 该条指令包含的详细信息 |
| FrameId | 每一帧的唯一Id,两字节无符号short类型,顺序为[低字节,高字节] |
| 校验和 | 一字节有符号byte类型 |
我们通过上述的Length获取数据长度,然后用FreeRTOS提供的API:
pvPortMalloc 申请内存,这个函数与C语言的malloc的区别是,前者从FreeRTOS的TOTAL_HEAP_SIZE中申请空间,而后者是从系统的堆(heap)中申请空间。
详细的分析看这篇博客:
https://www.cnblogs.com/LinTeX9527/p/8007541.html
数据发送任务的前几行代码有着落了:
void SendData_Task(void const * argument)
{
uint8_t *Data; //创建指针
uint16_t Data_Len = 0; //数据长度
Data_Len = ((uint16_t*)argument)[0];//获取数据长度
Data = pvPortMalloc(Data_Len-1); //申请内存,去掉校验和1字节
memcpy(Data,(uint8_t*)argument,sizeof(uint8_t)*(Data_Len-1)); //复制数组,去掉校验和
for(;;)
{
//待添加
}
}
互斥量的使用
当然,如果这里严谨一点的话,你会发现,即便这里进行了数据拷贝,但拷贝也不是一瞬间完成的,所以拷贝的时候,这段数据仍然不是安全的,仍可能被更改,下面就用到FreeRTOS的另一个功能了: 互斥量
正如其名,一个资源在被一个任务访问时,不能再被另一个任务访问,就叫互斥。
通过下面两个函数实现互斥:
osMutexWait(mutex_CopyData_h, osWaitForever); //等待互斥量被释放
osMutexRelease(mutex_CopyData_h); //释放互斥量
这其中mutex_CopyData_h是互斥量的句柄(可以看作是名称),osWaitForever表示一直阻塞等待,直到互斥量被释放。
如何使用呢?
按照上述情形举例,我们要在拷贝数据时用互斥量进行保护,数据发送任务就改进为下面这种形式:
/**
* @brief 数据发送任务
* @note 需要向服务器发送一条指令时,就创建一个发送任务,特点是等待回复和重发时不会阻塞其他任务进行
* @param argument:要发送的数据
* @retval None
*/
void SendData_Task(void const * argument)
{
uint8_t *Data; //申请内存指针
uint16_t Data_Len = 0; //数据长度
Data_Len = ((uint16_t*)argument)[0];//获取数据长度
Data = pvPortMalloc(Data_Len-1); //申请内存,去掉校验和1字节
osMutexWait(mutex_CopyData_h, osWaitForever); //等待互斥量被释放
/*被互斥量保护的区域*/
memcpy(Data,(uint8_t*)argument,sizeof(uint8_t)*(Data_Len-1));
/*被互斥量保护的区域*/
osMutexRelease(mutex_CopyData_h); //释放互斥量
for(;;)
{
//待添加发送函数
}
}
osMutexWait和osMutexRelease之间,就是我们希望保护的位置。
当然这只完成了一半,同样的,我们需要在存在数据覆盖风险的位置设置互斥量的保护区。
例如下面:传入数据发送任务的参数是名为Data_Buf的数组
osThreadDef(DATA_SEND_TASK_H,SendData_Task, osPriorityHigh,0, 128); //心跳帧重发任务的宏
osThreadCreate(osThread(DATA_SEND_TASK_H),Data_Buf)
那么我需要在修改Data_Buf的位置设置互斥量保护区:
osMutexWait(mutex_CopyData_h, osWaitForever); //等待互斥量被释放
Data_Buf[0] = 0;
osMutexRelease(mutex_CopyData_h); //释放互斥量
被互斥量保护的区域,同时只能被一个任务访问,直到这个任务释放互斥量,下一个任务才能访问。
这样,我们就可以保证拷贝数据的时候,数据不会被误修改。
消息队列的使用
我们继续完善数据发送任务,回到需求分析,数据发送任务除了需要完成数据发送,还需要监听是否收到与此帧数据匹配的应答帧。
如果同时有好几个数据发送任务在等待应答帧,这时候收到了一条应答帧,对于某一个数据发送任务来说,如何判断这条应答帧是发给自己的呢?
