


一款基于esp32cam的迷你桌面宠物机器人豆仔Beanbot
简介
这是一款高性价比的桌面宠物机器人,总成本不足四百元,它以esp32为主控,借助pc端运行深度模型进行控制,内置成长系统,能够在与主人互动过程中逐渐增加熟悉度。
简介:这是一款高性价比的桌面宠物机器人,总成本不足四百元,它以esp32为主控,借助pc端运行深度模型进行控制,内置成长系统,能够在与主人互动过程中逐渐增加熟悉度。开源协议
:GPL 3.0
描述
项目介绍
这是一款高性价比的桌面宠物机器人,总成本在四百元以内,它以esp32为主控,借助pc端运行深度模型进行控制,内置成长系统,能够在与主人互动过程中逐渐增加熟悉度。它的外形为椭圆的黄豆形状,以两个后驱的主动轮和一个前置的万向轮进行移动,后背有一个透明的罩壳,可用于存放小物品,额头上的小摄像头是它的眼睛,用于感知这个世界。它的胸部是一个距离传感器,用于躲避障碍物和悬崖。
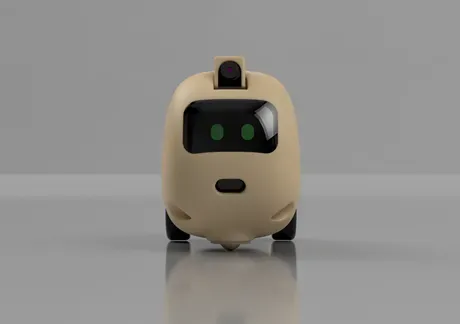 豆仔机器人正视图
豆仔机器人正视图
产品功能:
(1)连接wifi远程图传遥控
(2)自主移动避障
(3)显示表情表达喜怒哀乐等情绪
(4)连接PC端可实现智能互动
产品设计思路
本产品的设计思路如下:
