



标准版
丐vata_ESP32体感手柄
1.3w
0
0
46
简介
丐vata体感手柄基于ESP32,目的在于通过体感控制航模的俯仰、横滚、偏航,支持CRSF信号输出、PPM信号输出
简介:丐vata体感手柄基于ESP32,目的在于通过体感控制航模的俯仰、横滚、偏航,支持CRSF信号输出、PPM信号输出开源协议
:GPL 3.0
创建时间:2022-10-11 11:01:34更新时间:2022-11-01 09:09:26
描述
板子一直在更新中,当前显示最新版可能还在修改中。请大家克隆后切换历史版本。
注意:此体感摇杆手柄还在开发阶段,稳定性、兼容性、安全性没有经过完整的测试,没有任何保证。对制作、使用该产品产生的问题本人概不负责。
QQ交流群474885499,入群答案:esp32
一、元件清单
1. ESP32 devkit1 开发板
2. 0.96寸4针OLED屏 *1
3. MPU6050陀螺仪 *1
4. 直插6*6按键 *1
5. 3脚2档单联钮子开关 *2
6. SS12D00G4 小拨动开关 *1
7. 12*9 有源蜂鸣器 *1(5V)
8. 旋转电位器 *1
9. 3.5mm音频插座 *1
10. S8050 三极管NPN(SOT23) *1
11. 贴片电阻(0603):150、 4.7k、 10k、 20k 各1
其他材料:
