

KY001-基于HIP4082的双电机全桥驱动
简介
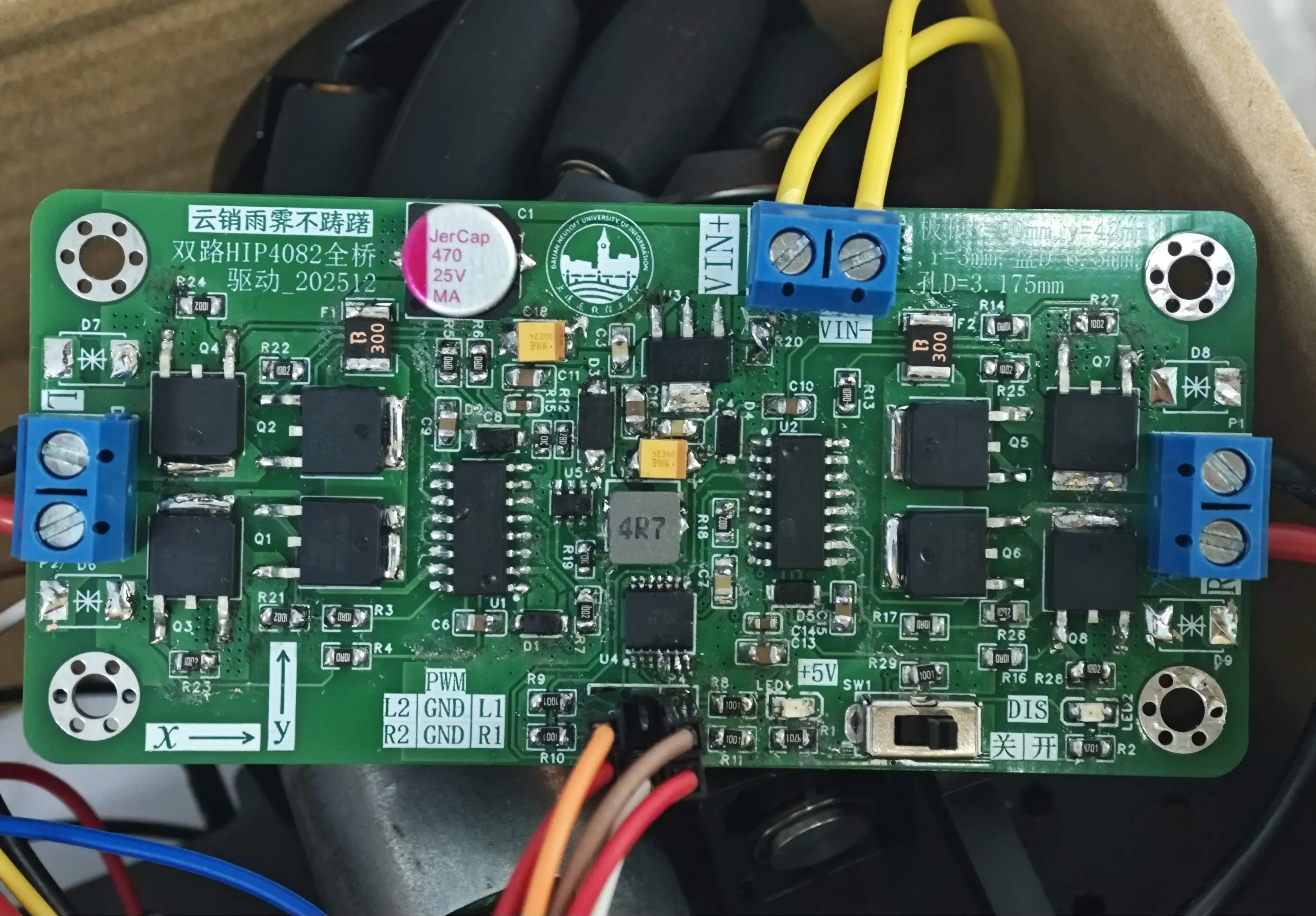
为智能车比赛设计的双路有刷电机驱动板。对标逐飞科技的双电机驱动模块。其中VBE1302为NMOS,HIP4082做栅极驱动,74HC125做信号缓冲器,SX1308用于5V升12V。
简介:为智能车比赛设计的双路有刷电机驱动板。对标逐飞科技的双电机驱动模块。其中VBE1302为NMOS,HIP4082做栅极驱动,74HC125做信号缓冲器,SX1308用于5V升12V。开源协议
:CC BY-NC 4.0
描述
布局布线(ver1)讲解视频
推荐输入输出参数
电源输入:12V及以下直流电、1A及以上带载能力(具体取决于所用电机)