上翻查阅数据帧格式的表格,可以看到,每一帧数据有唯一的FrameId,回复帧也有FrameId,它的FrameId与它要回复的数据帧的FrameId相同。
对于某一个数据发送任务来说,它只需要与收到的回复帧的FrameId进行匹配,若与自己的Frame相同,则判断这个回复帧是回复给自己的,如果是回复给自己的,这个数据发送任务就完成了自己的使命,可以把自己删除了。
所以当有多帧数据同时等待回复帧时,需要开设一个缓存区,存放收到的回复帧的FrameId,供数据发送任务查询。
这个缓存区,就交给 消息队列来完成
FreeRTOS对消息队列的处理,我用到了下面几个API:
//查询队列中元素的个数
osMessageWaiting(MsgBox_Frame_Id_Handle);
//获取并删除队列中的一个元素
osMessageGet(MsgBox_Frame_Id_Handle,osWaitForever);
//向队列存放一个元素
osMessagePut(MsgBox_Frame_Id_Handle,evt.value.v,osWaitForever);
- MsgBox_Frame_Id_Handle是这个队列的句柄
- osWaitForever表示这个函数执行的超时时间,超过了这个值就会自动退出,这里是永久等待
- evt.value.v是要向队列里存入的元素
如何实现查询队列中是否有与自己匹配的FrameId呢?
我的思路是,先通过osMessageWaiting读出当前队列中元素的数量N
,进入循环,每个循环中,使用osMessageGet取出一个元素,由于队列是先进先出,所以这个元素是从队列头部取出的,判断是否匹配,如果匹配,皆大欢喜,这个数据发送任务就解脱了;如果不匹配,再将这个元素用osMessagePut重新加入到队列尾部,这样循环N次,就相当于把队列查询了一遍。
数据发送任务就基本完成了:
/**
* @brief 数据发送任务
* @note 需要向服务器发送一条指令时,就创建一个发送任务,特点是等待回复和重发时不会阻塞其他任务进行