1. 排母、排针
2. 螺丝、螺柱
二、注意事项
1、MPU6050安装时与PCB垂直(如需与PCB贴合安装,需修改代码)
2、启动时需要保持稳定状态2秒,用于MPU6050校准。
3、按下复位按键时需要保持稳定,直至校准完成。
三、演示视频和图片
1、丐vata来啦,友好的体感航模遥控器?https://www.bilibili.com/video/BV1Ze4y1J7k8/
2、假组半成品的样子(缺高频头支架),边学边画的外壳,太丑太粗,希望有其他朋友画个好用的外壳,PCB的CAD图纸在附件。
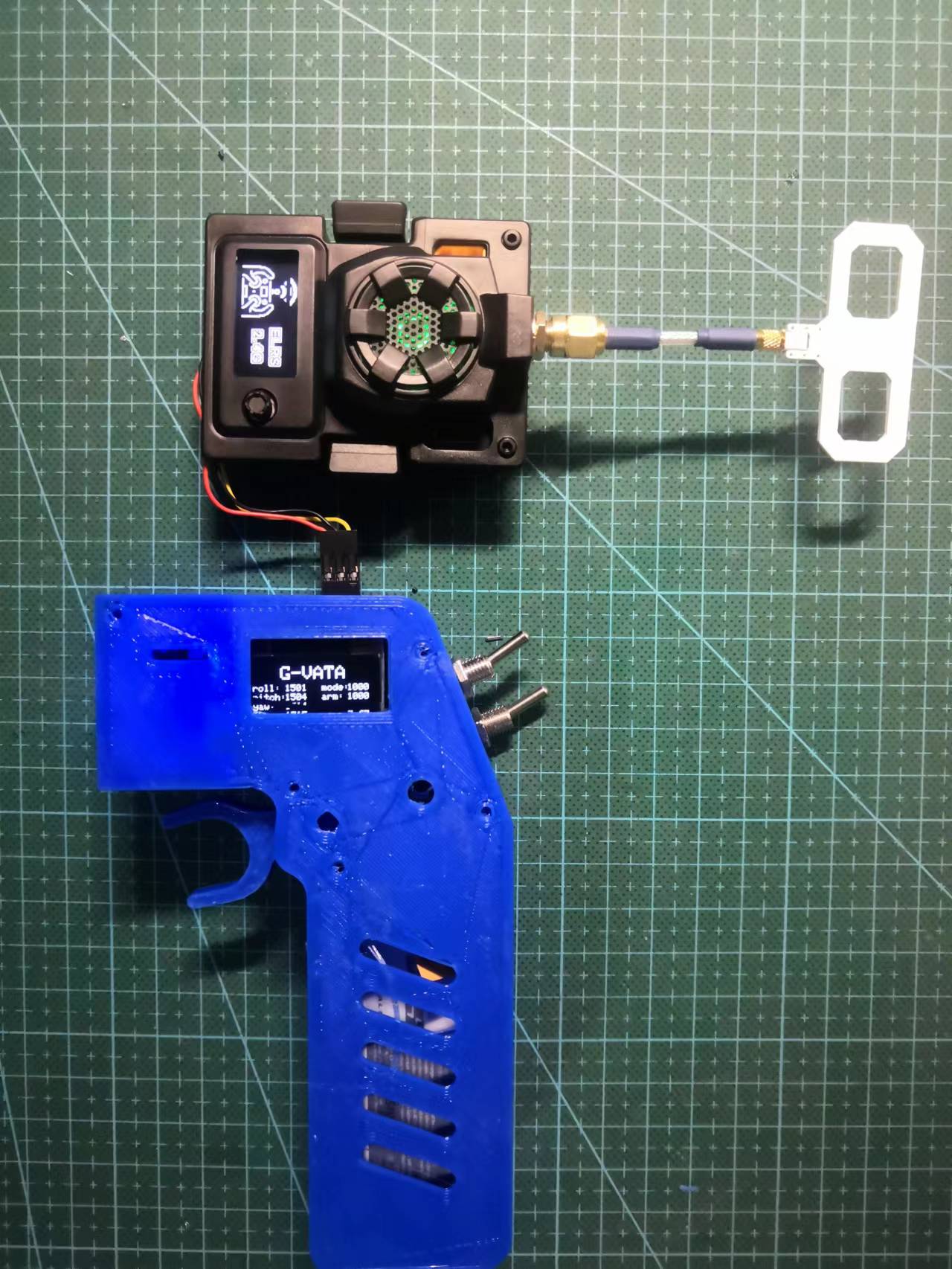
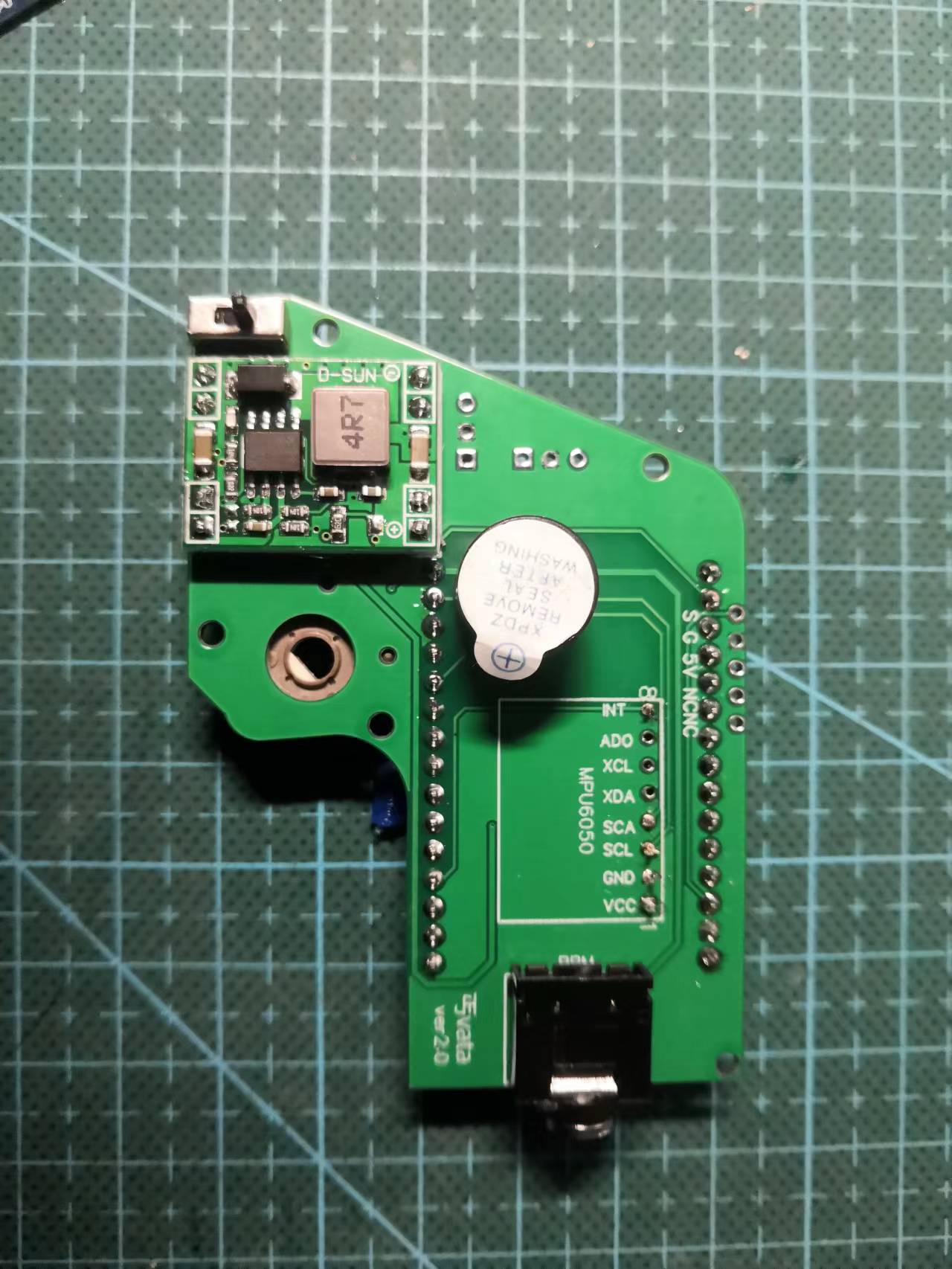
3、焊好的板子

四、致谢
此遥控器手柄的灵感来自于虾老板的“虾vata”,向虾老板致敬。
五、修改记录
2022-10-22:发布v3版PCB。修复BUG:插上模拟器音频线后,音频插座5pin与GND短路的问题。将音频座5Pin断开接线。
2022-10-31:发布V4版PCB。更改:MPU6050的AD0接地;板子改矩形,开关、插座、BB响、电位器都改接线方式,不再板载,最小化体积,便于塞进车控外壳。
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论