过流保护:设计上,在使用F1、F2,耐压30V的、保持电流为3安、跳闸电流为5安的自恢复保险丝的情况下,为了应付最坏的情况,则电源带载能力应为10A以上,但这只是理论而言。实际上使用能满足电机启动及正常工作需要、带有过流保护功能的电源即可。
电机选用:考查逐飞科技淘宝店铺发现,其在售有刷电机的单个工作参数均为:12V以下、空载电流0.5-2A甚或更小。因此该工程设计上可适用于:12V及以下、空载电流2A及以下的有刷直流电机(单个参数)。
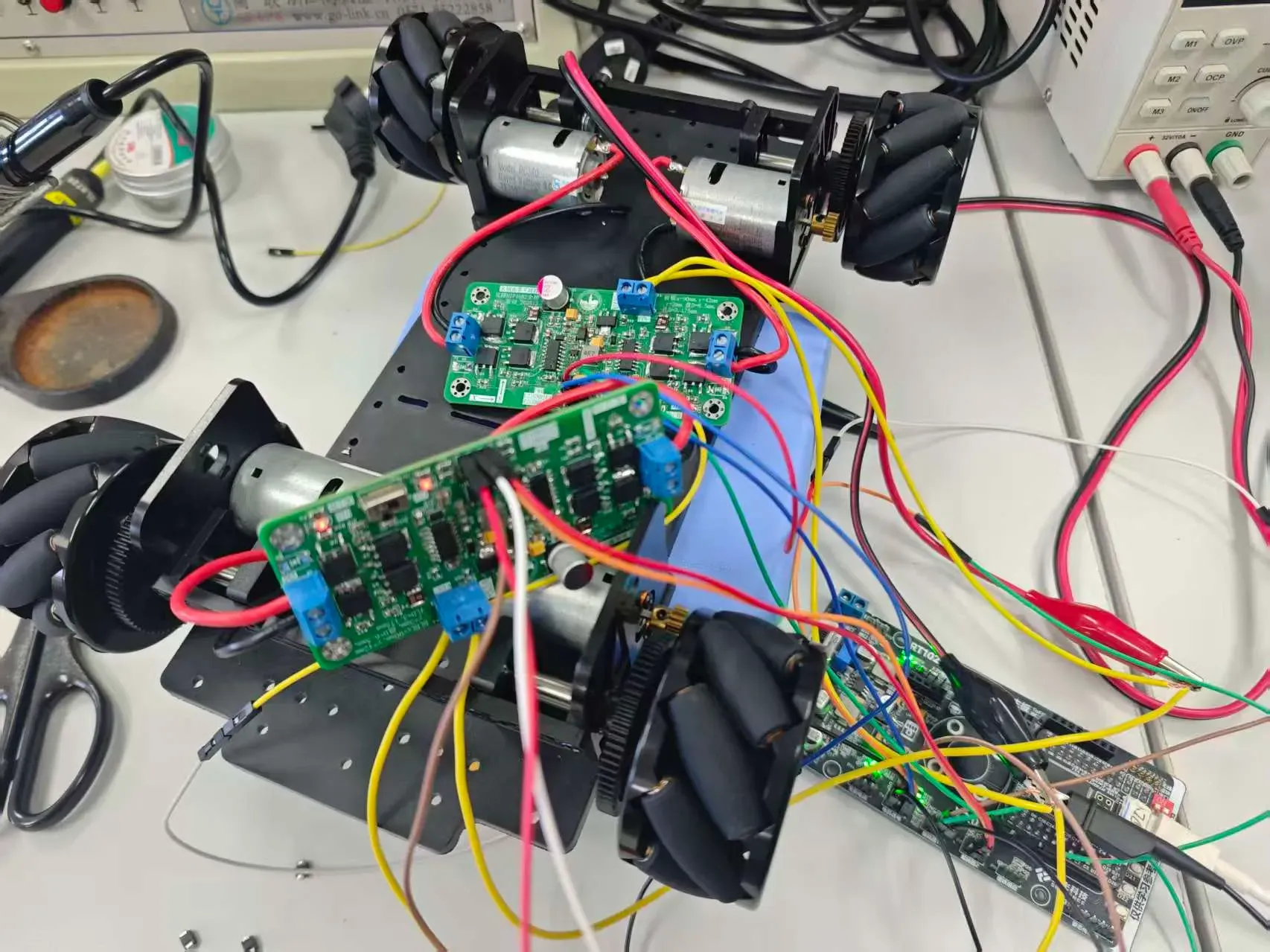
验证动态
当前为方案验证期间。电路板已焊接多块,电机能转,指示灯亮,板子未烧。
焊接注意事项
钽电容
钽电容实物中带线的那端是正极!不是负极!这在各种电容中是例外!
TVS
D6-D9不用焊接!当前原理图当中的D6-D9并不能如期起到保护作用,焊上会导致电机工作不正常,之后版本会进行改进。
R29