以esp32cam为下位机控制底层硬件,比如驱动机器人的电机和舵机使之产生相应的动作,同时收集传感器采集的信息如激光测距传感器所测的距离、摄像头采集的图像、mpu6050采集的姿态信息等。同时esp32与电脑通过蓝牙或wifi通信,将传感器的数据回传至电脑中,而电脑则将控制电机、舵机的信号发送给机器人。在PC端运行深度学习模型,以传感器的数据为输入,以执行器的数据为输出,经过一定数据量的训练后让模型能够实现一定的自主互动。后续也可通过接入deepseek、豆包等大模型实现智能化。
以下将从产品造型、机械结构、底层硬件、MCU软件、PC端顶层算法六个方面展开介绍。
产品造型
如图所示为机器人3d模型的渲染图,其外形是通过fusion360自由造型功能设计而成的,整体采用了圆润清新的、小巧可爱的科幻风格,机器人通身为与小麦颜色接近的淡黄暖色调,形象如同一颗长着三个车轮的黄豆。整体采用光敏树脂进行3D打印而成,机器人面部和背部透明部分则采用透明树脂,机器人的头部有一个可以俯仰的摄像头,充当机器人的“眼睛”,机器人胸部有一个朝向前下方的激光测距传感器,用于避开障碍物和悬崖,下方凸出部分则是一个万向轮,机器人后方左右各有一个主动轮,用于移动,通过差速的方式进行转弯。机器人面部使用了1.3寸的oled屏幕,其眼睛为绿色椭圆形。
