

简易机器狗
简介
一、硬件部分” 1、在立创机器狗基础上改用贴片电阻; 2、将两串电池改为两并,加强续航; 3、增加充放电管理电路,带充电状态红绿指示灯,可使用5V1A C口充电器进行充电
简介:一、硬件部分” 1、在立创机器狗基础上改用贴片电阻; 2、将两串电池改为两并,加强续航; 3、增加充放电管理电路,带充电状态红绿指示灯,可使用5V1A C口充电器进行充电开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
项目简介
嘉立创EDA开源机器狗
本项目是基于ESP8266进行WIFI通讯,可通过API 进行网络对时,网络天气查询
项目功能
本设计是基于ESP8266WIFI模块设计的机器小狗,由四个舵机作为动力,以8266WIFI模块作为核心,监测电池电量,控制机器狗的运动,表情,以及联网信息查询。
项目参数
1、采用14500电池并联方式进行供电;
2、ESP8266模块、屏幕供电3.3V由LDO提供;
3、舵机供电使用TP5400充放电管理IC,集成充电指示灯,放电升压一体;
4、采用C口充电
原理解析(硬件说明)
此处可填写项目的设计原理,将设计的原理拆分解析,示例:
本项目由以下部分组成,
电源部分:
采用锂电池供电,供电电压:3.7-4.2V
锂电池供电到电源管理电路,进行升压至5V,对舵机进行供电;
同时再使用LDO对5V进行降压,为主控模块以及屏幕供电;
注意事项
1、采用固件烧录,未对原代码进行调整,电压显示不准确,但有通过硬件更改ADC采样电阻,电量百分比参数是正确的;