使能网络的下拉电阻R29疑似无需焊接,具体分析见后,但当前焊上后也没问题。
原理图设计部分说明
1、HIP4082使能相关电阻网络
通过改变HIP4082的DIS脚上的电平高低,可以直接控制电机输出的开闭,且对于HIP4082,为高电平关闭、低电平使能。若仅由三脚两档开关控制DIS连接到高电平(直连5V)还是低电平(直连GND),当滑动开关在动作时,存在短暂的时间,DIS既不接高电平,也不接低电平,处于电平未知的危险状态。部分带有使能功能的芯片内部能够处理这一状况,然而HIP4082的数据手册当中:
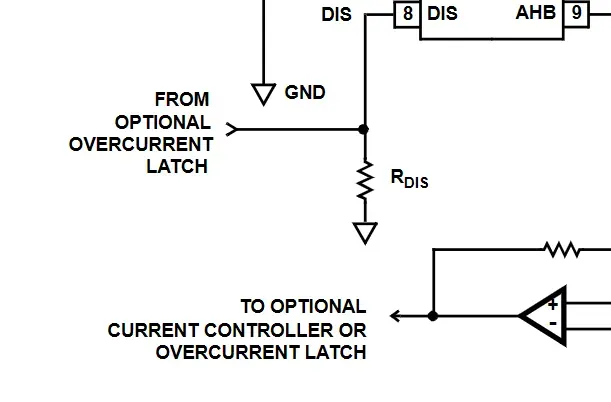
存在“RDIS”,这似乎暗示了必须要积极地处理这种情况。若在DIS网络上下拉电阻到地,即可使电平状态被确定。
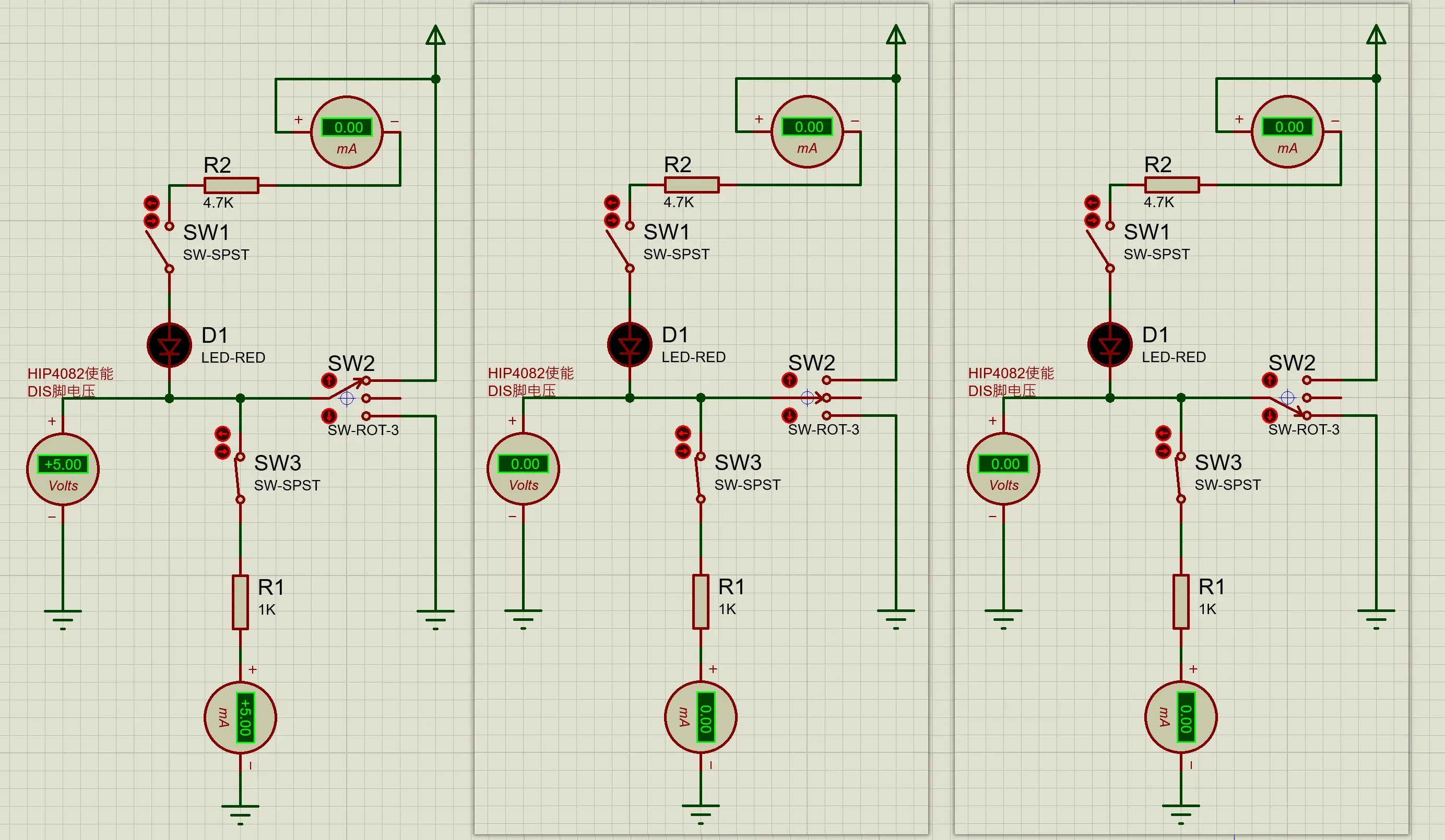
