


复刻嘉立创EDA-ESP8266机器狗
简介
跟学立创EDA-Robot机器狗开源项目,完整复刻硬件、软件、3D结构;可实现多种运动控制、情绪表情、天气拓展等。
简介:跟学立创EDA-Robot机器狗开源项目,完整复刻硬件、软件、3D结构;可实现多种运动控制、情绪表情、天气拓展等。开源协议
:GPL 3.0
描述
复刻立创EDA-Robot机器狗开源项目
一、背景简介
项目开始前,正在学习PCB相关知识,初出茅庐的小白,遇到嘉立创开源的机器狗项目,正好给了检验学习成果的机会,同时本着以练代学的目的开始实践,学习较为完整的设计流程、组成部分、疑难要点。
基础能力有限,下文内容为项目总结性分享,可靠性请自行甄别。
二、硬件部分
开源项目为了照顾初学者,友好的选用直插类型的元器件,方便焊接,价格便宜。
(一)主控电路
1.本项目采用ESP8266模组,其代表性的集成WiFi功能,给无线遥控机器狗提供必要条件。
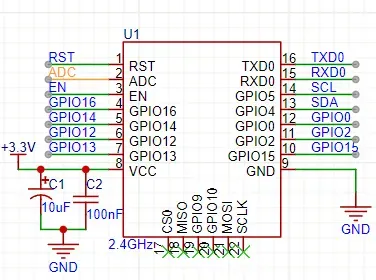
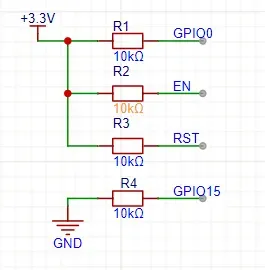
2.为满足主控芯片的正常工作,需按照数据手册要求,将EN、RST和GPIO0引脚上拉10k电阻,GPIO15下拉10K电阻。
顺便一提,项目总共使用12个直插电阻,其中10K电阻11个,方便了物料准备工作。
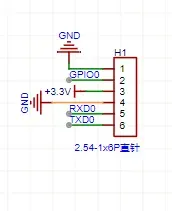
3.烧录接口,除了只是为了看着它沉思,不打算和它沟通,倒是可以省略烧录接口。
这里的IO0与GND短接,便可以进入烧录模式。
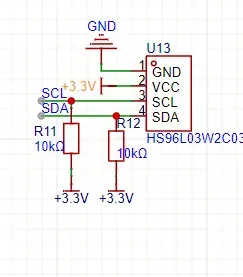
(二)交互电路
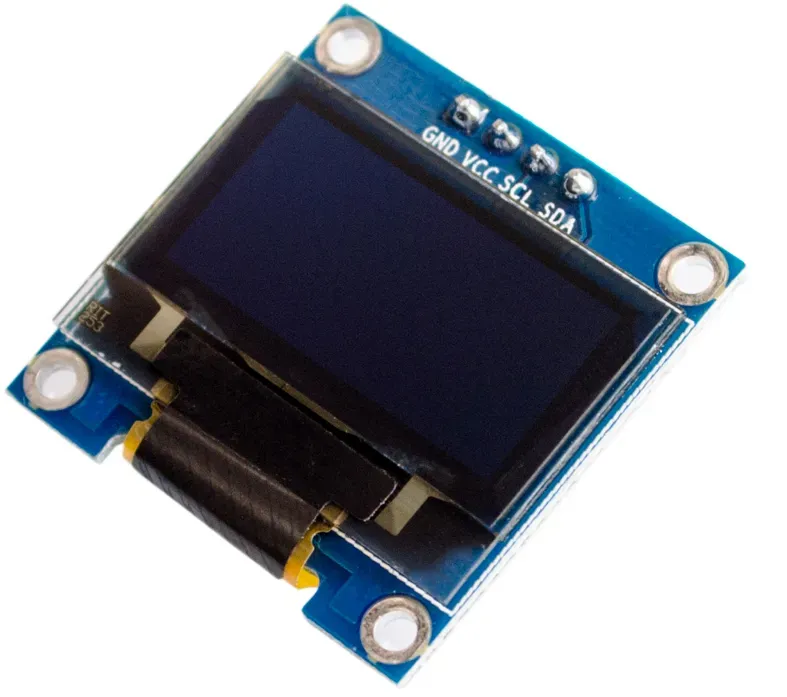
1.屏幕采用0.96寸的OLED屏幕,注意!这里要使用GND开头的,如果手头上现有的屏幕是VCC开头的注意更改电路,否则
机械狗会给你表演黑脸的。
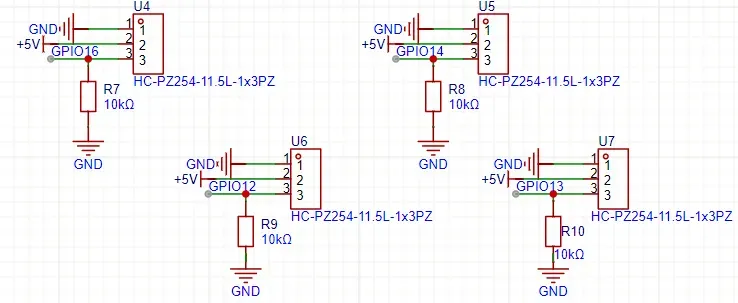
2.机器狗的四条腿选用的是SG90S舵机,这里因没有经验,方便跟敲代码,选择了180°旋转角的舵机,360°的舵机需要额外校验步骤。
另外机器狗上电后,舵机会有轻微的抖动现象,为确保在收到指令前,处于静止状态,源项目推荐使用10K下拉电阻。
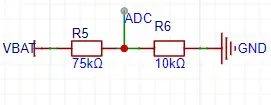
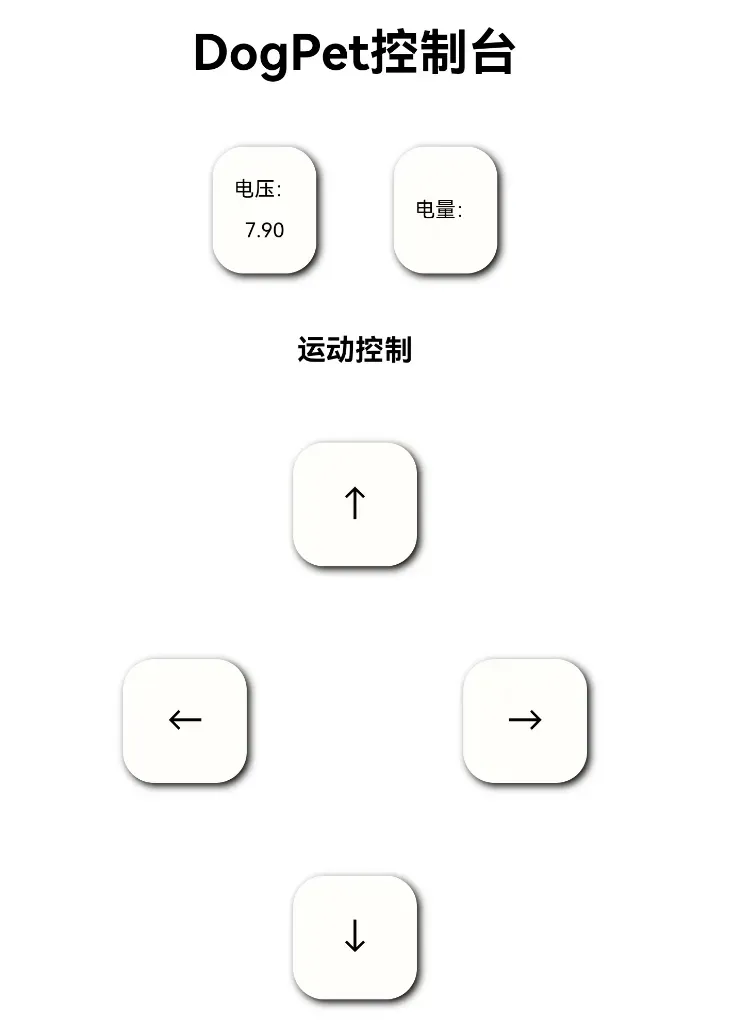
3.ADC电量监测,实时了解机器狗电池电量,操控界面的电量值也是取自这里。
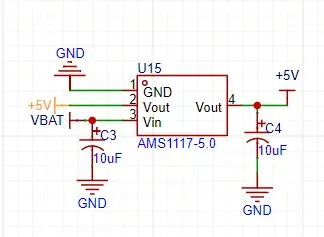
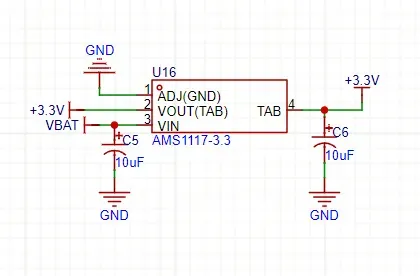
(三)电源电路