2、持续升压,L1电感温度会比较高,建议与电源之间采用导热垫进行隔挡;
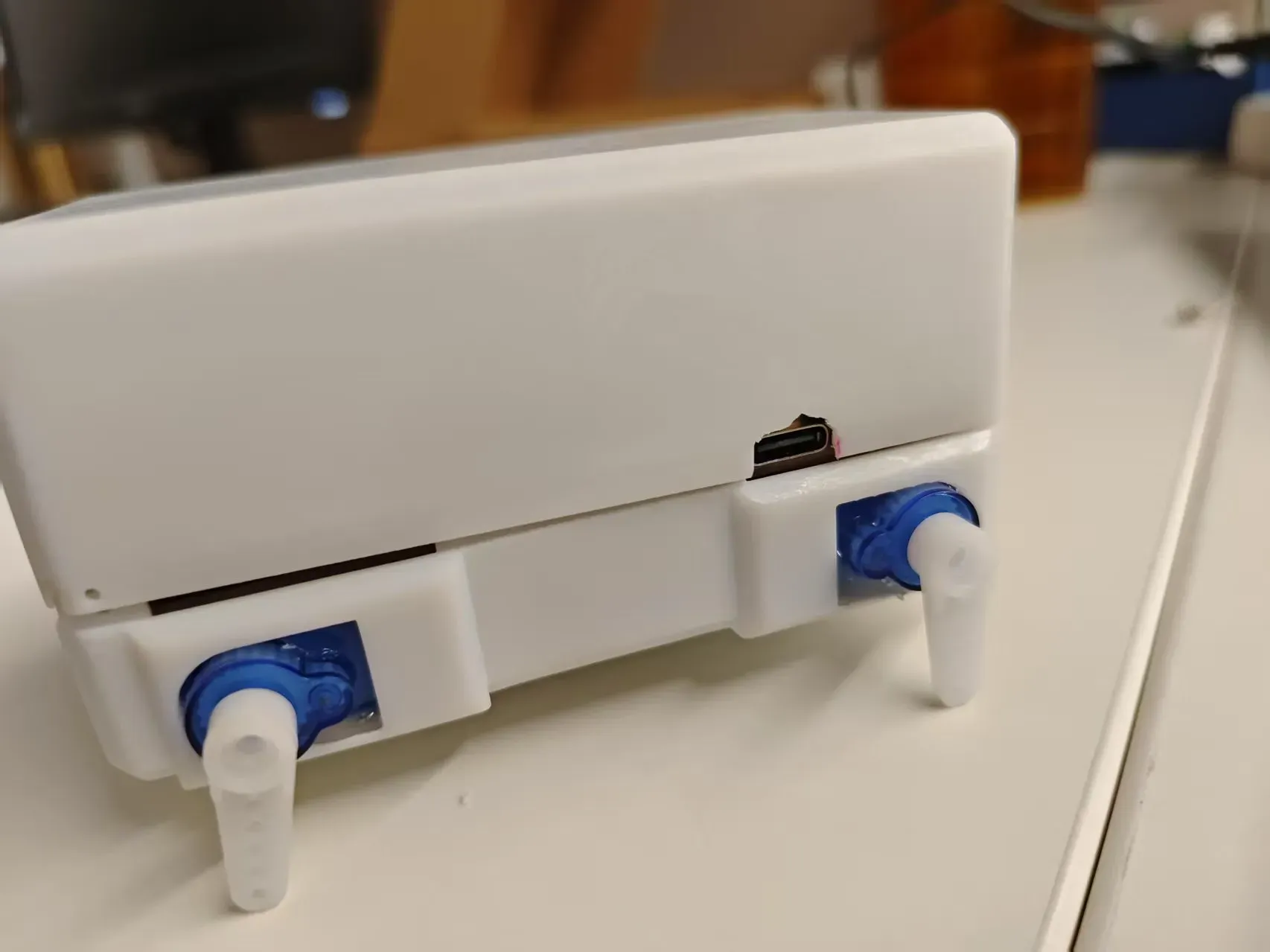
3、3D打印外壳文件未进行充电口开孔,需要重新增加开孔,或者打印回来今后手动开孔;
此处可填写在设计制作时需重点关注的点或是易错的地方,示例:
组装流程
1、底部为舵机*4
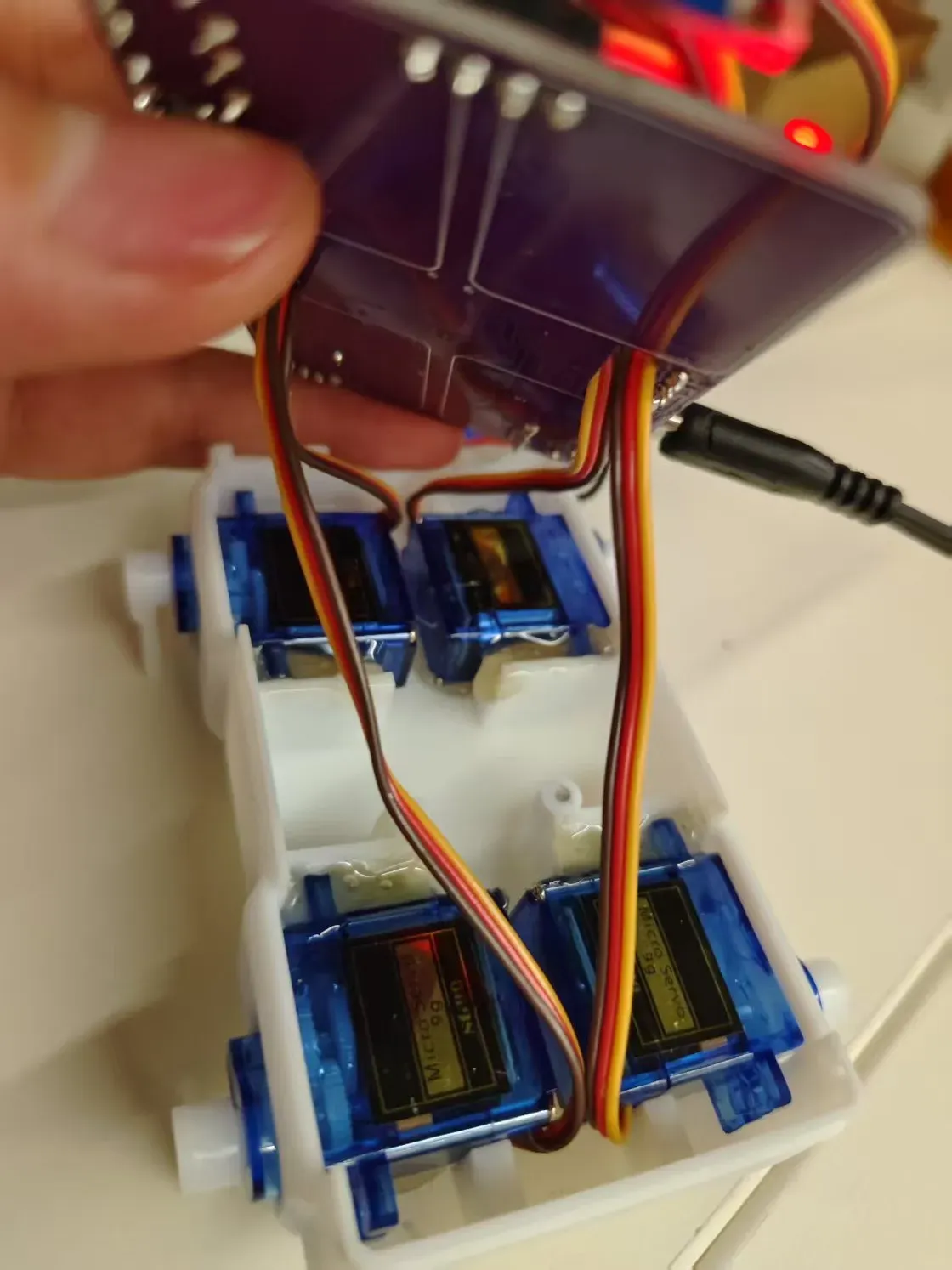
2、主控板在中间
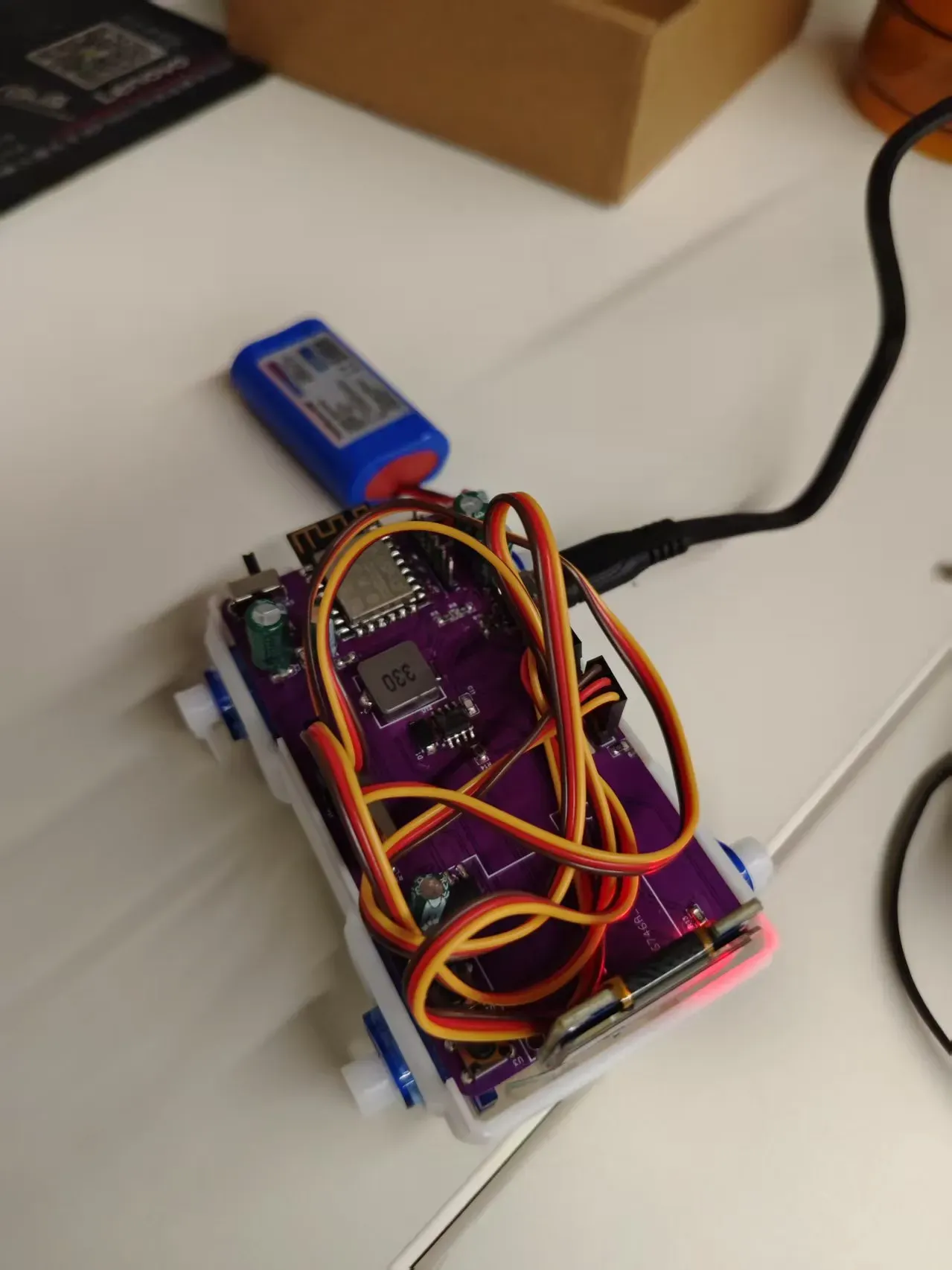
3、电池不固定,可通过散热垫或者热熔胶固定

4、C口充电口手动开孔(比较丑,请忽略)
实物图

设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论