

专业版
【MPS机器人挑战赛作品】关节电机FOC驱动板(软硬件全开源)
3.8k
0
0
17
简介
本项目参加2025 MPS“智驱未来”机器人芯动力设计挑战赛,制作一款关节电机驱动板FOC驱动板。实现电流环、速度环、位置环。
简介:本项目参加2025 MPS“智驱未来”机器人芯动力设计挑战赛,制作一款关节电机驱动板FOC驱动板。实现电流环、速度环、位置环。开源协议
:GPL 3.0
创建时间:2025-10-30 09:23:54更新时间:2026-04-09 14:35:18
描述
工程复刻福利
想快速复刻本关节电机工程?特联合MPS为开发者提供免费样品申领福利,工程同款芯片直接送,帮你零成本启动项目开发!可通过下方二维码或点击链接直接申领 app-u.jingsocial.com/surl/JNH9Kul

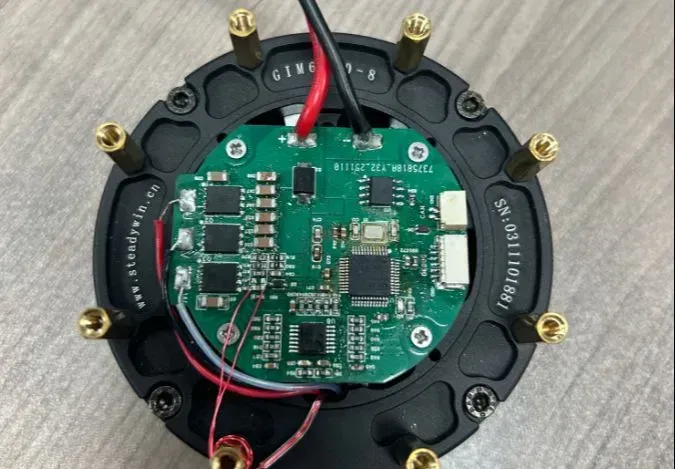
主控芯片为STM32G431CBT6,采用MPS的(MP6539GF-Z)栅极驱动芯片和(MA600GQE)磁编码器,支持12V-60V电源输入,MP6539自带过流保护。软件和部分硬件上参考了flose大佬的开源工程,因此软件也会开源(软件写的比较匆忙,有不合理的地方,欢迎各位大佬指正错误)。
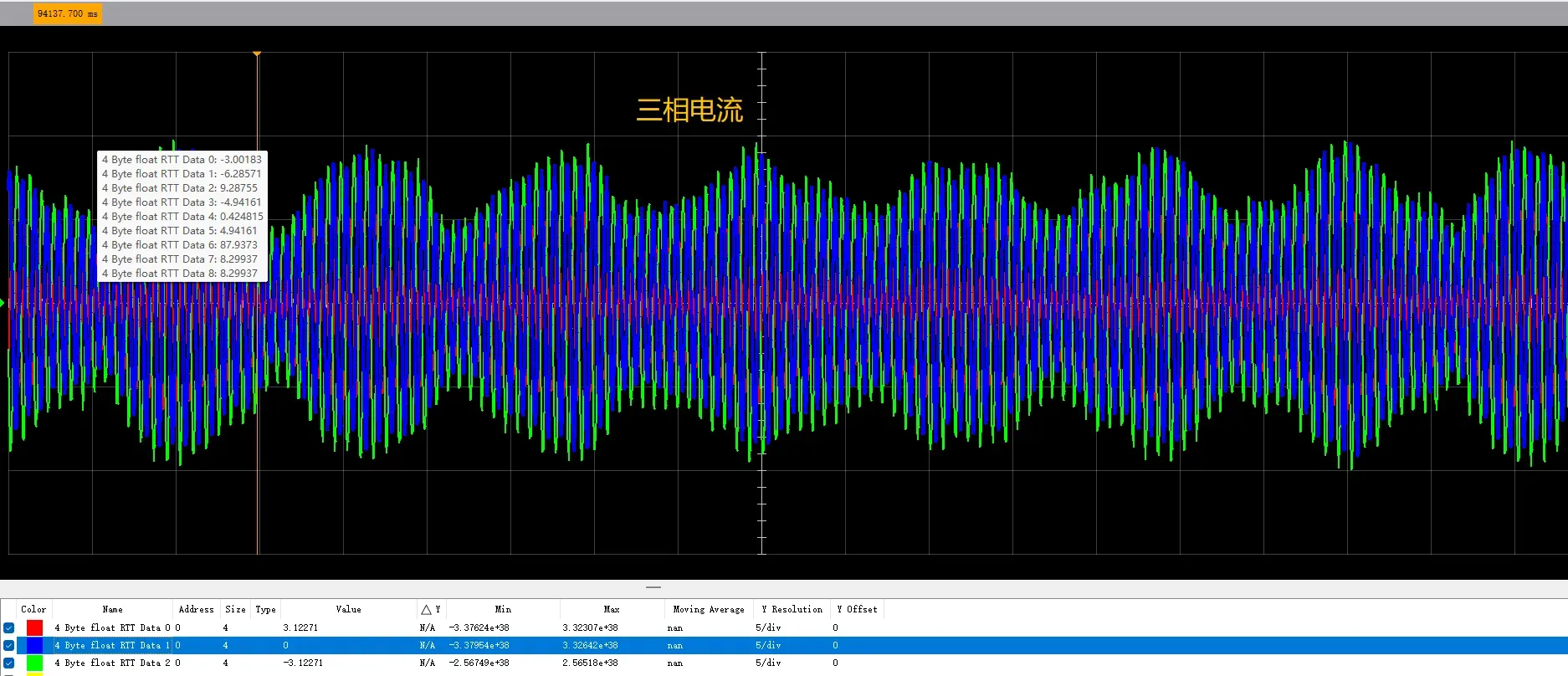
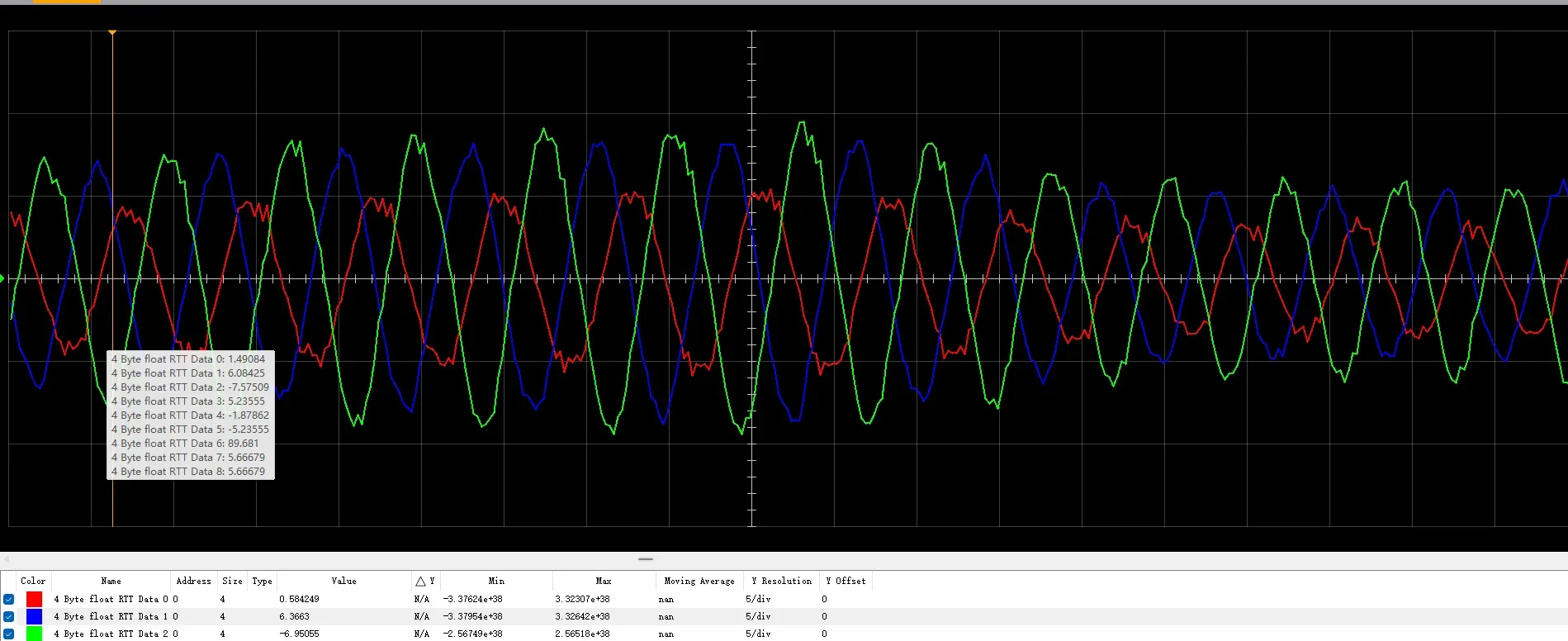