1.项目需要5V驱动舵机,3.3V给主控供电,所以使用了经典的AM1117-3.3V和5V线性稳压器。
2.项目用的是两节14500锂电池串联,电池盒为插件式。
三、软件部分
软件部分,完全是跟敲,使用VsCode编辑器,配合PlatfromIO开发插件,这里大部分代码作用是不理解的,就算是跟敲,也出现了许多报错,出现联网失败、按钮没反应以及页面不跳转等问题,在复查的过程中,借助AI,结合实际功能,有助于理解代码用意。
代码就不贴了,感兴趣的朋友可以搜源项目视频,内容更专业,以下内容仅供自己梳理思路。
(一)main.cpp
1.包含12个库文件
#include //Arduino库文件
#include //舵机库文件
#include //U8g2显示驱动文件
#include //IIC库文件
#include //spiffs文件系统库
#include //WIFI库
#include //WebServer异步库
#include //HTTP请求库
#include //NTP同步库
#include //Json文件处理库
#include //UDP库
#include "image.cpp"//表情库
2.创建15个函数接口
void handleWiFiConfig()//创建Web路由
void loadWiFiConfig()//读取保存在FS文件系统的WIFI信息
void fetchWeather()//获取天气信息
void front()//前进
void back()//后退
void left()//左转
void right()//右转,
void sitdown()//坐下
void lie()//躺下
void toplefthand()//举起左手
void toprighthand()//举起右手
void left90()//舵机集体左转90度
void right90()//舵机集体右转90度
void setup()//初始化
void loop()//运行
(二)imge.cpp
源项目推荐的取模软件无法运行,使用ATK_XFONT.exe 也挺便捷。
(三)页面开发
1.index.html

2.control.html
3.setting.html

四、结构部分
(一)这部分在充分考虑空间尺寸,可以准确安装硬件的基础上,可以进行创新,机械螃蟹,机械花盆等等,随你天马行空。软硬件部分其实也可以创新,拓展新功能,奈何基本功薄弱,处处小心,无法创新了,就在结构部分,加了俩耳朵。
五、回顾总结
本次跟学立创EDA开源的机器狗项目,小白视角,从零开始,定义目标,规划电路原理图,设计PCB,打样,焊接,编程,烧录,调试等,收获颇丰,成就满满,接下来再接再厉,补齐短板,争取早日能够独立开发项目,就这样,祝大家生活愉快。
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论