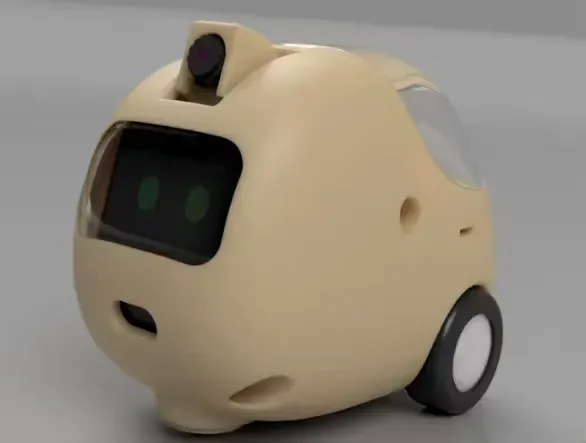
豆仔机器人
机械结构
如图所示为机器人的侧面透视图,舵机通过连杆驱动摄像头转动,采用的是曲柄摇杆机构,其中连接舵机的杆比连接摄像头的杆短,因而能起到减速的作用,从而提高摄像头转角的精度。舵机的左侧为一块小锂电池,用于给机器人供电,电池左边为oled屏幕,用于显示机器人的表情,舵机下方为电机驱动和mpu6050陀螺仪,舵机右方为esp32cam主控,主控下方为扩展板,再下方则是两个小型减速电机,用于驱动车轮行进。车的前方下部为一个万向轮,用于平衡整个车底。
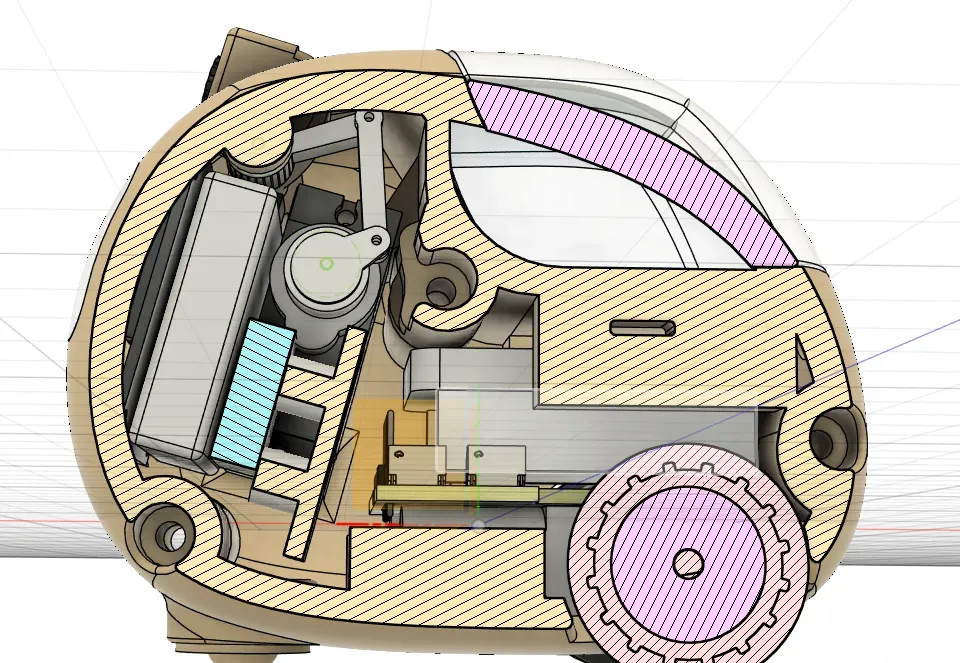
侧面结构剖视图
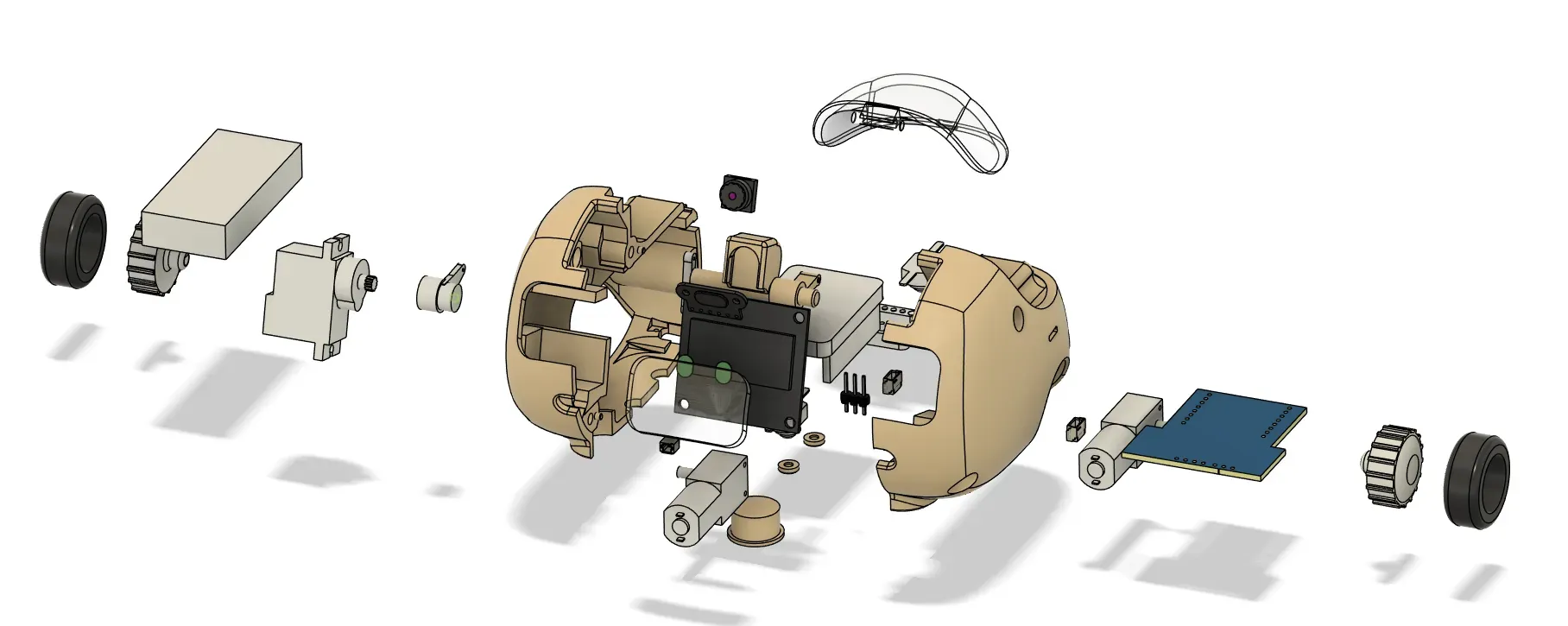
爆炸图
底层硬件
如图为esp32cam扩展板的原理图,其主要作用是连接主控和mpu6050、laser等传感器,以及下载程序和与串口通信电脑,方便调试程序代码使用。图为硬件布局示意图,esp32cam向舵机和电机驱动以及oled屏幕发送信号,从laser激光测距传感器和mpu6050陀螺仪以及ov2640摄像头收集信号,之后esp32cam与上位机采用udp、mqtt、蓝牙三中通信方式之一进行通信,具体通信方式视可具体情况而定。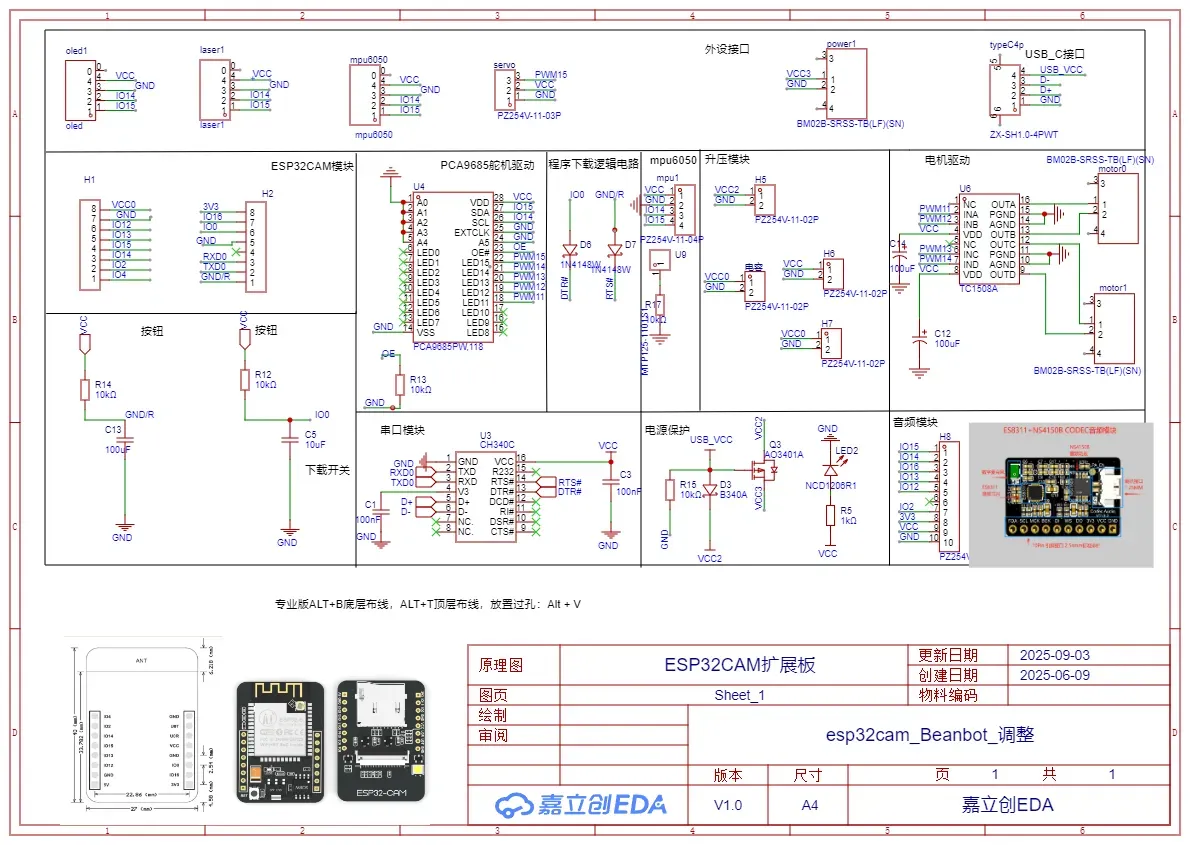