* @param argument:要发送的数据
* @retval None
*/
void SendData_Task(void const * argument)
{
uint8_t *Data; //申请内存指针
uint16_t Data_Len = 0; //数据长度
Data_Len = ((uint16_t*)argument)[0];//获取数据长度
uint16_t FrameId = 0; //帧Id
uint32_t MsgBox_Data_Num = 0;//队列中有效数据的数量
osEvent evt; //存放osMessageGet的返回值
Data = pvPortMalloc(Data_Len-1); //申请内存,去掉校验和1字节
osMutexWait(mutex_CopyData_h, osWaitForever); //等待互斥量被释放
/*被互斥量保护的区域*/
memcpy(Data,(uint8_t*)argument,sizeof(uint8_t)*(Data_Len-1));
/*被互斥量保护的区域*/
osMutexRelease(mutex_CopyData_h); //释放互斥量
FrameId = (uint16_t)Data[Data_Len-2]<<8|(uint16_t)Data[Data_Len-3]; //装载这一帧数据的FrameId
for(;;)
{
osMutexWait(mutex_id_Resend, osWaitForever);//获取互斥量,防止其他的数据发送任务打断
MsgBox_Data_Num = osMessageWaiting(MsgBox_Frame_Id_Handle); //获取当前队列数量
if(MsgBox_Data_Num != 0) //如果队列非空
{
for(i=0;i<MsgBox_Data_Num;i++)
{
evt = osMessageGet(MsgBox_Frame_Id_Handle,100); //从队列中取出一个元素
