

【涂鸦智能】智能窗帘机器人-涂鸦版-931640A
简介
智能窗帘机器人-涂鸦版
简介:智能窗帘机器人-涂鸦版开源协议
:GPL 3.0
描述
智能窗帘机器人-涂鸦版
功能:
1,红外遥控控制
2,手拉启动
3,遇阻停止
4,首次启动自动设置限位点
5,电量检测
6,涂鸦智能控制
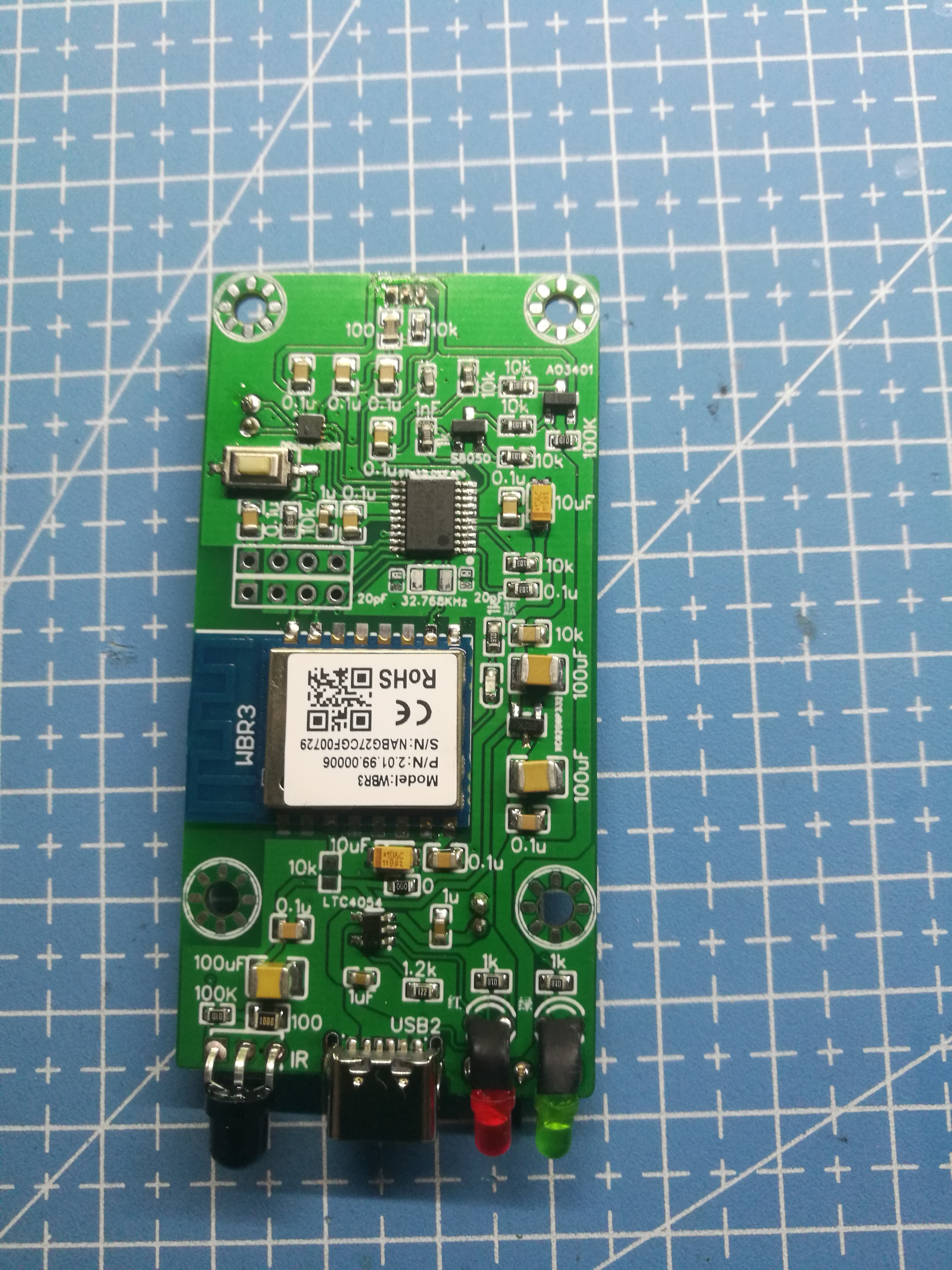