由上仿真图可见,DIS在高电平使能关闭时,竟有5mA电流流经R1被损耗掉。事实上,这种电阻的经验值通常为10K-100K。而这里选用1K,因为引入使能指示灯后,其限流电阻R2随即被引入到使能电阻网络当中,在确定R1的具体值时,必须要考虑R2带来的影响。
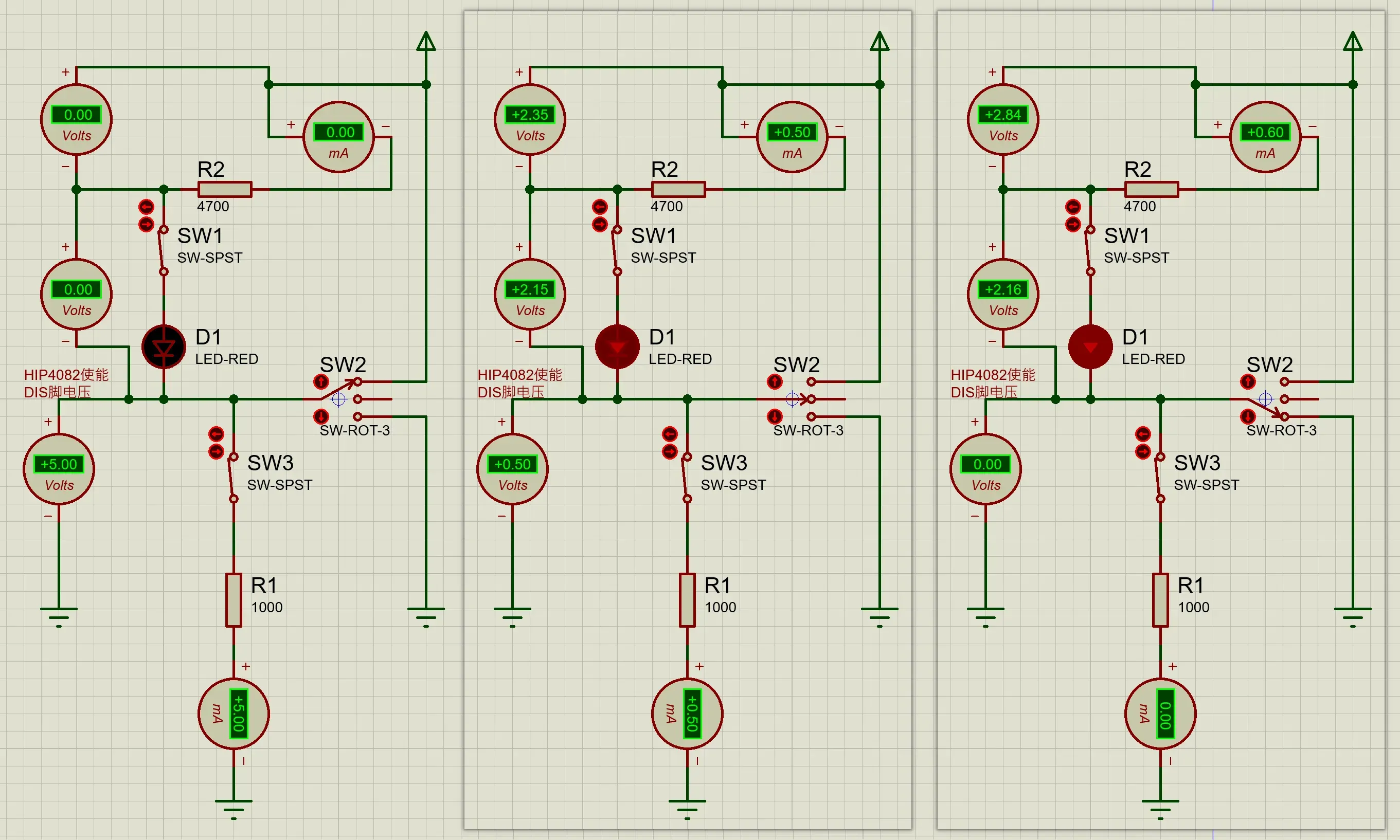
由上仿真图可见,考虑到R1、R2后,当DIS网络既不接高电平,也不接低电平时,其电压为0.5V,下面是计算:
(5V-D1正向压降2.15V=2.85V)*(1000Ω/(4700Ω+1000Ω))=2.85V*(10/57)=0.4999999……V
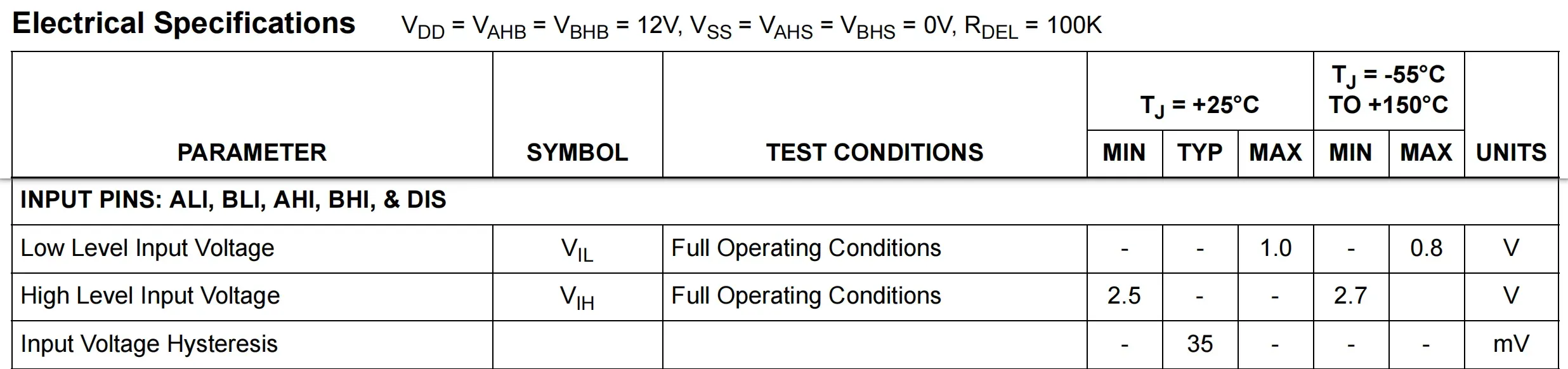
根据HIP4082数据手册(见下截图),DIS网络在
