

微型减速伺服【全网第二小尺寸】
简介
这是开源的微型减速伺服。自研减速箱,支持齿轮间隙。电驱一体中空伺服尺寸是φ29*25mm,PCB尺寸φ27mm,是全网第二小的尺寸。最低转速0.015rps约1rpm,位置环控制精度是0.05°
简介:这是开源的微型减速伺服。自研减速箱,支持齿轮间隙。电驱一体中空伺服尺寸是φ29*25mm,PCB尺寸φ27mm,是全网第二小的尺寸。最低转速0.015rps约1rpm,位置环控制精度是0.05°开源协议
:GPL 3.0
描述
项目说明
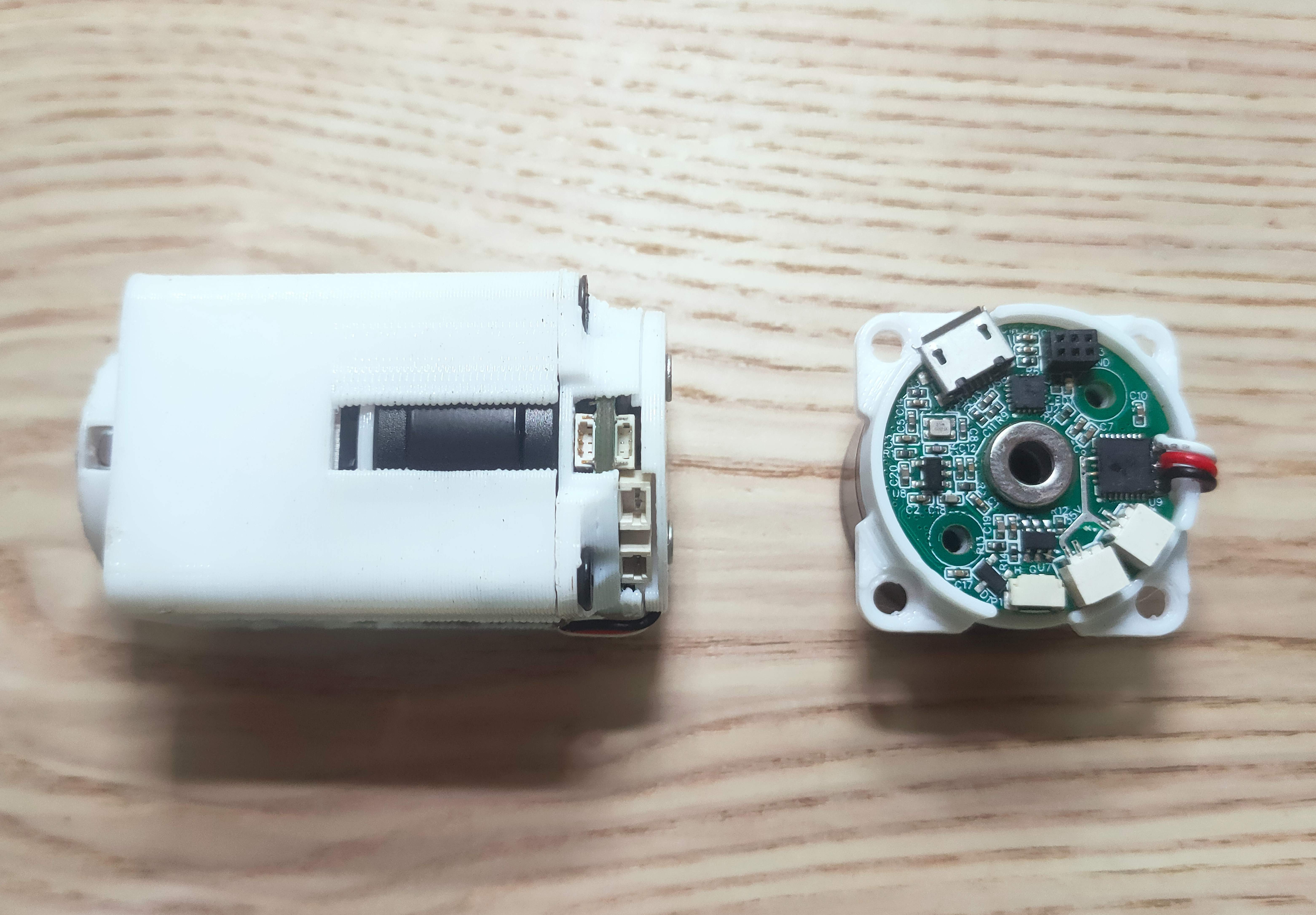
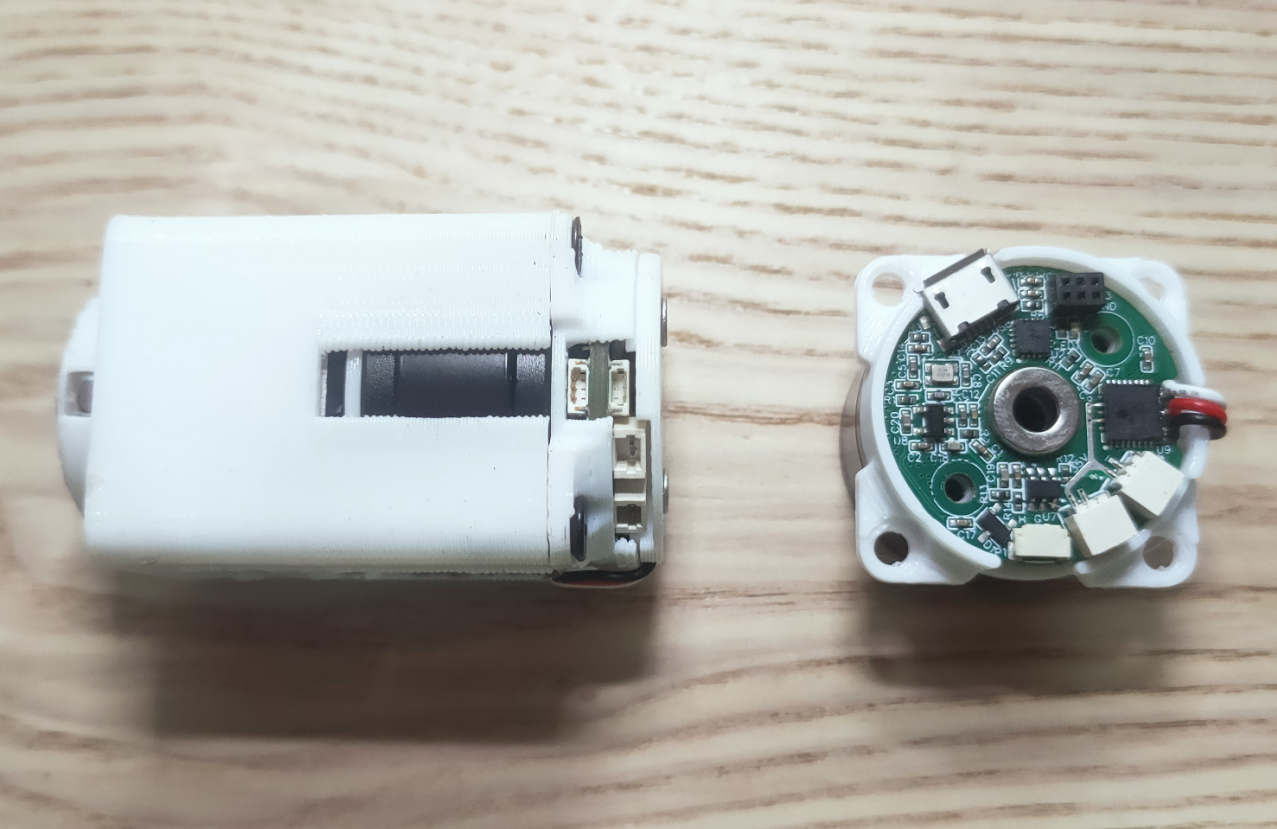
这是开源给DIY爱好者的微型减速伺服整体尺寸30*30*53mm。自研减速箱减速比81,也可以做成9,箱体由嘉立创加工的铝基板零件和PC材质3D打印零件组成,通过调节实现零间隙。动力源是FOC驱动的中空云台无刷电机型号BM2916H。这电驱一体中空伺服电机尺寸是φ29*25mm,PCB尺寸是φ27mm,做到了全网第二小的尺寸。。第一最小那个电机是定制的,买不到。。。。
