

ESP32S3四足蜘蛛机器人
简介
偶然间发现嘉立创搞了个机械狗的训练营,做狗咱是专业的,太没意思了,这次我来带大家做个四足蜘蛛吧。
简介:偶然间发现嘉立创搞了个机械狗的训练营,做狗咱是专业的,太没意思了,这次我来带大家做个四足蜘蛛吧。开源协议
:MIT License
描述
B站演示视频地址:https://www.bilibili.com/video/BV13G5NzDESk/
安装说明
在开始安装之前,需要先用代码将所有舵机转动到90度。在没有安装好舵盘之前,切记不要手欠去转动舵机转轴
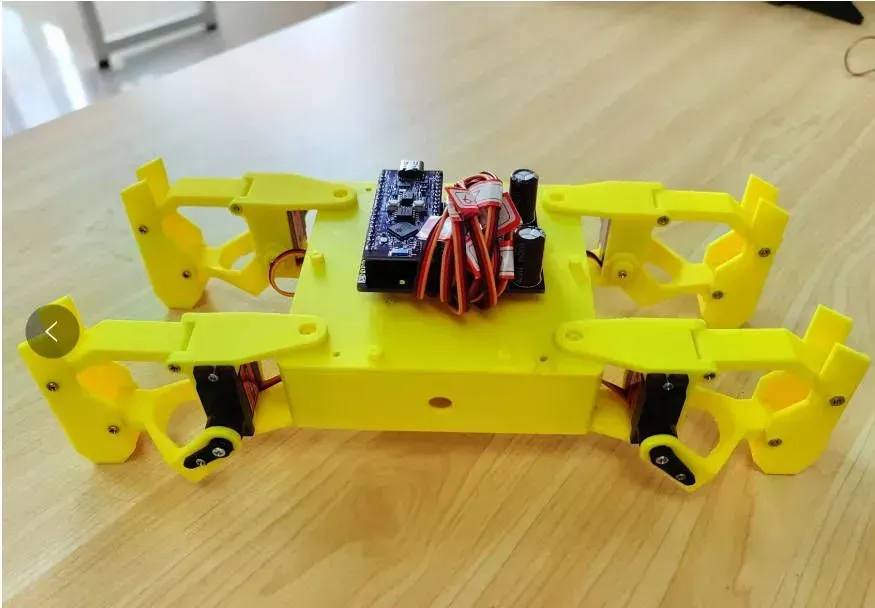
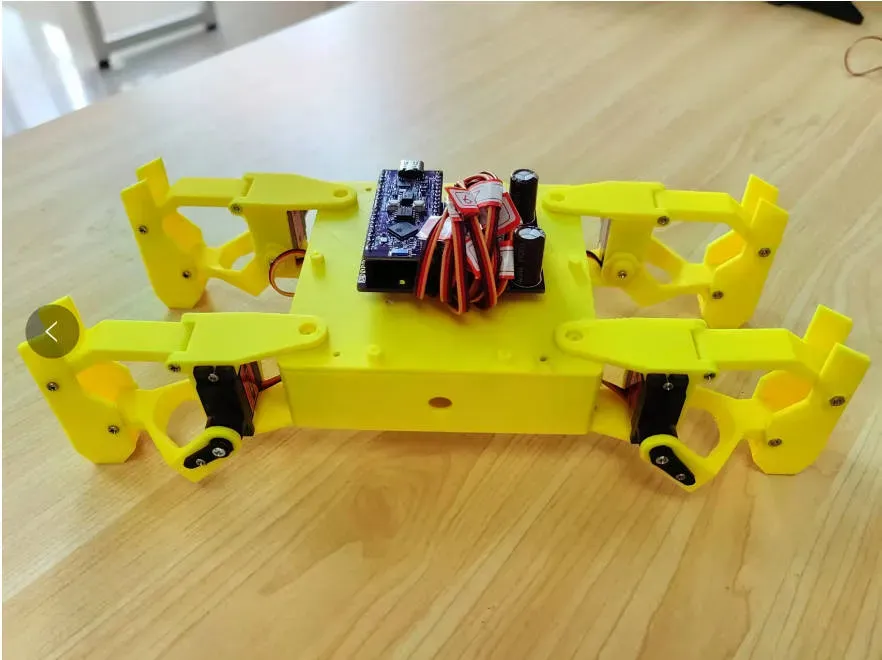