原理图
MCU通信设计
采用arduinoide编写和编译代码,程序主要功能是通过iic协议与mpu6050、oled、laser进行通信,通过控制四个引脚输出的高低电平控制两个电机的转向和速度,通过pwm控制舵机转角,通过wifi将ov2640采集的图像以及所有从传感器采集的数据传输给电脑,并将电脑发送来的执行信号比如oled应该显示的图像以及电机驱动电平和舵机角度等信息输入到相应的执行器中,如图所示。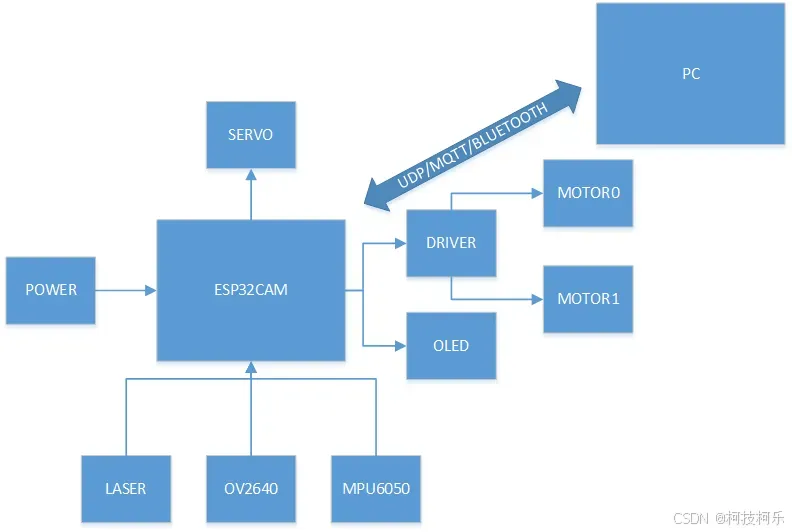
通信示意图
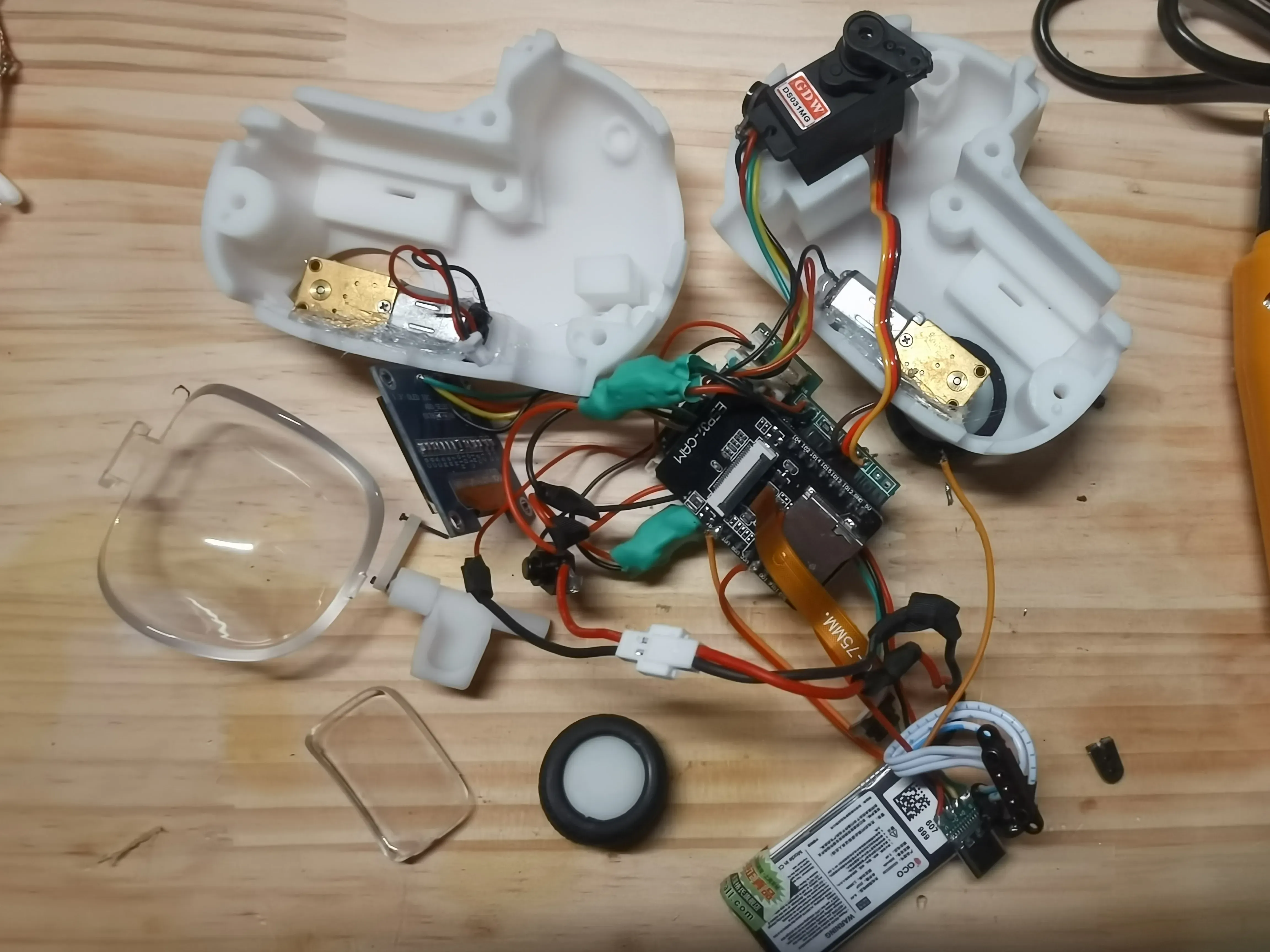
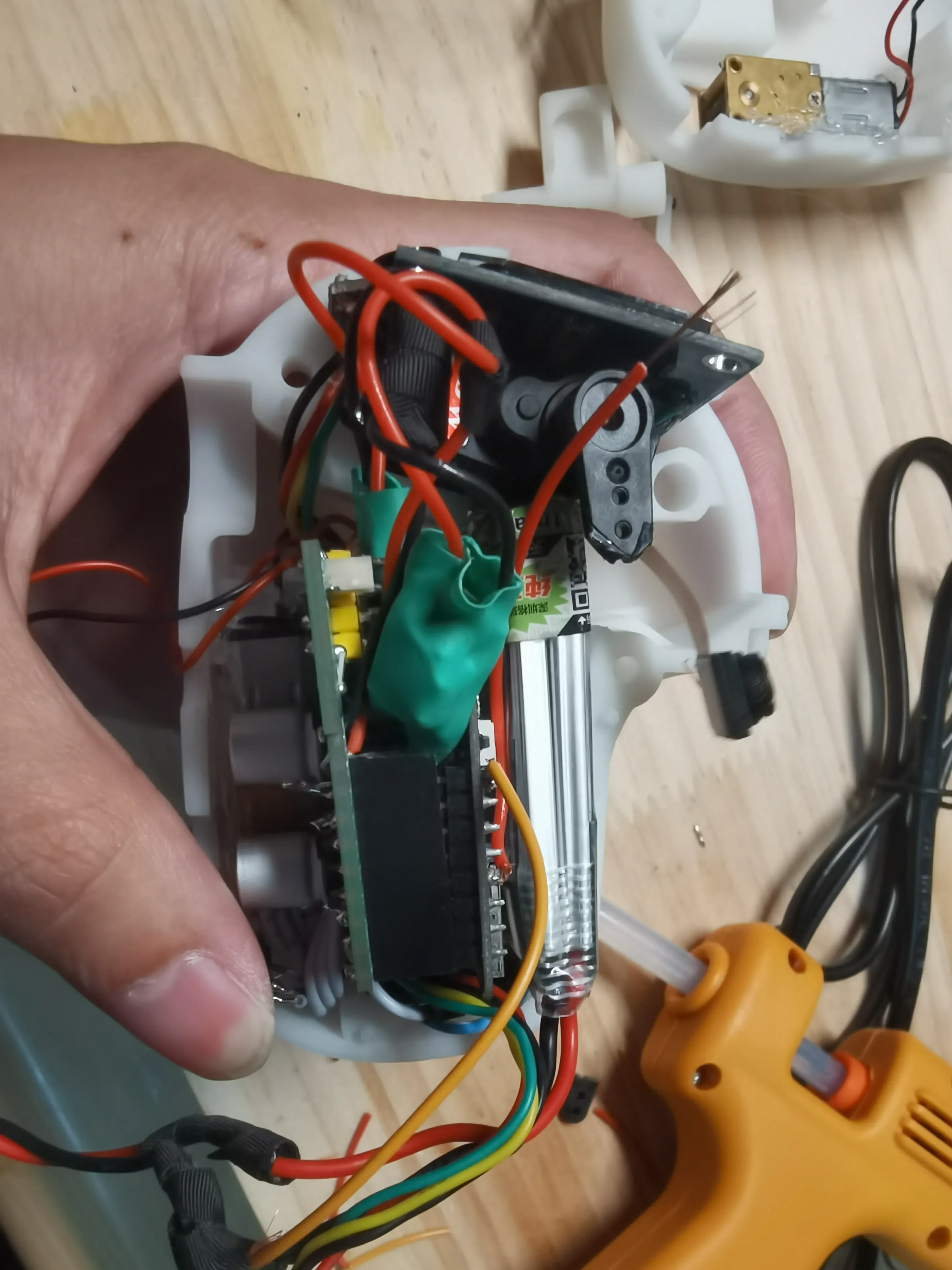
实物展示






物料清单
嘉立创平台内
| No. | Quantity | Comment | Designator | Footprint | Value |
| 1 | 1 | 100nF | C1 | C1210 | 100nF |
| 2 | 1 | 100nF | C3 | C1206 | 100nF |
| 3 | 1 | 10uF | C5 | C1206 | 10uF |
