



ESP32迷你无人机
简介
基于ESP32开发板的迷你小飞机,采用MPU6500或MPU6050模块,4个AO3416电机芯片,4个8520电机。 可用QGC手机APP,或SBUS接收机+大遥控!元件极少!复刻100%成功!
简介:基于ESP32开发板的迷你小飞机,采用MPU6500或MPU6050模块,4个AO3416电机芯片,4个8520电机。 可用QGC手机APP,或SBUS接收机+大遥控!元件极少!复刻100%成功!开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
1、工程概述
ESP32迷你小飞机!迷你小四轴!
本项目主要元件只需1块ESP32开发板,1个MPU6500或MPU6050模块,1个ME6118A33PG稳压芯片,
4个AO3416电机芯片,4个8520空心杯电机,1块软包锂电池作为动力,以及少量电容电阻排针排母。
没有复杂的密集引脚芯片!只需一把电洛铁就能复刻成功!
欢迎在下方评论区留言探讨,Q群在下方评论区里!

2、手机APP遥控及大遥控
QGC手机APP,可在QGC官网https://qgroundcontrol.com/ 下载
烧录附件的bin固件,ESP32将发射名为Drone_WIFI的信号,密码12345678

先用手机WIFI管理器,连上小飞机ESP32发射的热点,然后打开QGC手机APP,
程序自动连接飞机;此时顶部状态栏显示应为绿色。
点击左上角的“Ready To Fly” 文字,然后点击 Armd(解锁)按钮,向右拉滑动条解锁飞机,小飞机就会起桨慢速旋转!轻轻拨动油门杆就可以起飞了!

