


42步进电机FOC闭环恒流驱动v1.0
简介
42步进电机FOC闭环恒流驱动v1.0
简介:42步进电机FOC闭环恒流驱动v1.0开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
声明:参考B站UP銀河旅人。这是第一版软硬件,仅作学习交流,仅验证基本功能,程序尚不完善。软件为9月份编写,有些细节记忆不是很清晰,文档中描述可能会有错误。
效果见B站:https://www.bilibili.com/video/BV1Sr4y1Z7GV/?spm_id_from=333.999.0.0
https://www.bilibili.com/video/BV1pu411g7cc/?spm_id_from=333.999.0.0
銀河旅人: https://space.bilibili.com/279542681?spm_id_from=333.337.0.0
一、当前进度
1、实物


2、FOC速度位置闭环
3、上位机控制
4、OLED基本信息显示
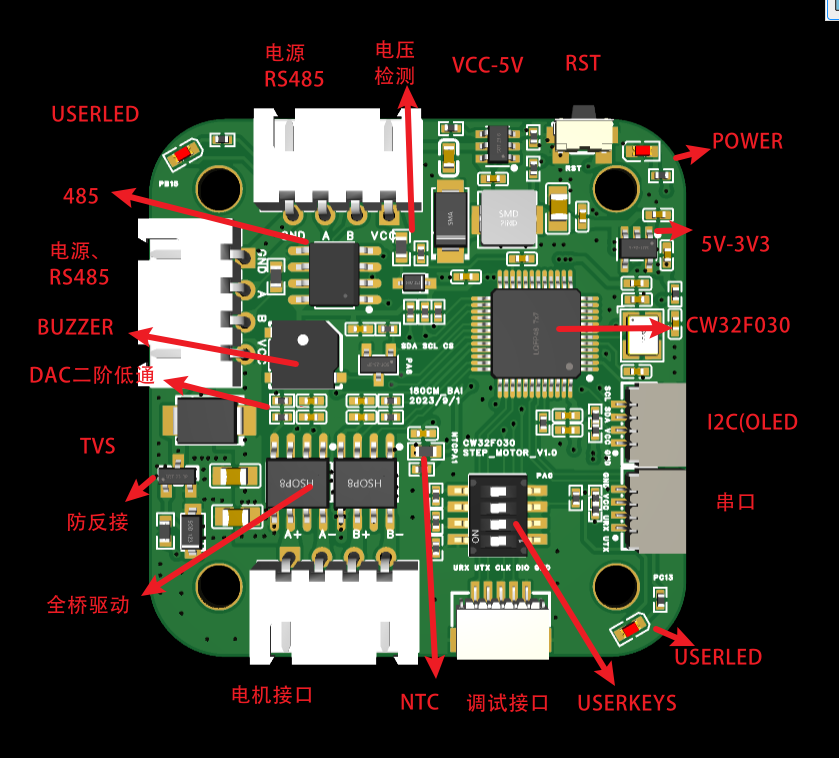
二、硬件介绍
使用CW32F030C8T6作为控制芯片
1、全桥驱动使用TB64H750,通过对PWM进行二阶RC低通滤波实现DAC恒流驱动
2、电源部分:12v->5v->3v3,输入部分接入TVS和防反接电路,注意选用的步进电机内阻,防止母线电流过大烧毁MOS。
3、设计步进电机可串接,通过RS485通讯,理论可行未实际验证
4、通过sh1.0接口引出UART,SWD,I2C接口,这里I2C接入了OLED显示基本信息,使用上位机控制OLED使用与否。注意OLED刷新会加长软件执行时间,影响FOC运行带宽,电机运转会有周期性卡顿。
5、板载NTC,电压检测、BUZZER、拨码开关、2xLED,实际作用根据大家需求设计。
6、磁编码器选择:程序中使用14BIT编码器,这里具体型号为MT6701。使用其他编码器,例如AS5600需要自行调整程序。这里FOC的实现方式为校准时旋转一圈,记录4X50步每一步的绝对角度范围。使用12BIT编码器会涉及到个问题:4096/200 =20.48 ;14BIT:16380/200=81.9;使用12BIT在实际旋转时有些小问题,具体看代码吧,记得不是很清楚了,在查找扇区那块。
三、软件介绍
详见源码,关键部分有注释解释,为个人理解,可能会有些错误。
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论