视频介绍网址https://www.bilibili.com/video/BV1mF41127Bm/
开源地址https://gitee.com/qiaoge_soruce/foc_micro_driver
这个项目开源了PCB、3D模型、五金件BOM、调试说明文件、铝基板零件PCB和手搓的FOC控制程序。
开源协议: GPL3.0
电路说明:
主控采用STM32G473CCU6,磁编码采用MA730,预留第二个编码器接口。电机驱动芯片使用MP6540,支持最大电流3A的低KV值云台电机。5Mbps 双can,双电源接口支持电机串行连接方便接线。PCBA耐压达到35V,通讯接口有防静电,防浪涌保护,稳定性好。


程序说明:
代码采用C语言编写,提供Keil5工程文件。电机电流环频率20000Hz,3路电流采样处理使输出功率达到100%(2路采样不能100%)。电流环使用卡尔曼滤波(低侧电流采样需要滤波),速度环采用锁相环测速数据(锁相环相当于低通滤波),位置环使用磁环偏移校正数据(磁环安装偏移和充磁偏移会导致电角度与机械角度之间误差)。代码集成自动校准角度算法、odrive抗齿槽转矩算法、自研电角度预测补偿算法(有点用)、磁环偏移扫描等功能。通讯使用odrive的cansimple修改而成。
