
创源启明仿生蝴蝶DRV8837四驱控制板开源2.0
简介
该项目致力于打造一款轻量化、高集成度、便于教学实验的仿生四翼飞行控制平台,帮助学生、创客、科研人员快速实现扑翼系统的独立驱动、姿态调节与参数控制。
简介:该项目致力于打造一款轻量化、高集成度、便于教学实验的仿生四翼飞行控制平台,帮助学生、创客、科研人员快速实现扑翼系统的独立驱动、姿态调节与参数控制。开源协议
:CC BY-NC-SA 4.0
描述
一、项目简介
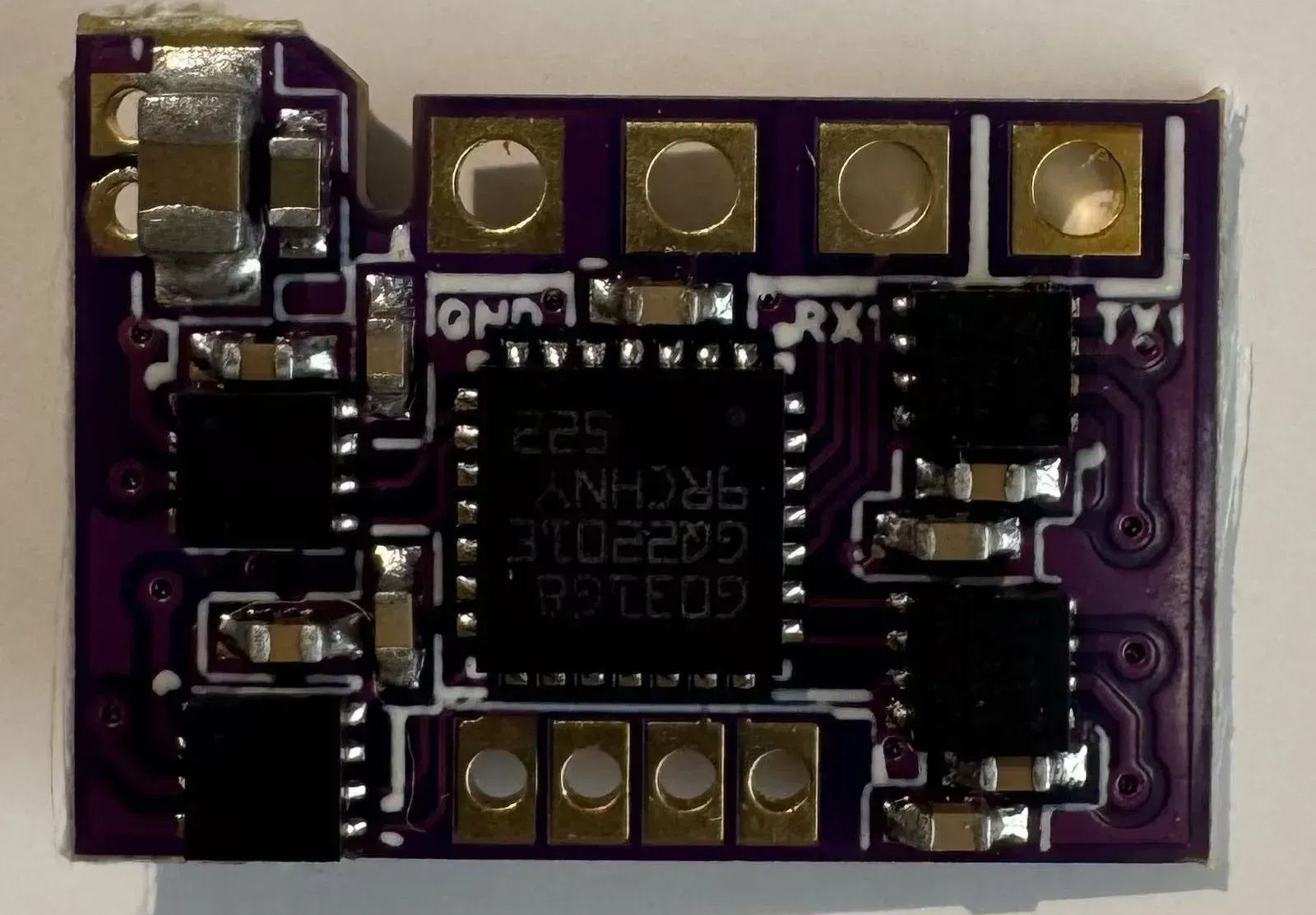
创源启明蝴蝶四翼主控 是一款面向仿生扑翼飞行研究与教学实验的轻量化飞行控制主控板,主要用于支持四翼独立扑翼机构的电机驱动与控制实验。
项目以“结构清晰、接口规范、便于学习与二次开发”为设计目标,适用于高校课程设计、工程实训、科研验证及开源社区技术交流等非商业应用场景。
本项目以硬件设计与配套文档开源的形式发布,旨在降低仿生扑翼飞行系统的入门门槛,推动相关技术在教学与研究领域的应用与交流。
二、V2.0 版本更新说明
在 V1.0 版本的基础上,V2.0 版本对电机驱动部分进行了结构性升级,核心变化如下:
-
电机驱动方案升级为 TI DRV8837 直流电机驱动芯片;
-
优化了电机驱动的功耗与发热表现;
-
提升了在连续运行与反复调试场景下的稳定性;
-
增强了对教学实验及初学者使用场景的适配性。
除电机驱动方案外,其余接口定义、整体结构与使用方式与前一版本保持兼容。
三、主要技术参数
| 项目 | 参数说明 |
|---|---|
| 硬件版本 | V2.0 |
| 电机驱动 | DRV8837 |
| 尺寸 | 14.8 mm × 11 mm |
| PCB 厚度 | 0.4 mm |
| 重量 | 约 0.39 g |
| 工作电压 | 5 V ~ 10 V(推荐 7.4 V) |
| 工作电流 | 待机约 40 mA,最大约 1 A |
| 单路电机功率 | ≤ 1.5 W |
| 工作温度 | -10 ℃ ~ +60 ℃ |
