

双A4988拓展版
简介
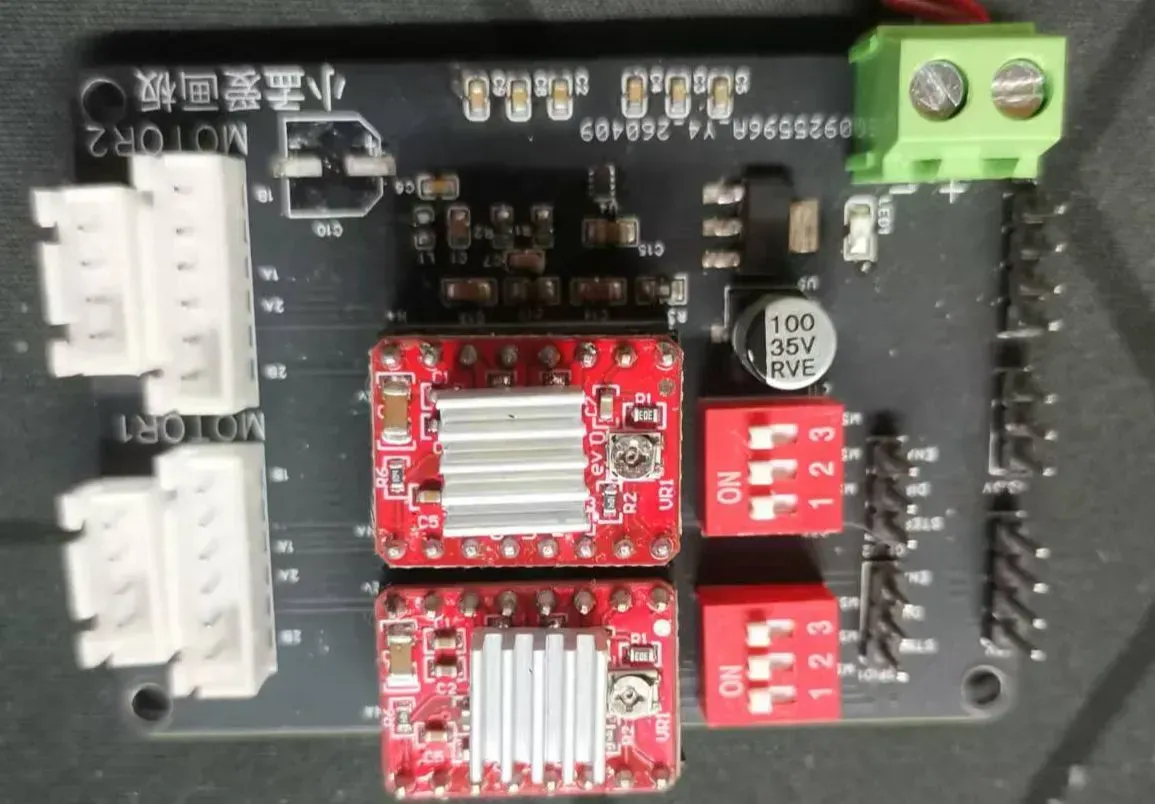
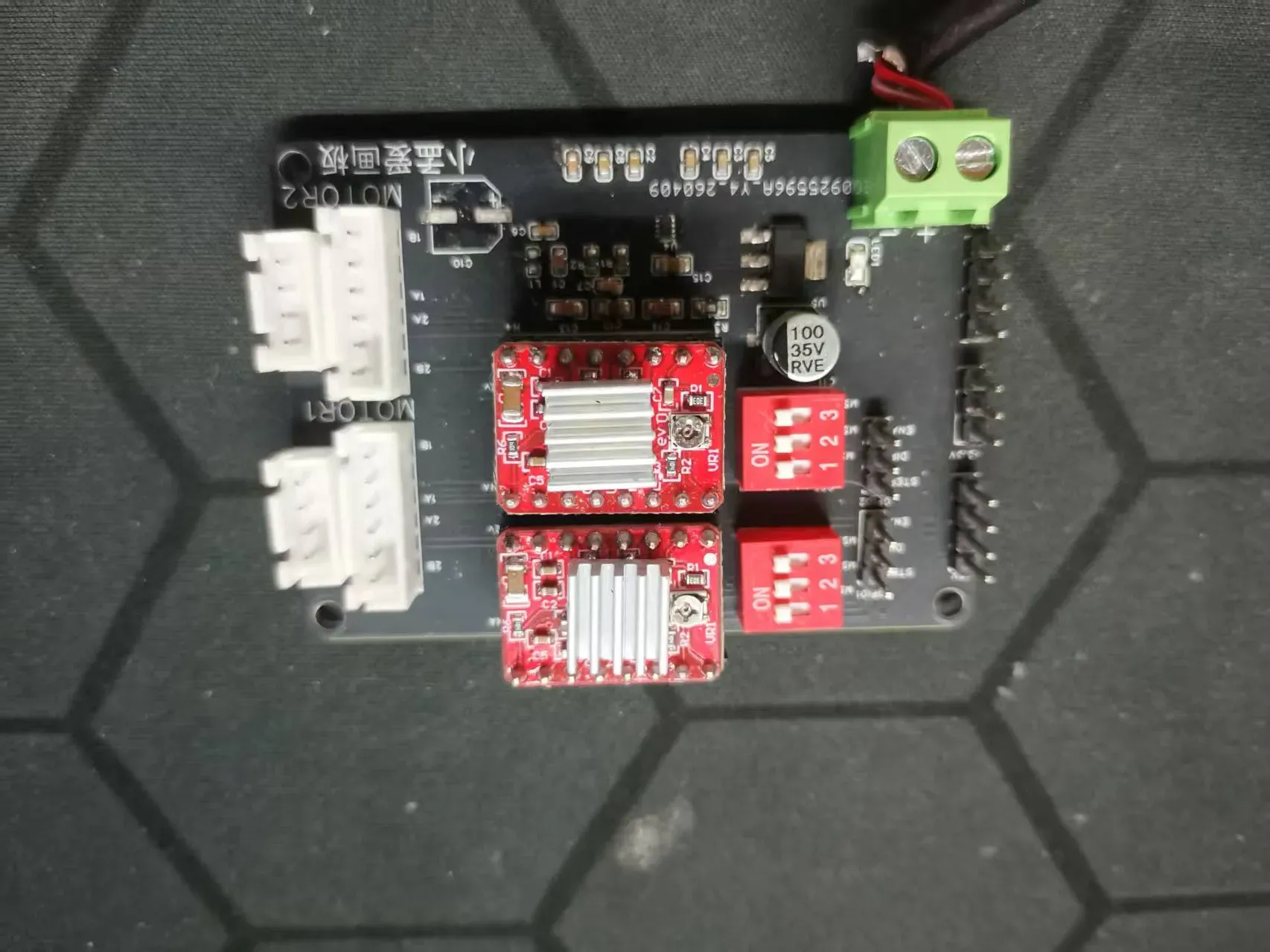
这是一个A4988双路驱动模块儿,它集成了12伏降五伏,降3.3,直接由12伏输入降压之后供给模块儿,支持细分调节,经过了测试,很稳定
简介:这是一个A4988双路驱动模块儿,它集成了12伏降五伏,降3.3,直接由12伏输入降压之后供给模块儿,支持细分调节,经过了测试,很稳定开源协议
:OpenAtom OHL 1.0
(未经作者授权,禁止转载)描述

|
ENA用于打开或者关闭fet(场效应管)输出,电位高将禁用输出 |
VMOT电机输入电源8-35v必须并联去耦电容>47uf |
|
MS1接开关连5v |
GND电机输入电源 |
|
MS2接开关连5v |
2B连接电机线圈B |
|
MS3接开关连5v |
2A连接电机线圈B |
|
RESET低电平忽略所有step引脚输入直接接sleep以便使她为高电位 |
1A连接电机线圈A |
|
SLEEP待机引脚,低电平待机高电平工作 |
1B连接电机线圈A |
|
STEP(步进)(一个脉冲转一步)接单片机 |
VDD逻辑电源正极3-5v |
|
DIR(旋转方向)接单片机 |
GND逻辑电源负极 |
注:
1.ms123全断开驱动器是全步模式
- 3D打印机/雕刻机(最常用:1/16步)