if(evt.value.v == FrameId) //如果FrameId匹配
{
/****删除任务****/
osMutexRelease(mutex_id_Resend); //释放令牌
vPortFree(Data); //释放内存
osThreadTerminate (NULL); //删除本任务
}
else //如果不匹配
{
osMessagePut(MsgBox_Frame_Id_Handle,evt.value.v,500) //存回队列尾
}
}
}
User_SendData(Data,Data_Len); //发送数据
osMutexRelease(mutex_id_Resend);//释放互斥量
osDelay(5000); //每5s检测一次
}
}
除了上面的思路,我这里还使用了一个互斥量,用以保护整个发送过程,因为当有多个数据发送任务都再执行时,队列的取出和放回动作可能会被打断,出现某种极端情况。
例如任务A刚刚从队列中取出一个元素,发现跟自己的FrameId不匹配,但还没来得及放回去,CPU控制权就被任务B抢去了,任务B查询的时候,就少了这个任务A取走的元素,造成误判。
另外,发送数据是通过串口的,执行时间也比较长,如果发送时被打断,可能造成不可预估的后果,所以使用互斥量进行保护是十分有必要的。
在整个项目中,主要用到的就是上面几个API,数据发送任务,也是仅有的稍显复杂的任务,另外还有一些调试用的API,下一节更新。
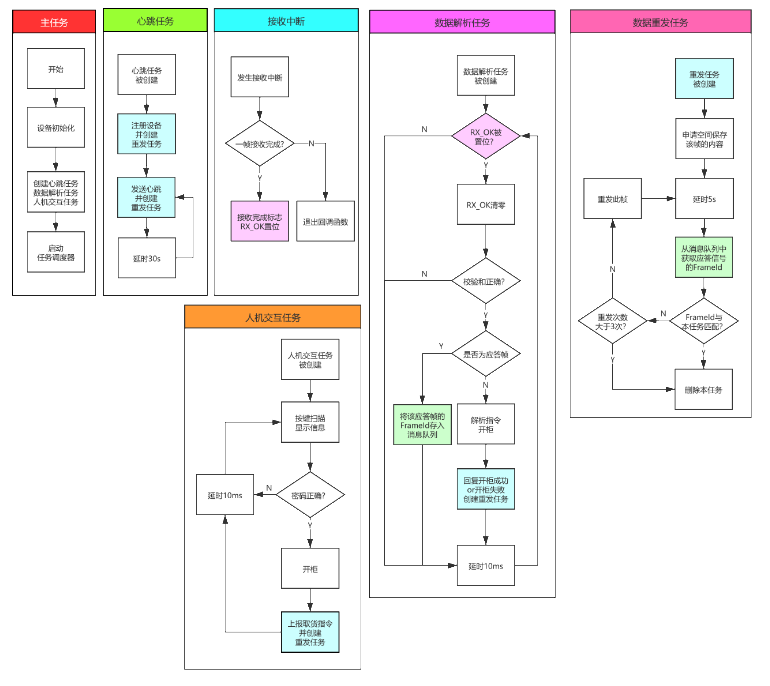
任务划分
根据功能划分了下面几个任务
- 人机交互任务:
包括按键扫描、LCD显示、蜂鸣器扫描,优先级较低 - 无线模块管理任务:
包括检测到服务器离线时,对WIFI模块/GPRS模块进行重新初始化,切换wifi网络或运营商网络模式等,优先级最高 - TCP透传发送任务
