

专业版
一款舵机驱动的扑翼飞行器的运动控制器1.2.1Aoutput
1.6k
0
0
9
简介
一款舵机驱动的扑翼飞行器的运动控制器1.2.1Aoutput
简介:一款舵机驱动的扑翼飞行器的运动控制器1.2.1Aoutput复刻成本:¥60
开源协议
:MIT License
创建时间:2024-12-26 19:01:37更新时间:2025-08-08 17:16:23
描述
代码见附件,为板子烧写bootloader的教程可参考arduino 官方文档:docs.arduino.cc/built-in-examples/arduino-isp/ArduinoISP/
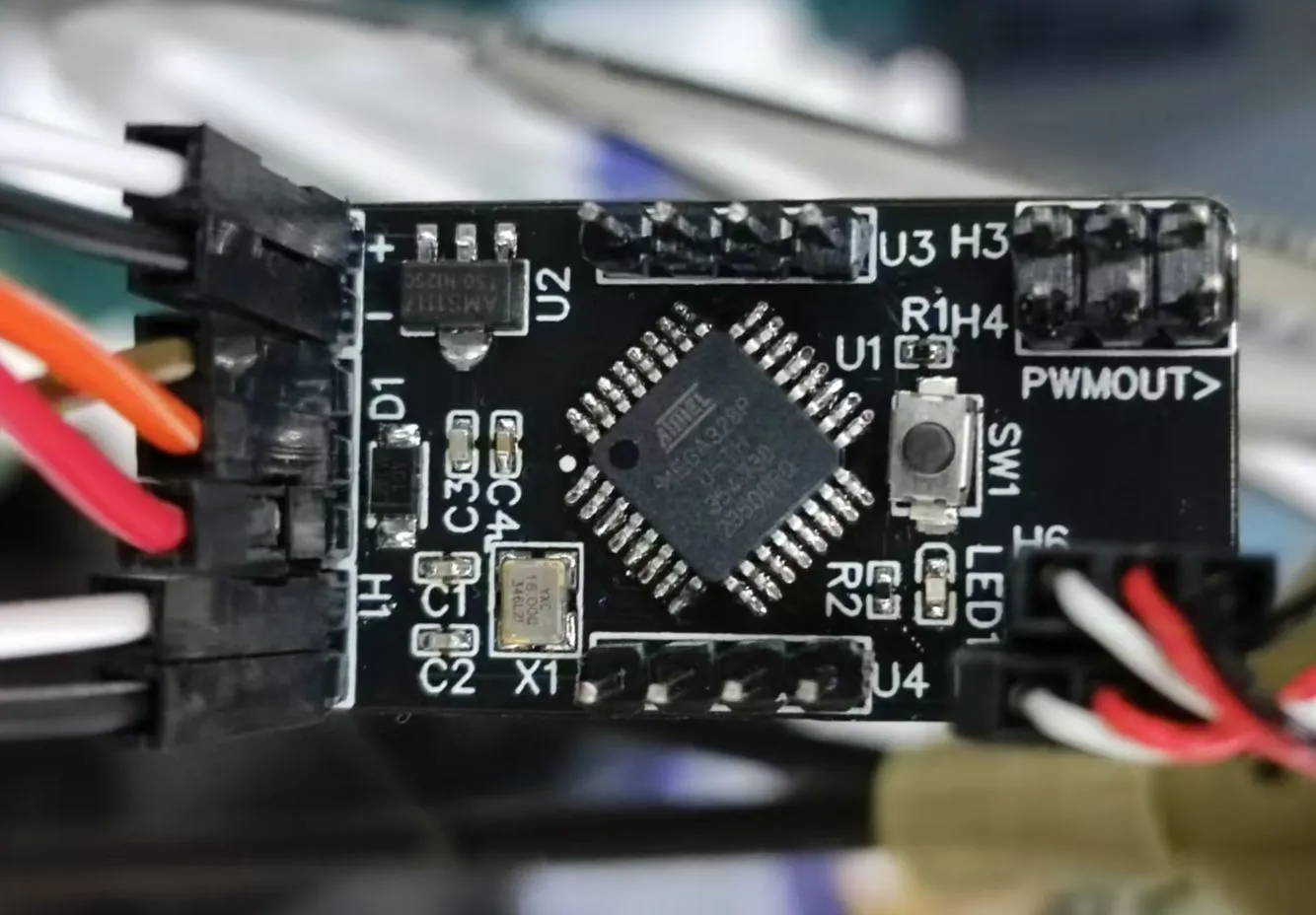
对于仿生扑翼蝴蝶飞行器或其它微小型飞行器而言,整体重量是不得不考虑的因素,此外,也应尽量减少系统所需的线缆数量和长度。
这样,既可以实现降低部分非控制部分的重量,也可以降低组装和布线的复杂程度。基于此原则,考虑到拟采用使用遥控设备的五个信号通道,在使用PWM信号格式下需要五组线缆来传递飞行指令的全部信息,相对而言是比较多和繁杂的。
所以,在本设计中,采用PPM信号模式来实现和完成遥控设备的无线接收器和运动控制器之间通信。通过PPM模式,可以将所需的五个信号通道整合进一组线缆中,这将很大程度上降低线缆数量。此外,考虑到需要对伺服电机进行独立控制,固保留伺服电机的PWM模式不变,这样,也不需要对伺服电机进行额外改造,可以降低一部分成本和系统复杂度。
系统基于Arduino框架下的avr单片机进行搭建,并留出了额外的两个PWM端口可供使用
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论