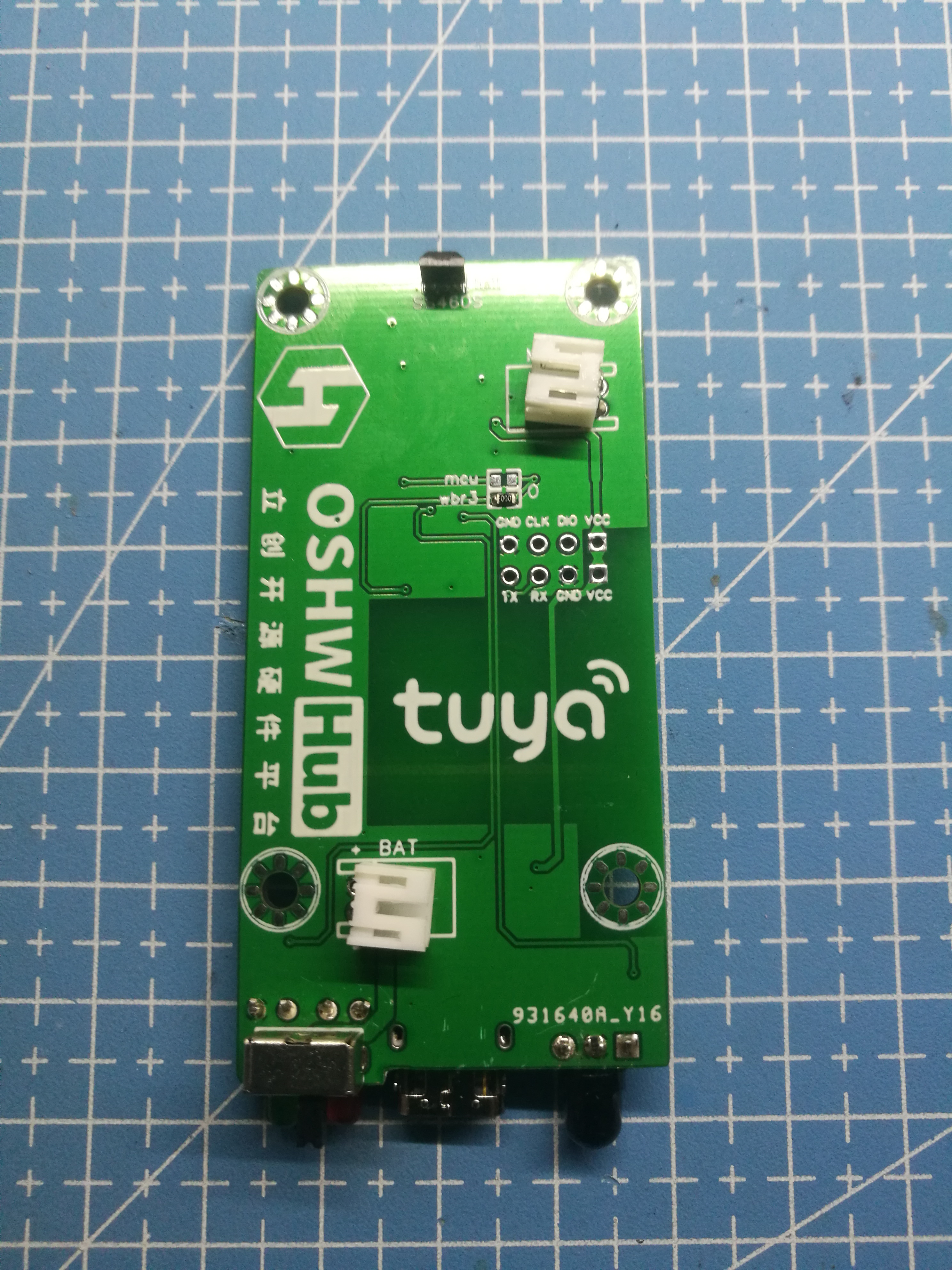
硬件配置
mcu stm32l010f4p6
wifi 涂鸦wbr3
红外接收 LF0038M
霍尔 ss460s 或 hs229 双极锁存低功耗霍尔传感器
电机驱动 DRV8837C
工作原理
涂鸦模组或红外接收 控制信号,mcu处理后控制电机转动。霍尔传感器检测位置及方向,实现行程限位,及手拉启动。