俯视图
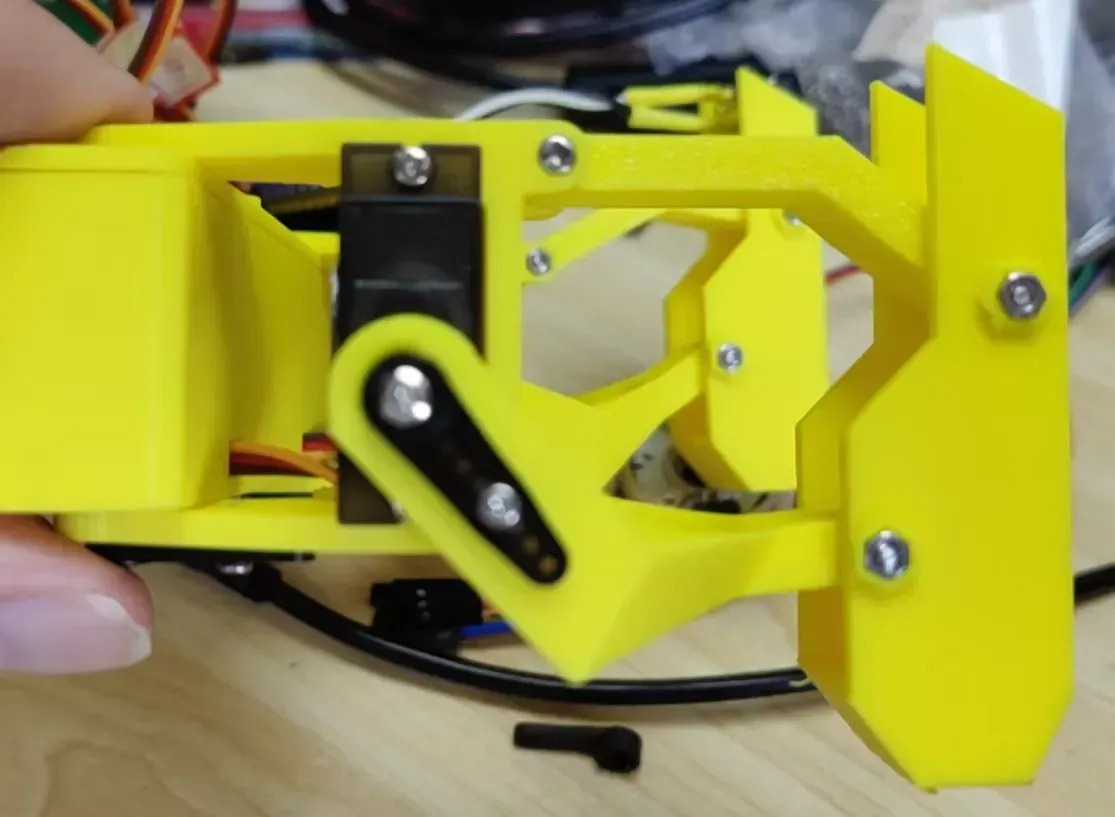
侧视图
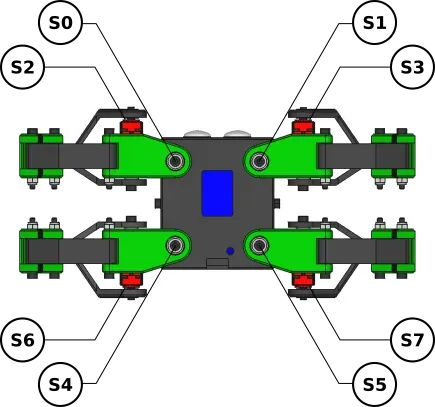
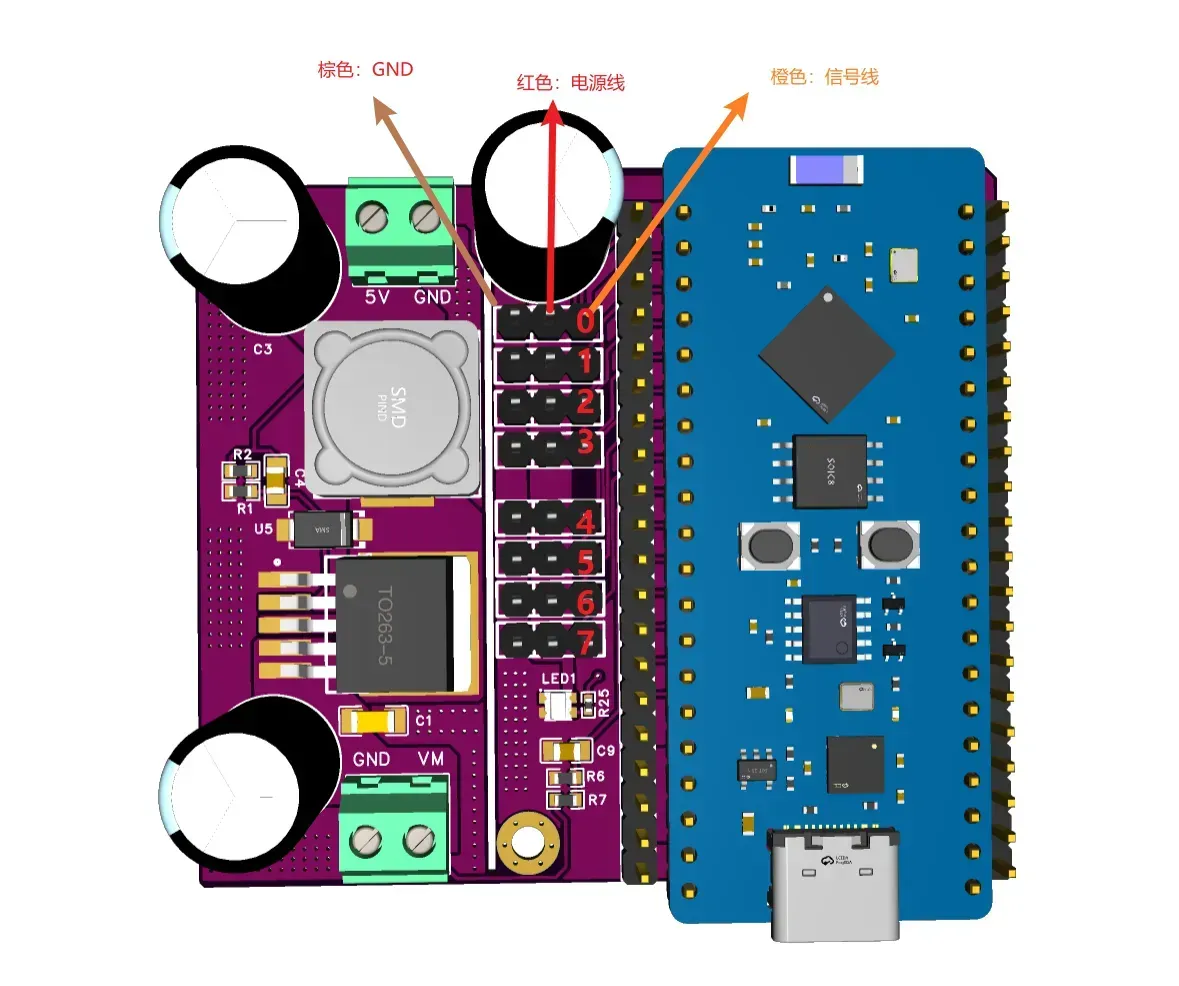
接线图
烧录代码
烧录固件
flashdownload工具这个工具是用来将代码烧录到芯片中的,一般由芯片原厂提供
单击下面得链接下载esp32固件下载工具
https://www.espressif.com.cn/zh-hans/support/download/other-tools?keys=&field_type_tid%5B%5D=842