| PCB 工艺 | 沉金工艺 |
四、功能与接口概述
本主控板支持以下基础功能模块:
-
电源输入接口:2P 焊盘,支持 2S 锂电池供电;
-
电机驱动接口:支持双电机与四电机两种接线模式;
-
磁编码器接口:6P 接口,用于电机角度反馈实验;
-
接收机接口:支持外部接收机信号输入;
-
程序下载接口:MX1.25-4P 接口,支持探针或母座烧录;
-
状态指示 LED:用于显示供电与运行状态。
接口布局与功能定义详见项目配套使用手册。
五、开源内容
本项目当前已开源以下内容:
-
硬件原理图文件;
-
PCB 设计文件;
-
主要接口与连接说明文档;
-
使用与调试指导文档。
后续版本将根据社区反馈逐步补充示例程序与应用设计说明。
六、开源协议
本项目采用 CC BY-NC-SA 3.0(署名—非商业性使用—相同方式共享) 开源协议发布。
许可说明:
-
允许对本项目进行学习、研究、复制、分发与修改;
-
所有衍生作品需保留原作者署名,并继续以相同协议发布;
-
本项目及其衍生作品 不得用于任何商业用途。
如需商业使用或定制化授权,请联系项目维护方获取书面许可。
七、适用范围与说明
本项目主要面向以下使用场景:
-
仿生扑翼飞行原理研究;
-
高校课程设计与工程实训;
-
开源硬件学习与交流;
-
非商业性质的实验验证与展示。
本项目不构成商业级飞控解决方案,使用者需自行评估其在具体实验中的适用性。
八、项目维护与交流
-
项目维护单位: 创源启明实验室
-
项目开源地址:立创开源广场
-
技术交流方式:QQ交流群:1032378157
欢迎对项目提出改进建议或提交设计优化方案。
九、免责声明
本项目按“原样”提供,不附带任何明示或暗示的保证。
项目维护方不对因使用本项目而产生的任何直接或间接损失承担责任。
版权声明
© 2026 创源启明实验室
本项目遵循 CC BY-NC-SA 4.0 协议发布。
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论