mcu与涂鸦模块通过串口通讯,mcu使用低功耗模式,待机自动进入stop模式,可以由红外接收、涂鸦模块串口、霍尔模块等唤醒执行动作。配置adc检测电池电量。
安装使用:主机安装置于窗帘开启状态位置,开启电源,遥控或涂鸦app连接控制窗帘关闭,窗帘运行至关闭状态遇阻停止,程序自动设置关闭限位点,完成行程设置。后续就可以正常使用了。
红外遥控可实现,开启,关闭,停止 3种状态控制功能
涂鸦app实现:
开启,关闭,停止,继续 4种状态控制功能
开启关闭百分比显示及控制功能。
电量显示,手拉启动开关功能,定时功能,及与其他涂鸦设备联动。
问题 :1.垃圾轨道有些地方太窄,动力不足有些过不去,应该改7.4V供电。
2.原本设计是离线版,mcu待机模式休眠,配合活动加了涂鸦模块, 实时联网可能造成续航能力不足。
3.用的减速电机手动拉窗帘可能会有些难拉,
4.还有很多问题,仅供参考,不建议无基础照抄使用
https://github.com/freedom7890/cl_tuya

主板
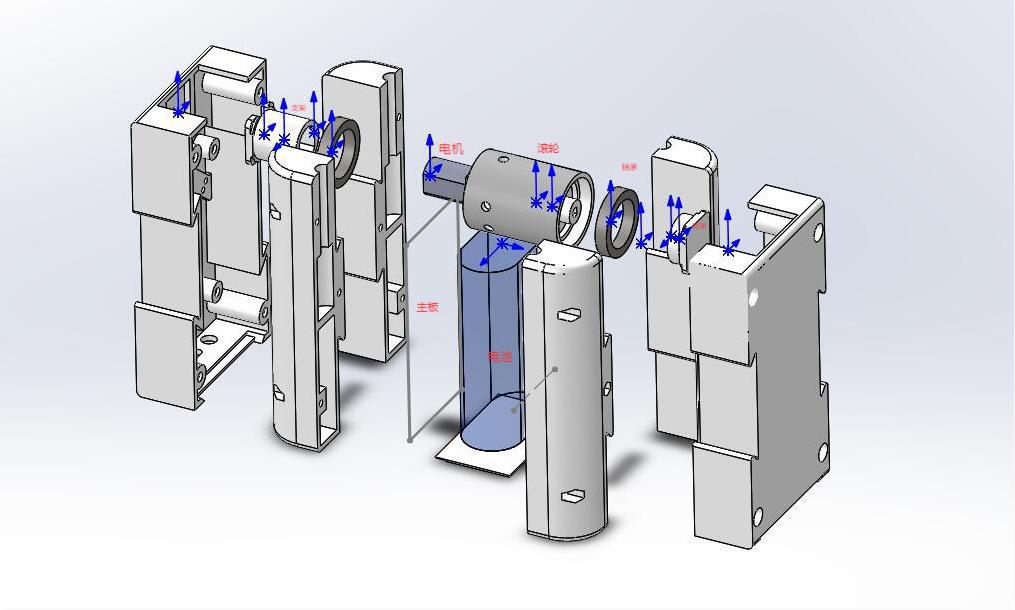
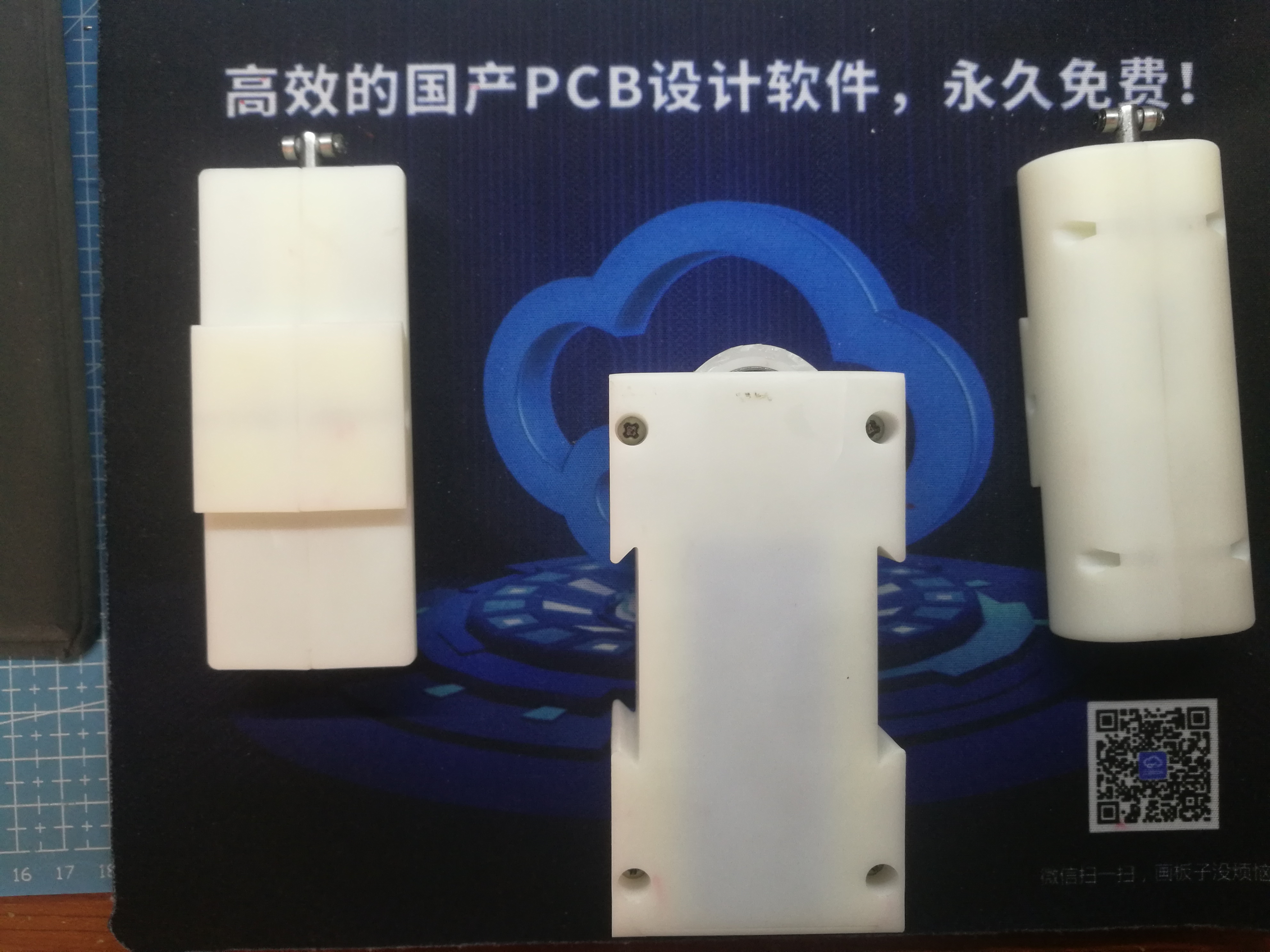
外壳设计
嘉立创3D打印
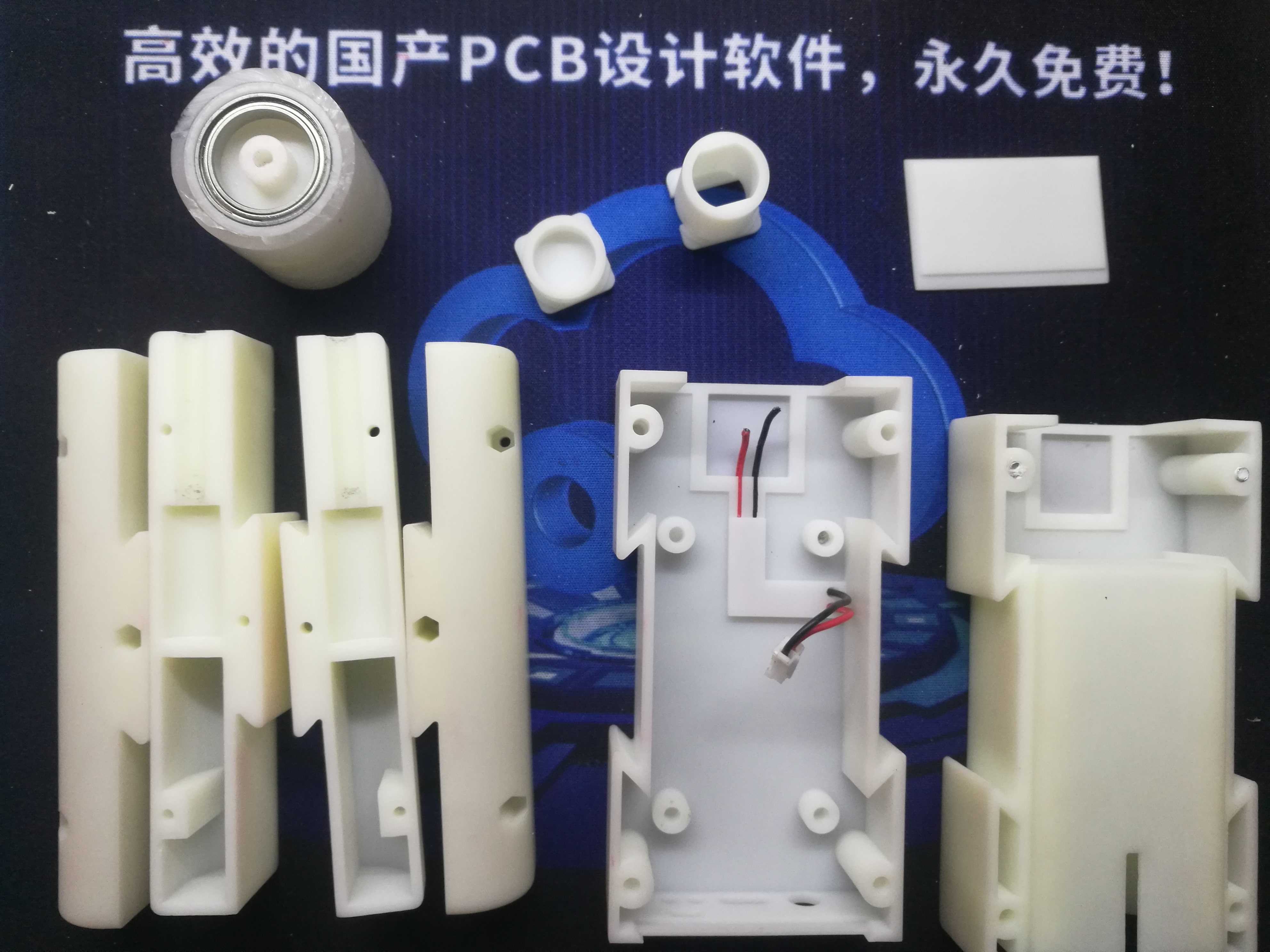
组装完成
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论