当要发送一帧数据时,该任务被创建,发送一帧数据,并对这帧数据进行监听,等待接收方回复,若未收到回复,则重新发送,通信完成则删除本任务。优先级较高 - TCP接收数据解析任务
由接收中断触发,解析数据,执行相应操作,优先级最高
这里简单列两个
人机交互任务:
/**
* @brief 人机交互任务
* @note 包括按键扫描、LCD显示、蜂鸣器鸣叫
* @param argument:任务参数(未用到)
* @retval None
*/
void Interactive_Task(void const * argument)
{
for(;;)
{
/**矩阵键盘扫描**/
/**键值处理**/
/**LCD显示**/
/**蜂鸣器扫描**/
osDelay(20);
}
}
无线模块管理任务:
/**
* @brief 无线模块管理任务
* @note 检测服务器是否离线,若离线则重新初始化无线模块
* @param argument:任务参数(未用到)
* @retval None
*/
void WirelessCTR_Task(void const * argument)
{
osDelay(1000); //等待ESP8266上电
for(;;)
{
if(server_sta == SERVER_OFF_LINE) //服务器离线
{
// osThreadSetPriority(NULL,osPriorityHigh); //调高优先级,防止打断
esp8266_init(); //初始化esp8266
// osThreadSetPriority(NULL,osPriorityNormal); //调低优先级
}
osDelay(20);
}
}
ESP8266 01S
配置TCP透传,用到的AT指令如下:
| AT指令 | 功能 |
|---|---|
| AT | 测试硬件是否正常 |
| ATE0 | 关闭回显 |
| AT+CWMODE=1 | 设置为客户端 |
| AT+CIPSTATUS | 判断状态:返回2表示已正常连接WIFI;返回3表示已正常连接服务器 |