在这一系列算法加持下电机最低转速能到0.015rps约1rpm,位置环控制精度是0.05°。
参数设置是通过USB连接电机使用letter-shell命令行交互,电机运行参数通过串口log反馈。因为我不会写上位机。。。


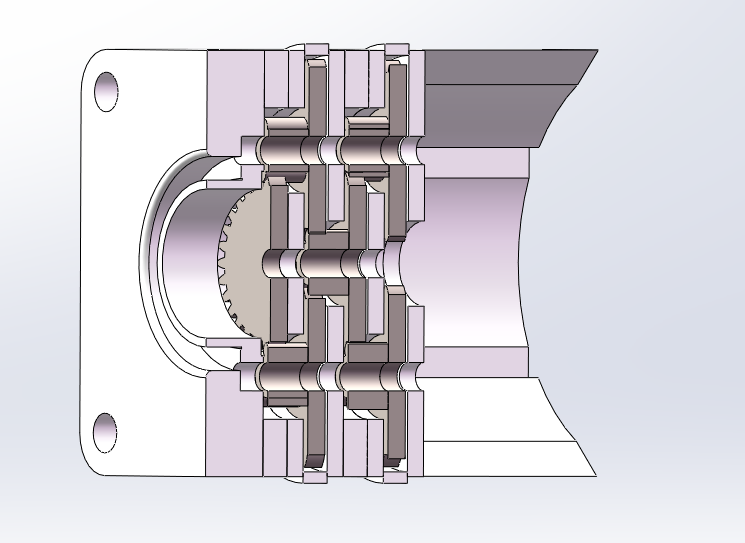
减速机说明:
自研直齿轮减速机,减速比只有81和9。81的适合做机械臂,9的适合做机械狗。减速箱承力关键部件用嘉立创加工的铝基板替代机加,工降低DIY成本。0.4模10比30双层齿轮市面上找不到合适所以去定制粉末冶金模具加工得到(真是拼了)。最后迭代做到了通过顶丝调节达到几乎0背隙。


铝基板绝缘层是特氟龙图层,正是很好的自润滑材料。
安装图
项目属性
本项目为首次公开,为本人原创项目。项目未曾在别的比赛中获奖。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









