

专业版
全能智能平衡小车:蓝牙遥控+自动跟随+自我保护!
1.5k
0
0
5
简介
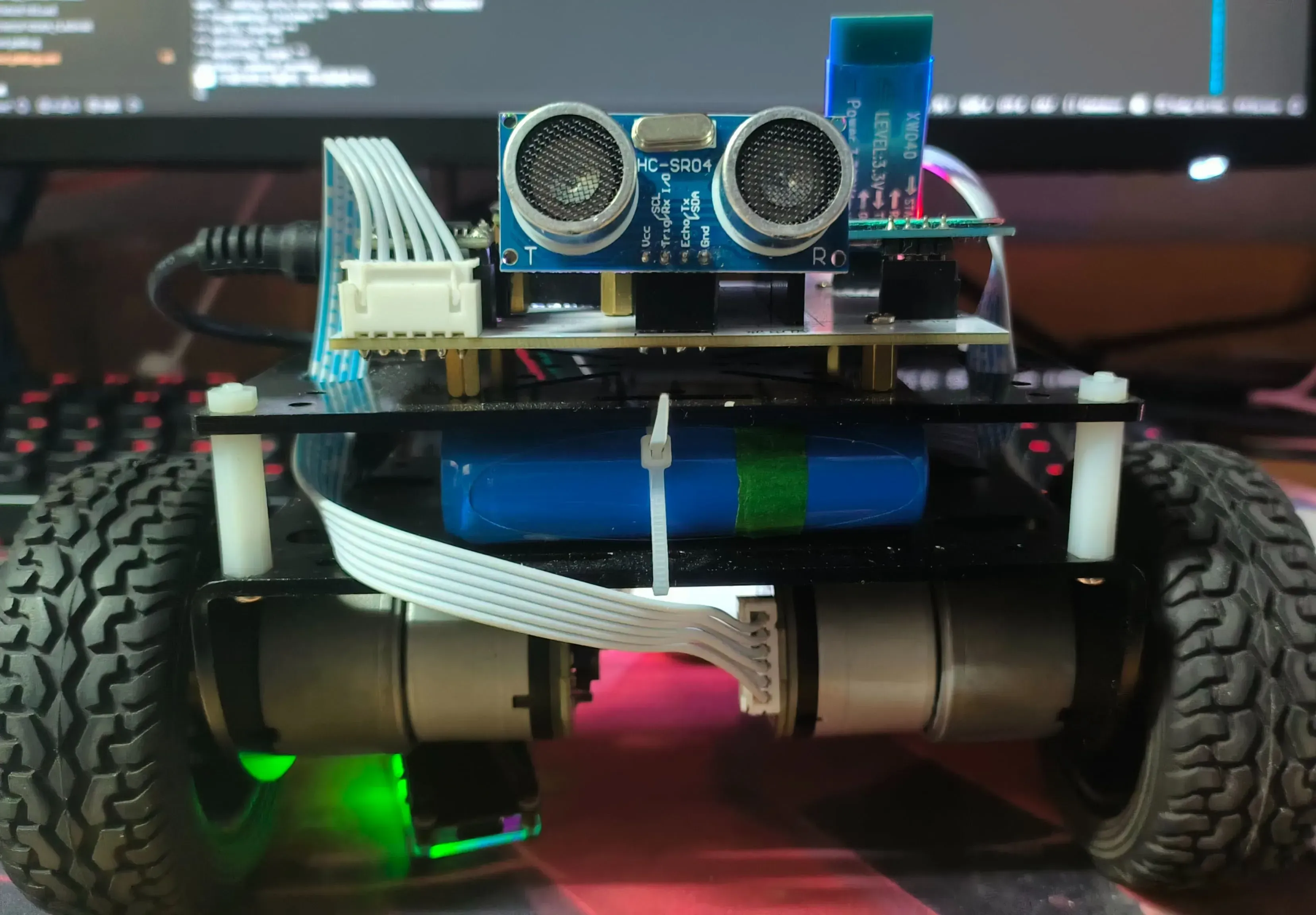
全能智能平衡小车:蓝牙遥控+自动跟随+自我保护!集平衡,遥控,跟随以及倒地、着陆、提起检测于一体的安全保护功能,具备出色的抗干扰与自适应能力,趣味性与实用性兼备!
简介:全能智能平衡小车:蓝牙遥控+自动跟随+自我保护!集平衡,遥控,跟随以及倒地、着陆、提起检测于一体的安全保护功能,具备出色的抗干扰与自适应能力,趣味性与实用性兼备!复刻成本:¥200
开源协议
:GPL 3.0
创建时间:2025-04-27 14:46:13更新时间:2026-01-26 11:18:00
描述
github:https://github.com/abcuer/STM32_Balance_Car.git
github:https://github.com/abcuer/HAL_Balance_Car.git
gitee:https://gitee.com/FASCINATING_SEA/STM32_Balance_Car.git
功能
- 平衡模式:白灯表示平衡模式,具备较强的稳定平衡能力。
- 蓝牙避障模式:蓝灯表示蓝牙模式。可通过手机控制小车运动;当小车距离物体小于设定距离时,小车触发声光警报;当小车处于安全距离,恢复正常。
- 超声波跟随模式:红灯进入跟随模式。小车会跟随设定距离内的物体;若物体距离小于设定距离,小车将自动后退,与物体保持安全距离。
- 提起检测:当小车被拿起并持续一段时间后,小车将停止运行。
- 着陆检测:当小车处于直立状态,放置地上一段时间后,小车将恢复运行。
- 倒地检测:当小车处于倒地状态,小车将停止运行。
元器件
- IN5824二极管*3(过压保护)、10uF贴片电容(滤波)
- STM32F103C8T6最小系统板
- MPU6050陀螺仪
- OLED显示屏
- HC-SR04测距模块
- MC520电机
- Tb6612FNG电机驱动
- 蜂鸣器、LED灯3、66*5mm按键
- DC-DC降压模块5V
- 12V锂电池
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论