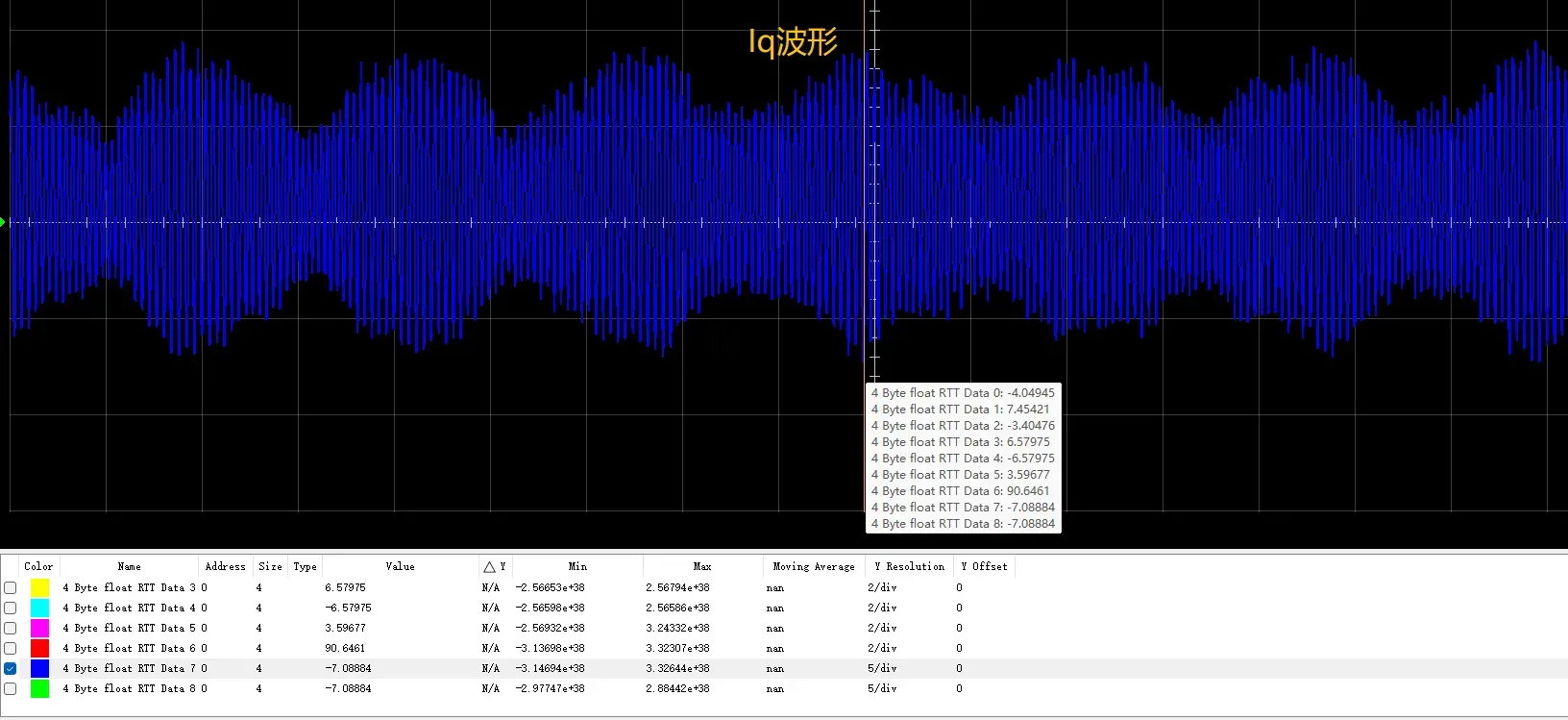
注意事项:由于本人刚学习FOC驱动,能力有限,目前电流环控制不稳定,会产生振荡,且三相电流幅值不相同,电机容易发烫,望大佬可以指点一下思路!
问题1:D2选错了,耐压只有33V,要用耐压50V以上,推荐C41411517杰盛微的,还能领券16-15。
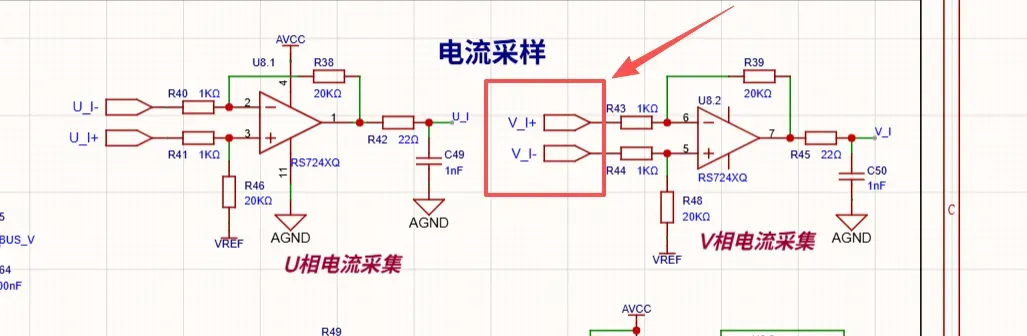
问题2:原理图的V相电流画反了,V+和V-需要对调一下!!!
速度环:
特此感谢MPS、嘉立创和伺泰威电机对本次活动的大力支持!
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论