①TJ=+25℃时,最大1.0V
②全工作条件下,最大0.8V
及以下时,都会被认为是低电平,故0.5V左右也会被认为是低电平,使能打开。故这样设计理论可行。
写到此处时的思考:
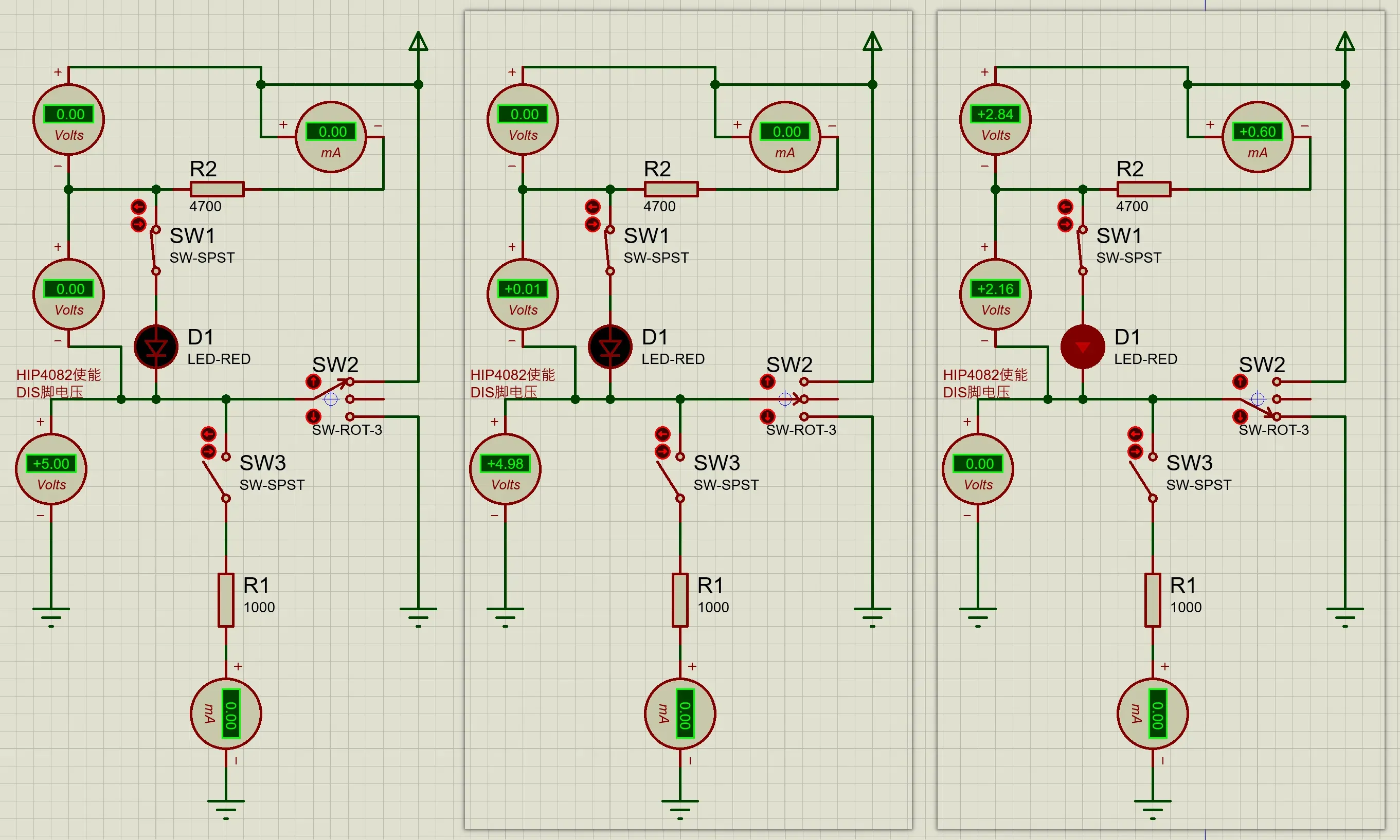
由上仿真图可见,若无下拉电阻,由于限流电阻R2的存在,DIS网络既不直接接高电平,也不直接接低电平时,其电平状态似乎也能被确定,为4.98V?值得实验!
待实验:R1(实际原理图中为R29)不焊,测量DIS网络电压,并观察各项功能是否正常?【尚未实验】
2、关于自恢复保险丝
为了避免电机堵转时产生的秒级大电流烧毁PCB,考虑F1、F2,为1812封装的耐压30V的、保持电流为3安、跳闸电流为5安的自恢复保险丝,串接在VIN与电机高侧之间。
3、关于TVS
