
PID入门套件PCB板复刻(江协科技)
简介
适用于B站UP主 江协科技 的《PID入门教程》,附件中有江协科技开源的原理图(PID电机驱动及控制板-V1.0) 附件中的文件均来自B站UP主 江协科技 ———更新了电源模块DC--DC,LDO
简介:适用于B站UP主 江协科技 的《PID入门教程》,附件中有江协科技开源的原理图(PID电机驱动及控制板-V1.0) 附件中的文件均来自B站UP主 江协科技 ———更新了电源模块DC--DC,LDO开源协议
:GPL 3.0
描述
项目简介
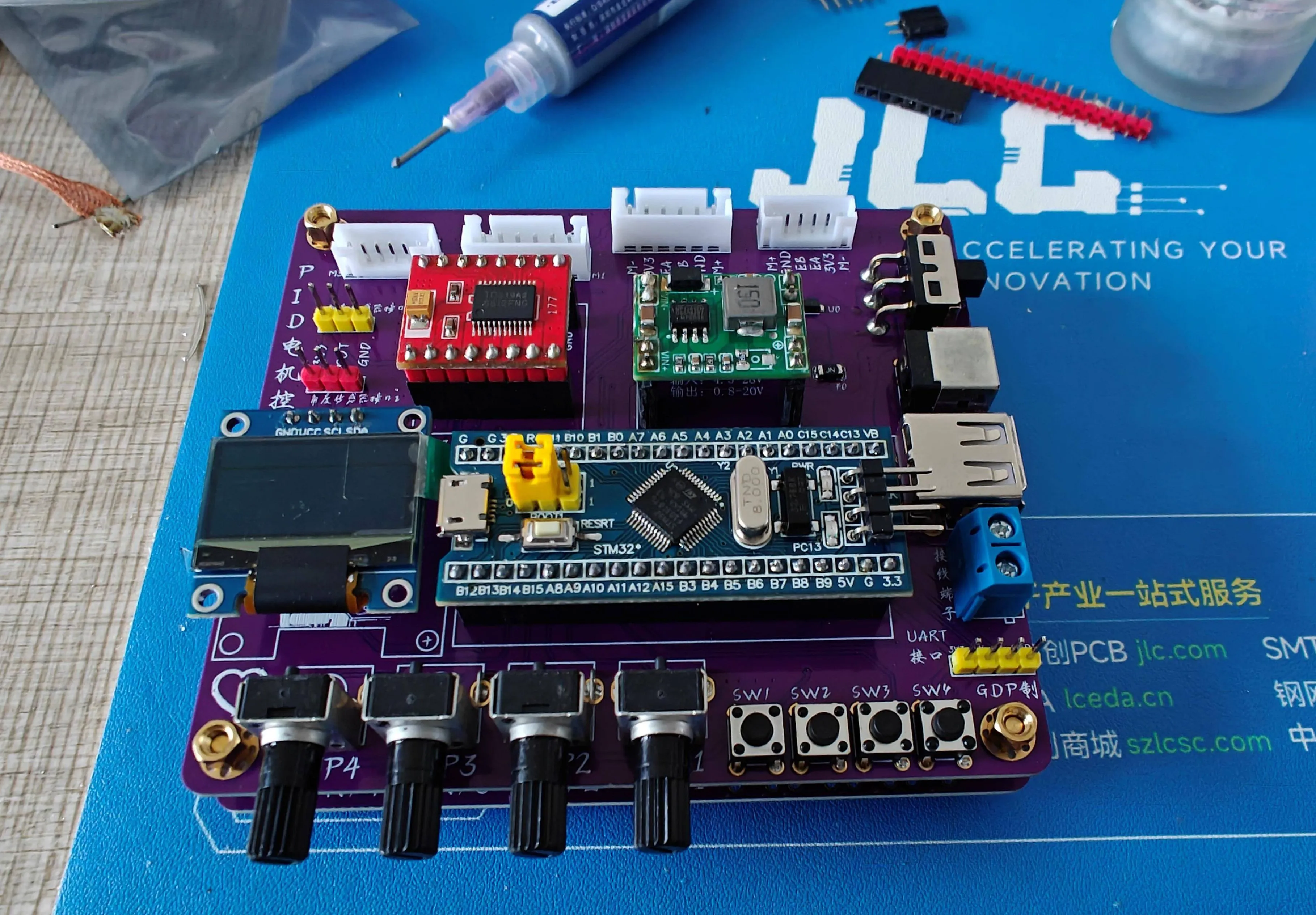
该PCB适用于B站UP主 江协科技 的《PID入门教程》,附件中有江协科技开源的原理图(PID电机驱动及控制板-V1.0)
本项目是基于STM32单片机的 PID 控制的入门教程,主要围绕 PID 原理、算法改进、双环 PID 及相关实验展开
项目功能
主要内容:涵盖 PID 基本原理、算法改进、双环 PID 基本原理,以及编码电机闭环控制实验和倒立摆实验
资料获取:可在 https://jiangxiekeji.com/download.html 下载资料,在淘宝 https://jiangxiekeji.taobao.com (店铺名:江协科技)购买硬件设备
项目参数
硬件平台包括STM32F103C8T6、稳压模块、电机控制模块、编码电机接口及传感器模块
软件平台介绍了 Keil uVision5 - MDK 和 SerialPlot 软件(附件),SerialPlot 可用于数据可视化,具备设置端口、数据格式、绘图范围等功能
PID 控制基础
定义与作用: PID 是比例(Proportional)、积分(Integral)、微分(Differential)的缩写,是一种闭环控制算法,基于误差(误差 = 目标值 - 实际值)调控,使被控对象物理量实际值跟踪目标值,对被控对象模型要求低。
开环与闭环控制: 开环控制单向输出,不获取反馈;闭环控制输出同时获取反馈,可优化控制 。
PID 公式与系统组成: PID 控制器根据目标值与实际值的误差计算输出值,作用于被控对象。主要包含比例项(P)、积分项(I)、微分项(D)。比例项依据误差大小成比例调节;积分项用于消除稳态误差;微分项根据误差变化率调节,抑制超调 。
PID 公式形式:连续形式 PID 用于理论分析,离散形式 PID 适用于数字控制系统。离散形式又分为位置式 PID 和增量式 PID,位置式 PID 计算全量输出,增量式 PID 计算输出增量,二者计算中间变量不同,可实现不同特性 。
PID 程序实现:
以 STM32F10x 为例,在中断函数中实现 PID 调控。位置式 PID 获取实际值、计算误差及积分,得出输出值并限幅后控制对象;增量式 PID(控制器内积分,输出全量)获取多次误差计算输出增量并累加,限幅后控制对象,用户可设定目标值 。
更新部分
使用 TPS62933DRLR DC-DC芯片(驱动电流可以达到3A),实现稳定的 5V 输出,适用于电机驱动。
使用 AMS1117-3.3 LDO芯片,可以稳定输出3.3V给MCU供电。
复刻成本
仅包括PCB板及直接焊接在PCB板上的元件
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论