| AT+CWJAP="MyWIFI","123456" | 连接WIFI |
| AT+CWAUTOCONN=1 | 设为自动连接WIFI模式 |
| AT+CIPSTART="TCP","192.111.1.1",8888 | 连接服务器 |
| AT+CIPMODE=1 | 设为透传模式 |
| AT+CIPSEND | 开始透传 |
| +++ | 关闭透传 |
初始化流程图:
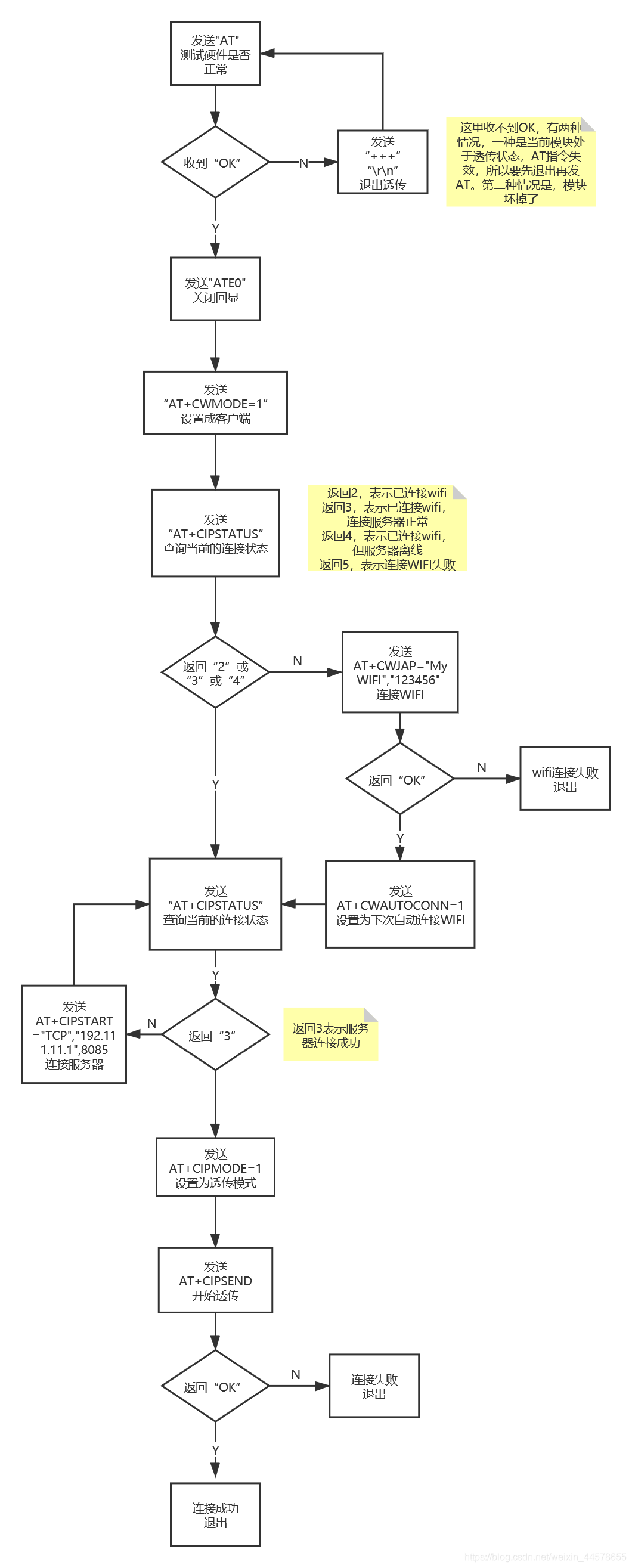
返回值的处理方法
基本思路是,开辟一个数组,收到的返回值存入数组,发送完指令后,等待一段时间,读取数组,利用**strstr()**这个函数,判断数组中是否有期望的返回值,查找完成后清空数组
以AT指令为例:
usart3_tx_dma_enable((uint8_t*)"AT",2); //发送AT指令
osDelay(50); //等待50ms
if(strstr(mes_buf,"OK")!=NULL) //找到对应字符串
res = 1; //返回1,否则返回0
else
res = 0;
clear_mes_buf(); //清空缓冲
return res;
退出透传出错解决办法
发送“+++”,不加\r\n,
但这会导致这之后的一个AT指令失效,所以,在发送完+++以后,还要再发送一个\r\n,后面的AT指令才能生效。
//关闭透传
void close_tran()
{
usart3_tx_dma_enable((uint8_t*)"+++",3); //发送+++
osDelay(500); //延时500ms
usart3_tx_dma_enable((uint8_t*)"\r\n",2); //实际测试时,发完+++以后,还需要一个指令(带\r\n)激活模块
osDelay(100); //延时100ms
}
如何判断服务器是否离线
一般情况下,在透传过程中服务器突然离线,会返回一个closed,但由于此前一直处于透传模式,单片机想要捕捉这个closed比较困难,所以需要用别的手段判断服务器是否异常离线。