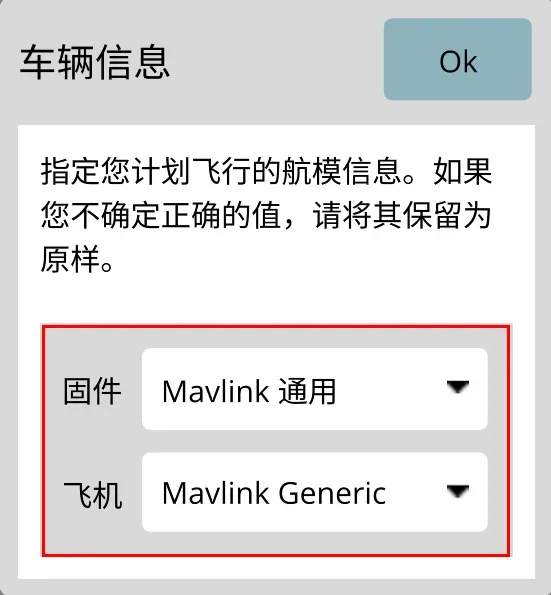
如果你的QGC安装后首次启动时,APP信息弹框(翻译为:车辆信息可能有误),固件可选:Mavlink通用,飞机选:Mavlink Generic
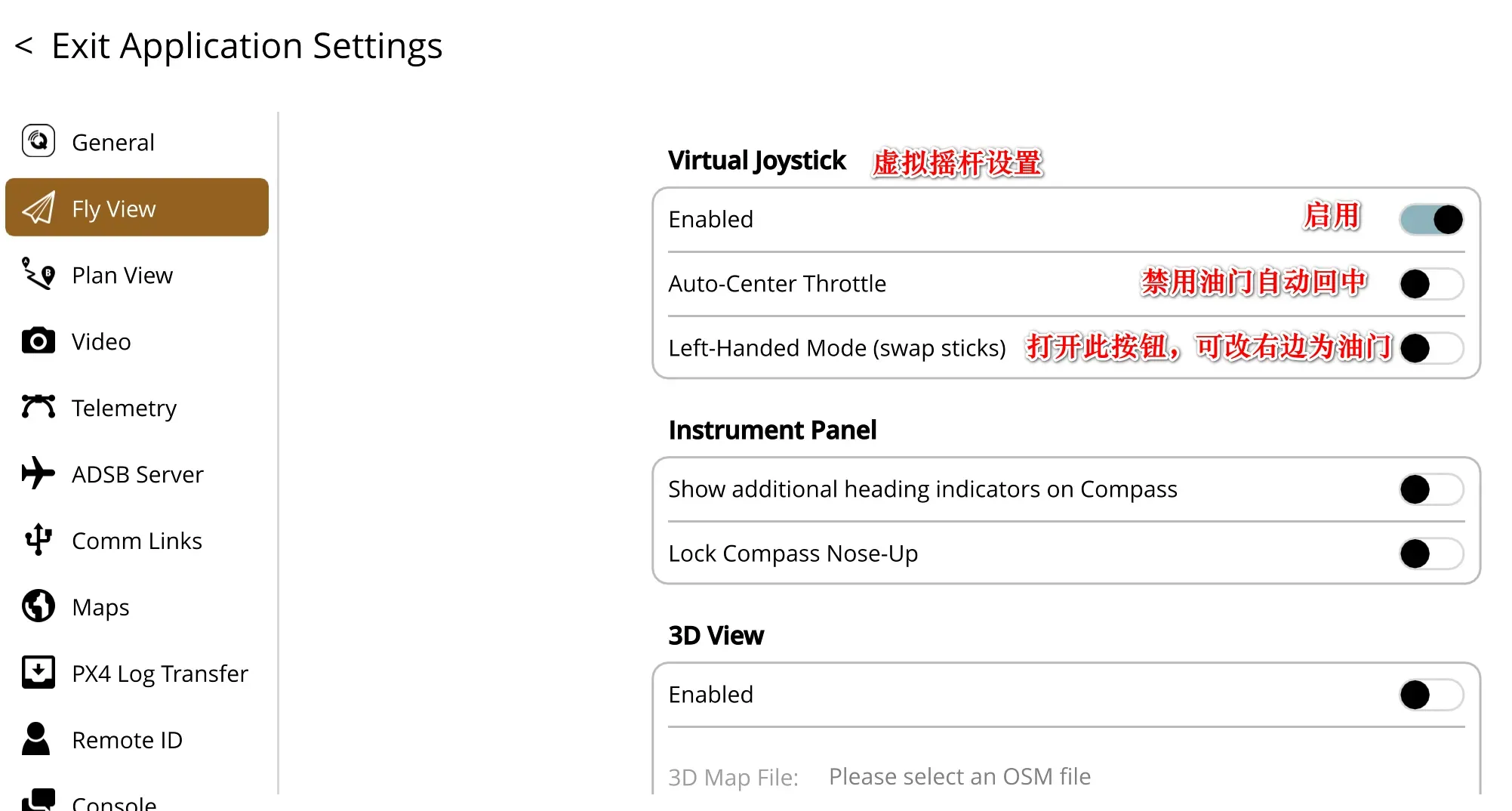
关于QGC APP虚拟摇杆的问题,反复有新人问到,请看截图说明,以后此问题不再回复!
当然,这款小飞机也支持SBUS接收机+大遥控!
执行cr校准后,就可以使用大遥控自由畅飞了,用过大遥控后,你就想抛弃QGC App,哈哈!大遥感手感和操控精度,体验远超APP的虚拟摇杆!
图示用的是乐迪R6DS或R6DSM接收机,及乐迪AT9S Pro遥控器。
接收机蓝紫色灯为SBUS/PPM模式。
另外,你也可以魔改支持ELRS接收机,请继续看下文及附件源代码。

大遥控,也可选择迈克MC6、MC7、MC8等价格相对便宜的遥控器接收机,或FS富斯i6X遥控器+IA6B接收机。
只要支持SBUS协议的遥控器+配套的接收机均可。
但你要跟客服确认接收机的VCC供电输入是否支持+3V供电?有些接收机最低电压要求4V以上的!
PCB板上预留的SBUS三针插口VCC脚是直连3.7V锂电池的。
(因为不好走线连+5V,而我用的R6DSM接收机支持3-6V,所以就近直连到主电池了)
当然你也可以从升压板+5V飞线给接收机供电。
如果会用嘉立创EDA的同学,也可以走改一下布线,把SBUS的VCC供电插针连到+5V,那就更完美了!