- MS1 → 5V
- MS2 → 5V
- MS3 → 5V
- 效果:运行最静音、最平滑,定位精度最高
- 大扭矩高速场景(全步)
- MS1 → GND
- MS2 → GND
- MS3 → GND(直接三个都悬空也可以)
- 效果:扭矩最大,速度最快,但低速振动大、噪音大
- 平衡性能(1/4步)
- MS1 → GND
- MS2 → 5V
- MS3 → GND
- 效果:精度、扭矩、噪音都比较均衡,适合多数机器人底盘
4.电平一致性:
MS引脚的高电平必须和控制器IO电平匹配,比如STM32用3.3V,Arduino用5V,不要混接烧芯片。
- 5. 电流设置优先:
细分设置前,必须先调好A4988的VREF电流(限制电机最大电流,防止烧电机/驱动),再调细分。
- 6. 脉冲频率要求:
细分越高,控制器需要输出的脉冲频率越高,比如1/16步要比全步快16倍,控制器算力不够会丢步。
7.注:
每一个A4988上都有一个电位器,电位器和GND之间会有一个正向小电压,该电压会随着电位器转动而变化,一般来说限幅后的输出电流=此电压x2,为了避免电机发烫请合理调节电位器以防止电机过热,当然2倍也不完全准确,每一个分步模式下都会有比例,比如全部模式下电压x2x70%才约等于实际电流
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论