这个项目的协议中,有心跳和回复帧的机制,可以根据发出的心跳是否得到回复来判断服务器是否在线。
如果检测到异常离线,再去重新初始化ESP8266,再进一步判断WIFI是否异常、服务器是否异常,定位问题。
原理图绘制
ESP8266和SIM800供电选择电路:

这里使用一个NMOS和一个PMOS实现模块切换,测试效果正常。
电磁锁驱动电路

我用的是NMOS,栅极电阻可以小一点,我实际用的是470R,这里甚至可以把栅极电阻短接。 R39是为了栅极下拉,防止IO口浮空时导致输出不稳定 D13是续流二极管,电磁锁是感性元件,防止关断瞬间击穿MOS
单片机最小系统部分

这里有一个防反接电路,主要是考虑到SWD接口容易插反,烧掉单片机,Q16是一个NMOS,用来防反接,插反以后MOS自动关断,R12是一个0欧电阻,不想用防反接功能,可以焊接R12进行短接。
USB转TTL部分

这个保险丝救了我好几次,一定不要省!!!用的是6V 700mA的自恢复保险丝。
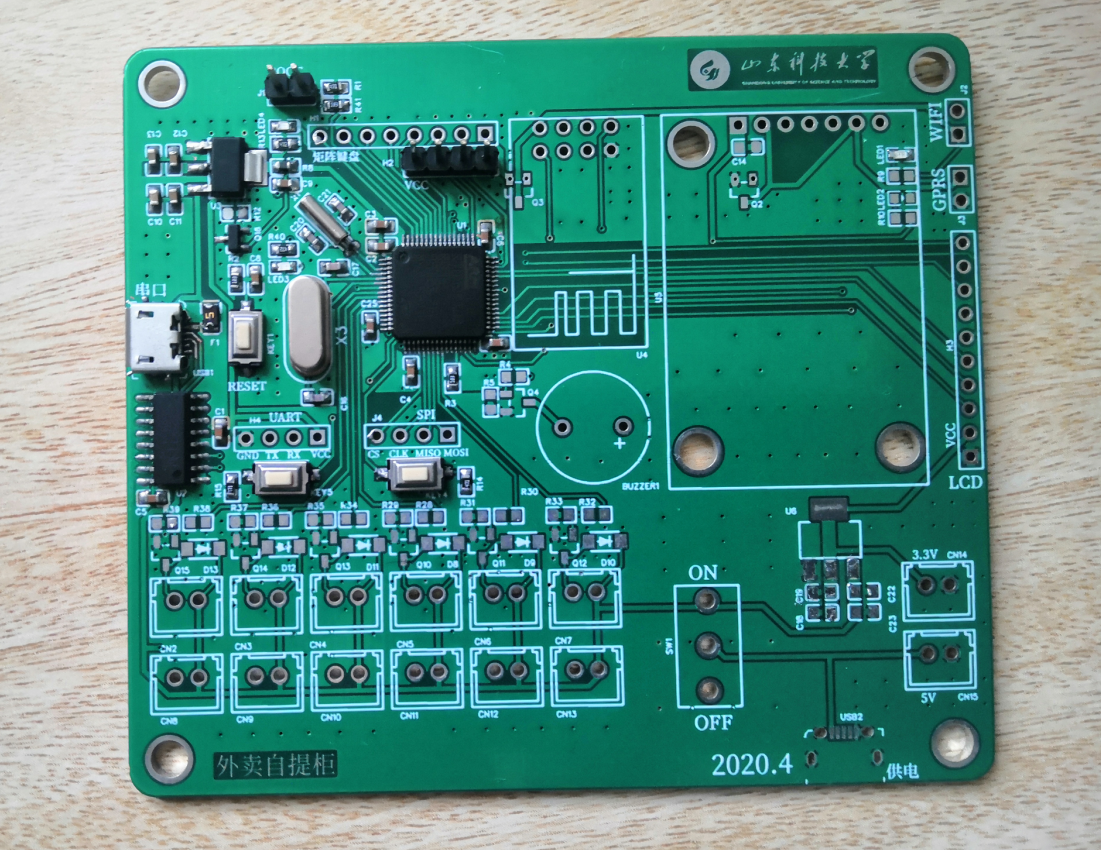
PCB绘制
PCB的一点点经验,大佬勿喷,
实话说,这种板子,随便画也能用...
芯片的电源引脚做好退耦,退耦电容要靠近引脚


**晶振走线尽量短,晶振周围不要走电源线** 
**USB信号线尽量不走过孔,平行走线** 
**天线下方不要铺铜:** 
**如果布局很紧凑,要针对性的多打一些过孔** 
**1.8寸TFT屏、SIM800L、ESP8266:** 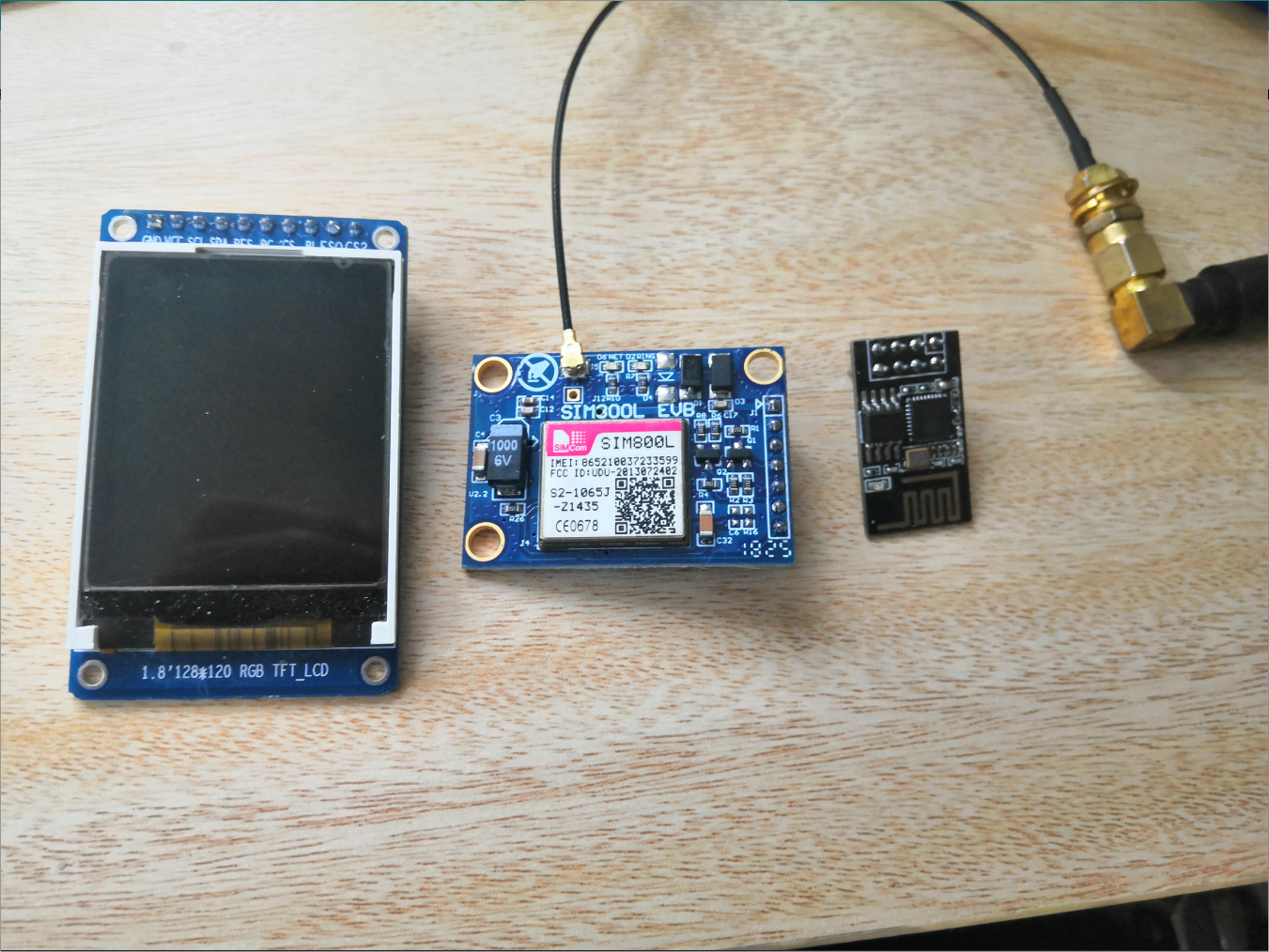
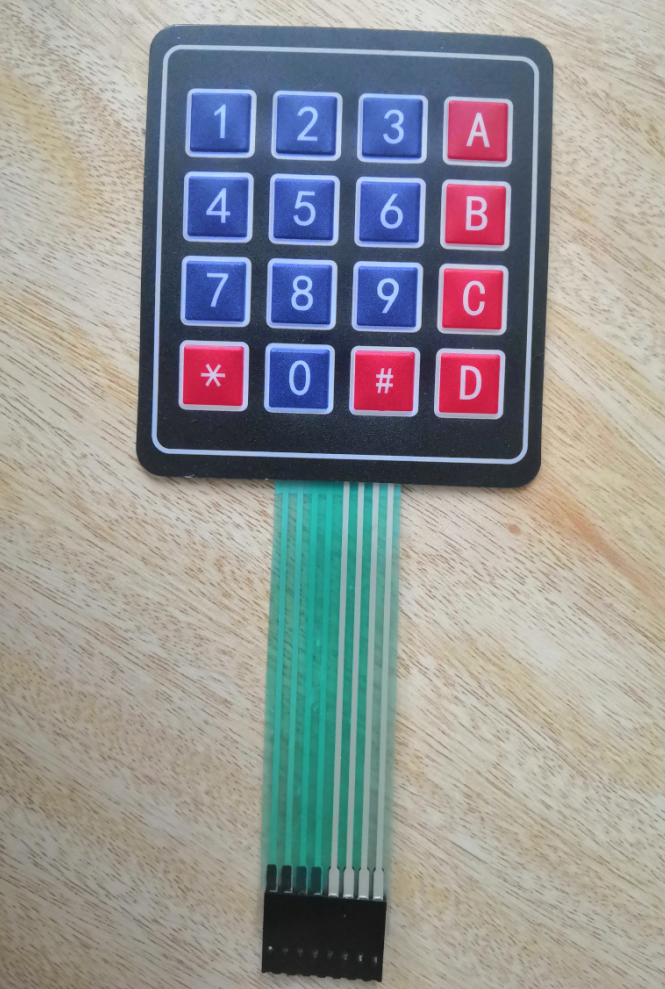
**4x4薄膜矩阵键盘:**
焊接:
没有风枪...千万别学我
洗版: 
接完如图: 
测试视频链接:
外卖自提柜测试视频
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