| 4 | 2 | 100uF | C12,C14 | CAP-SMD_BD8.1-L8.3-W8.3-LS9.3-FD | 100uF |
| 5 | 1 | 100uF | C13 | C1206 | 100uF |
| 6 | 1 | B340A | D3 | DO-214AC_L4.3-W2.4-LS4.7-RD | |
| 7 | 2 | 1N4148W | D6,D7 | SOD-123_L2.7-W1.6-LS3.7-FD | |
| 8 | 2 | HDR-F-2.54_1x8 | H1,H2 | HDR-F-2.54_1X8 | |
| 9 | 4 | PZ254V-11-02P | H5,H6,H7,电容 | HDR-TH_2P-P2.54-V-M | |
| 10 | 1 | PZ254V-11-10P | H8 | HDR-TH_10P-P2.54-V-M | |
| 11 | 1 | laser1 | laser1 | CONN-SMD_BM04B-SRSS-TB | |
| 12 | 1 | NCD1206R1 | LED2 | LED1206-R-RD_RED | |
| 13 | 3 | BM02B-SRSS-TB(LF)(SN) | motor0,motor1,power1 | CONN-TH_BM02B-SRSS-TB-LF-SN | |
| 14 | 1 | PZ254V-11-04P | mpu1 | HDR-TH_4P-P2.54-V-M | |
| 15 | 1 | mpu6050 | mpu6050 | CONN-SMD_BM04B-SRSS-TB | |
| 16 | 1 | oled | oled1 | CONN-SMD_BM04B-SRSS-TB | |
| 17 | 1 | AO3401A | Q3 | SOT-23_L2.9-W1.3-P1.90-LS2.4-BR | |
| 18 | 1 | 1kΩ | R5 | R1206 | 1kΩ |
| 19 | 5 | 10kΩ | R12,R13,R14,R15,R17 | R1206 | 10kΩ |
| 20 | 1 | PZ254V-11-03P | servo | HDR-TH_3P-P2.54-V-M | |
| 21 | 1 | ZX-SH1.0-4PWT | typeC4p | CONN-SMD_4P-P1.00_MEGASTAR_ZX-SH1.0-4PWT | |
| 22 | 1 | CH340C | U3 | SOP-16_L10.0-W3.9-P1.27-LS6.0-BL | |
| 23 | 1 | PCA9685PW,118 | U4 | TSSOP-28_L9.7-W4.4-P0.65-LS6.4-TL | |
| 24 | 1 | TC1508A | U6 | SOP-16_L10.0-W3.9-P1.27-LS6.0-BL | |
| 25 | 1 | MTP125-1101S1 | U9 | HDR-TH_1P-V-M_XKB_X4611WV-01I-C28D40 |
嘉立创平台外
| 物品名称 | 数量 |
| 1.3寸oled屏幕 | 1 |
| mpu6050 | 1 |
| tof050距离传感器 | 1 |
| esp32cam | 1 |
| ov2640摄像头 | 1 |
| 减速电机 | 2 |
| typec母座 | 1 |
| 玩具轮胎 | 2 |
| MG90小舵机 | 1 |
| 3p磁吸接头 | 1对 |
| 4p硅胶端子线 | 若干 |
| 7.4v航模电池 | 1 |
| 2p端子线 | 若干 |
| 按钮 | 2 |
| M3*25螺丝 | 2 |
| M3*45螺丝 | 1 |
| M1*10螺丝2 | 2 |
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论