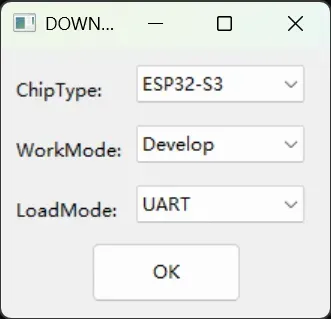
弹出下面这个框之后,选择esp32s3芯片
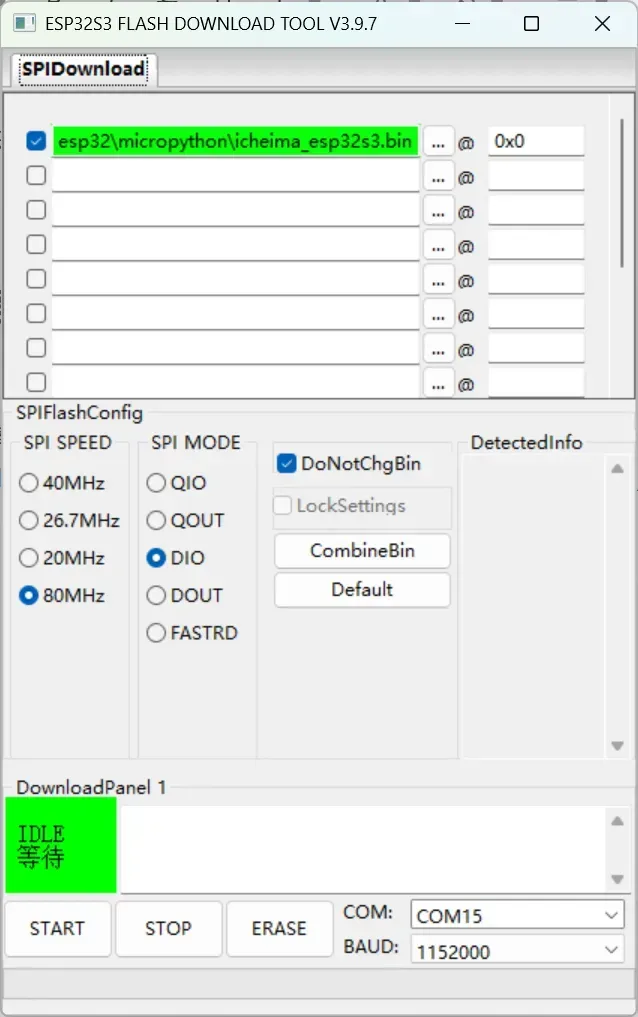
在下面这个框这里,选择我们要下载的固件,固件下载在下一个小结
上传代码
使用Thonny工具,将下面这个main.py上传到单片机中
|
1 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
其它 |
|
前进 |
左转 |
右转 |
停止 |
呼吸 |
上下 |
跳 |
你好 |
前蹦跶 |
跳舞 |
站立 |
调试
1. 连接热点icheima_kame
要想与Esp32进行通信我们首先得让我们的电脑和ESP32处于相同的局域网中,打开电脑wifi搜索,找到icheima_kame,无需输入密码即可连接成功。
2. 发送命令
打开串口调试工具,连接到esp32,然后发送对应的指令

参考指令如下:
|
1 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
其它 |
|
前进 |
左转 |
右转 |
停止 |
呼吸 |
上下 |
跳 |
你好 |
前蹦跶 |
跳舞 |
站立 |
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论