为了保护NMOS,考虑到VBE1302的Vds为30V:
为了抑制电机启动时的瞬时电压尖峰和电流,考虑D6-D9,用反向截止电压18V、钳位电压29.2V的双向TVS到地。
这是初始设计,但焊接后经验证,发现这种做法不能如期起到保护作用,焊上反而会导致电机工作不正常,之后版本会进行改进。
一些苟且
1.系里的相关材料是按照一个老原理图的BOM准备的,多数阻容封装为0805,故我依然采用大部分为0805的封装,没有把这个板子继续做小
2.如上所述,故存在选用钽电容封装不一致、位号混乱等问题
3.焊接时只找到了较大封装的钽电容,没找到较小封装的,故焊上后不很美观
4.焊接时为手动焊接,没用加热台,故焊上后不很美观
5.本想整一个黑色的阻焊,但因时间紧张,就先放弃了
时间线
yyyymmddhh
2025120103创建讲解版工程
2025120510自己对着给定的原理图,提出了TVS、自恢复保险、地平面分割等改进点
2025120518在电子DIY社团培训时讲解,成为DNUI的嘉立创EDA校园讲师后的初次尝试
2025121018剪辑培训时的讲解视频并发布,时为版本ver1.0
2025121611着手ver2.0
2025122517完成ver2.0
2026010914创建开源版工程
2026010915完成ver2.1(对原理图有删改)
2026010917开源工程初次审核未通过
2026011119完善开源工程描述,提交审核
后续版本
ver2.2预计会:
·实验以确定R29的必要性,或调整DIS电阻网络的部分电阻阻值
·改进电路使TVS能够如期发挥作用
·更换部分接线端子为航模插头式
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论