3、PCB设计
为降低制作难度,方便零基础,且缺少工具的朋友复刻,本项目采用的核心元件ESP32、MPU6500或MPU6050,以及排针排母,都是插件。
少量的贴片电容电阻,间隔也很宽,如果你没有热风机,我相信用尖头的电烙铁也能制作。
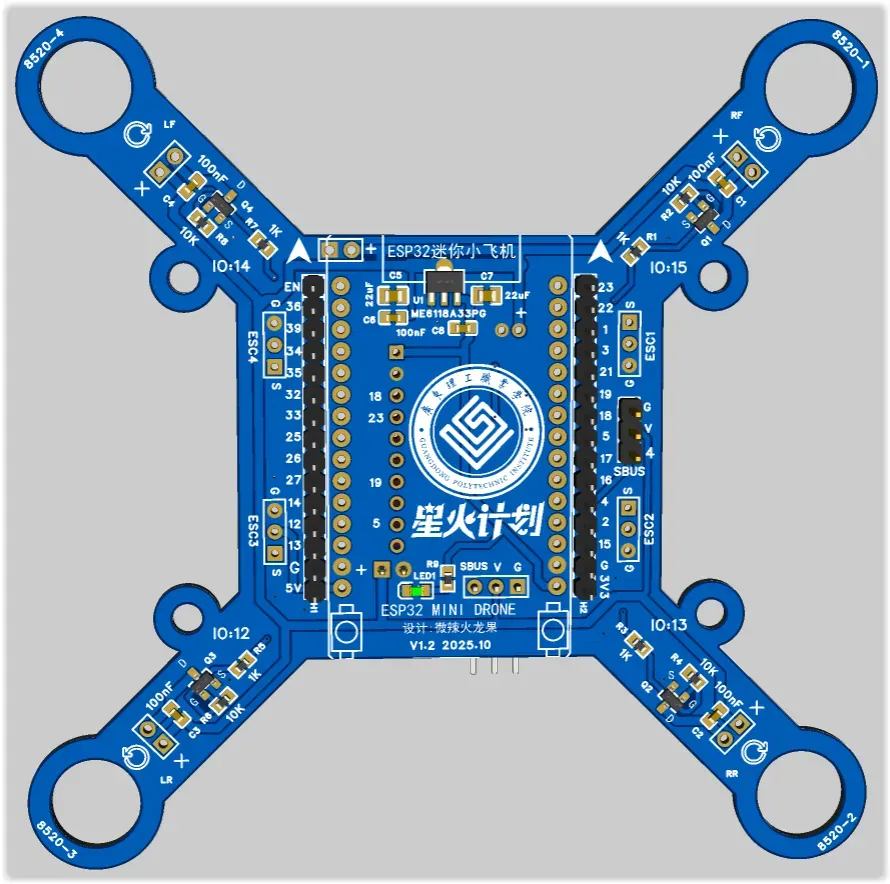
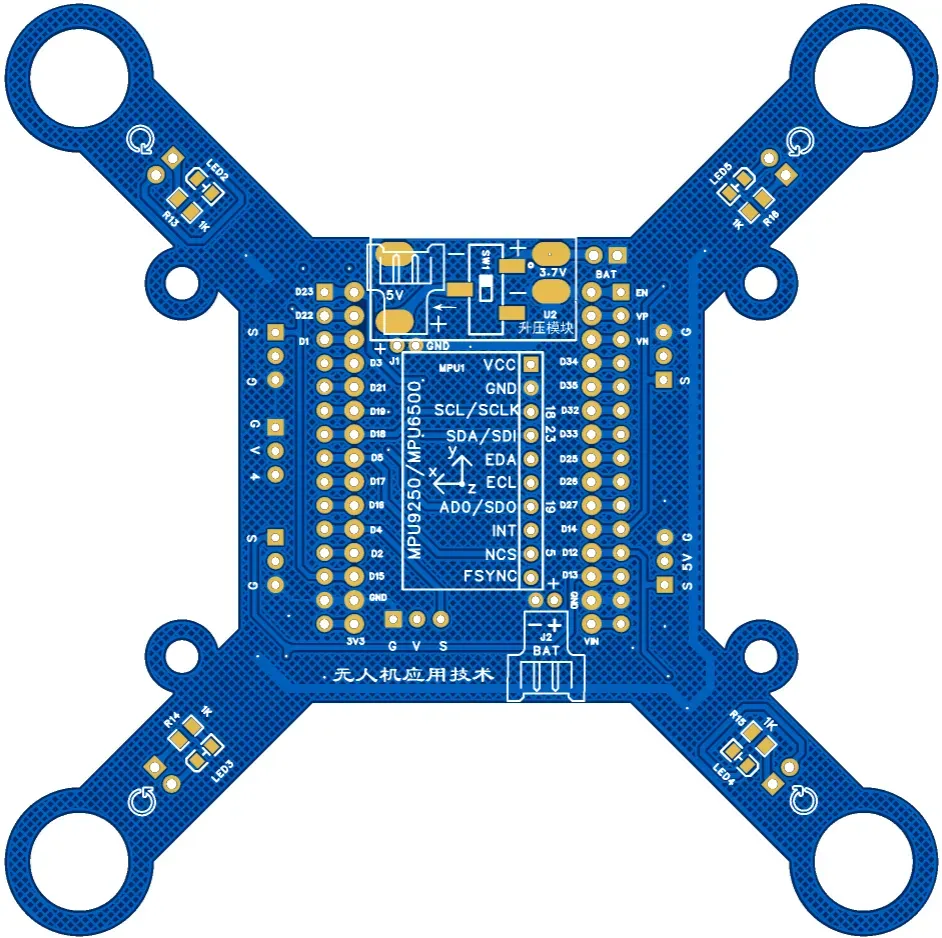
2025年10月28日开源V1.2版,PCB布局如下:

经过广大网友的复刻测试验证,在V1.2版基础上总结经验的基础上,
2025年11月25日更新V1.3版进行几处微调:
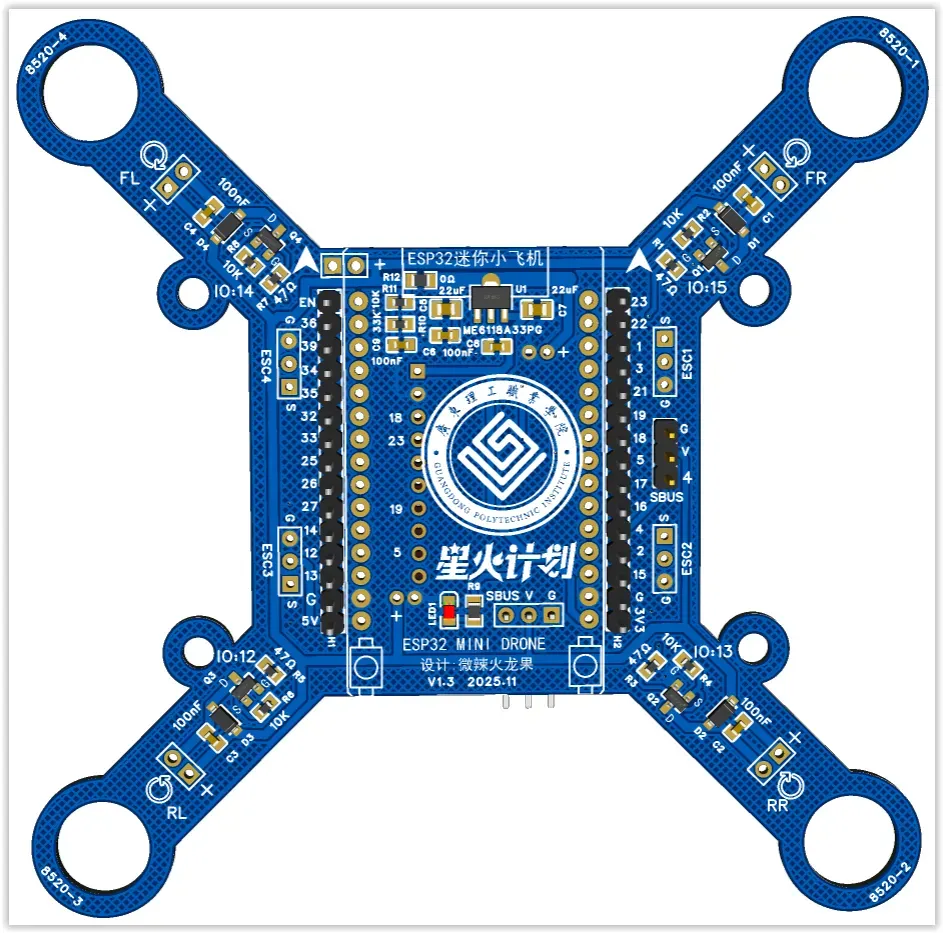
第1处,是把贴片元件全部放在顶面,方便一些朋友使用恒温焊台贴片;
第2处,是每个机臂8520电机的焊点两端加上了肖特基二极管,减少反向电动势击穿MOS管的风险;
第3处,是把每个AO3416的栅极电阻改为47Ω;
AO3416、SI2300A、AO3400和SI2302均属于低压大电流的MOSFET。根据其特性,栅极驱动电阻通常建议取10Ω~100Ω。
电阻值过小(如远小于10Ω)虽然能加快开关速度,但可能导致开关过程中产生较大的电压和电流震荡,增加EMI。
电阻值过大(如远大于100Ω)则会显著减慢开关速度,增加开关损耗。
在10Ω至100Ω的范围内,可以找到一个兼顾两者的折中点。
为了在开关速度和电磁干扰(EMI)抑制之间取得平衡,推荐栅极驱动电阻设置在10Ω至100Ω之间,因此我们取47Ω;
第4处,是在底面增加微型DC-DC升压模块的贴片焊盘,先将3.7V锂电池升压到5V,再通过ME6118A33PG稳压到3.3V,开发板功能更稳定。
有效减少一些老旧锂电池或低倍率电池在马达启动瞬间电压拉低导致开发板重启。
如果你使用高倍率低内阻高性能的电池,就可能不需要焊接底面的5V升压模块;
我们在正面增加一个0欧姆的R12电阻焊盘,你可以把R12电阻焊盘直接用铜导线直连!
总结这段话的意思是:
用5V升压模块时,0欧姆电阻焊盘断开!
不用5V模块时,0欧姆电阻焊盘直连!
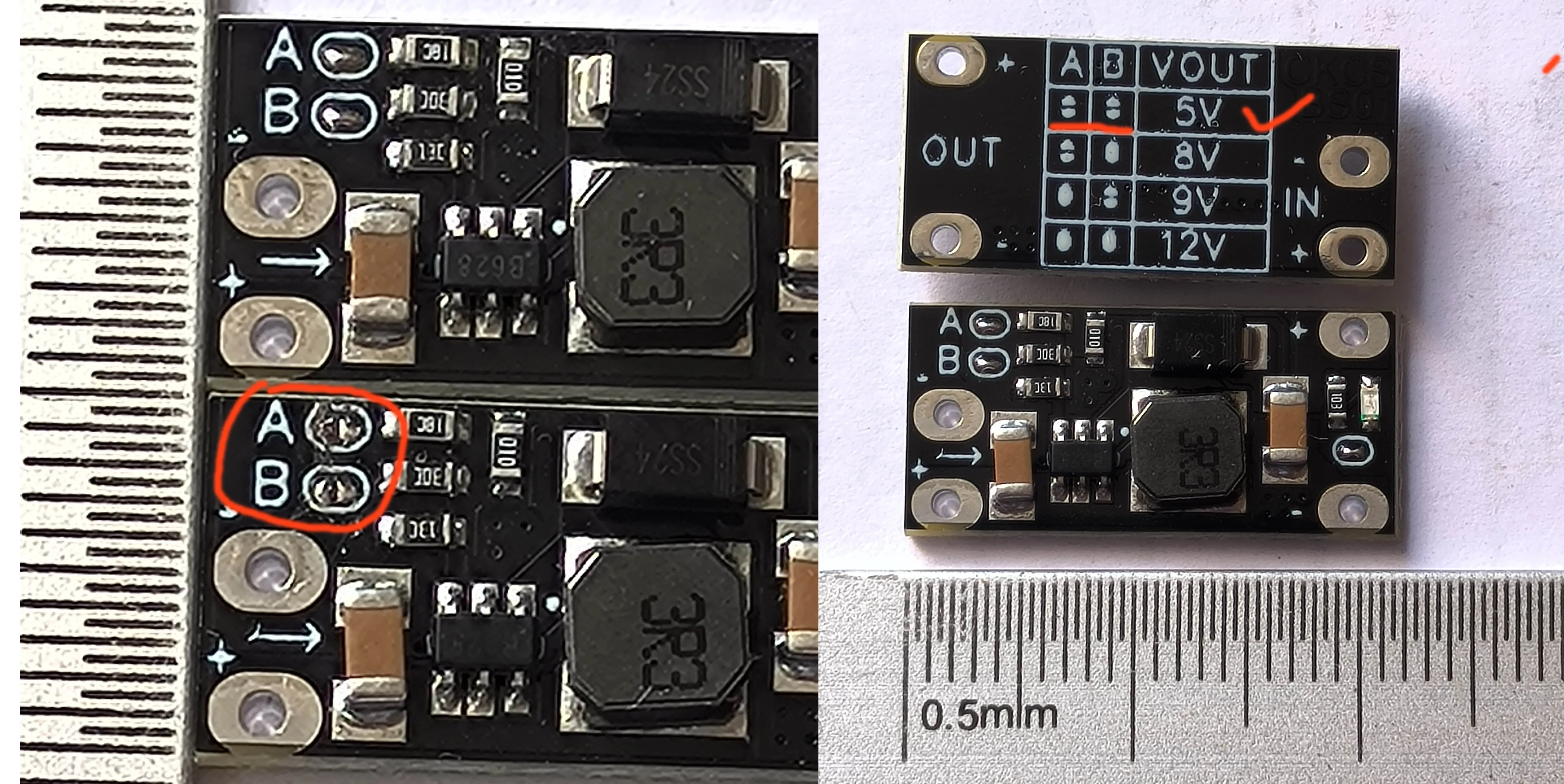
微型升压模块高清图,模块尺寸约22*11mm,模块默认输出12V,电流0.4A,
你需要用电烙铁把AB点的焊锡清理,让AB点断开,改为5V,1A输出。
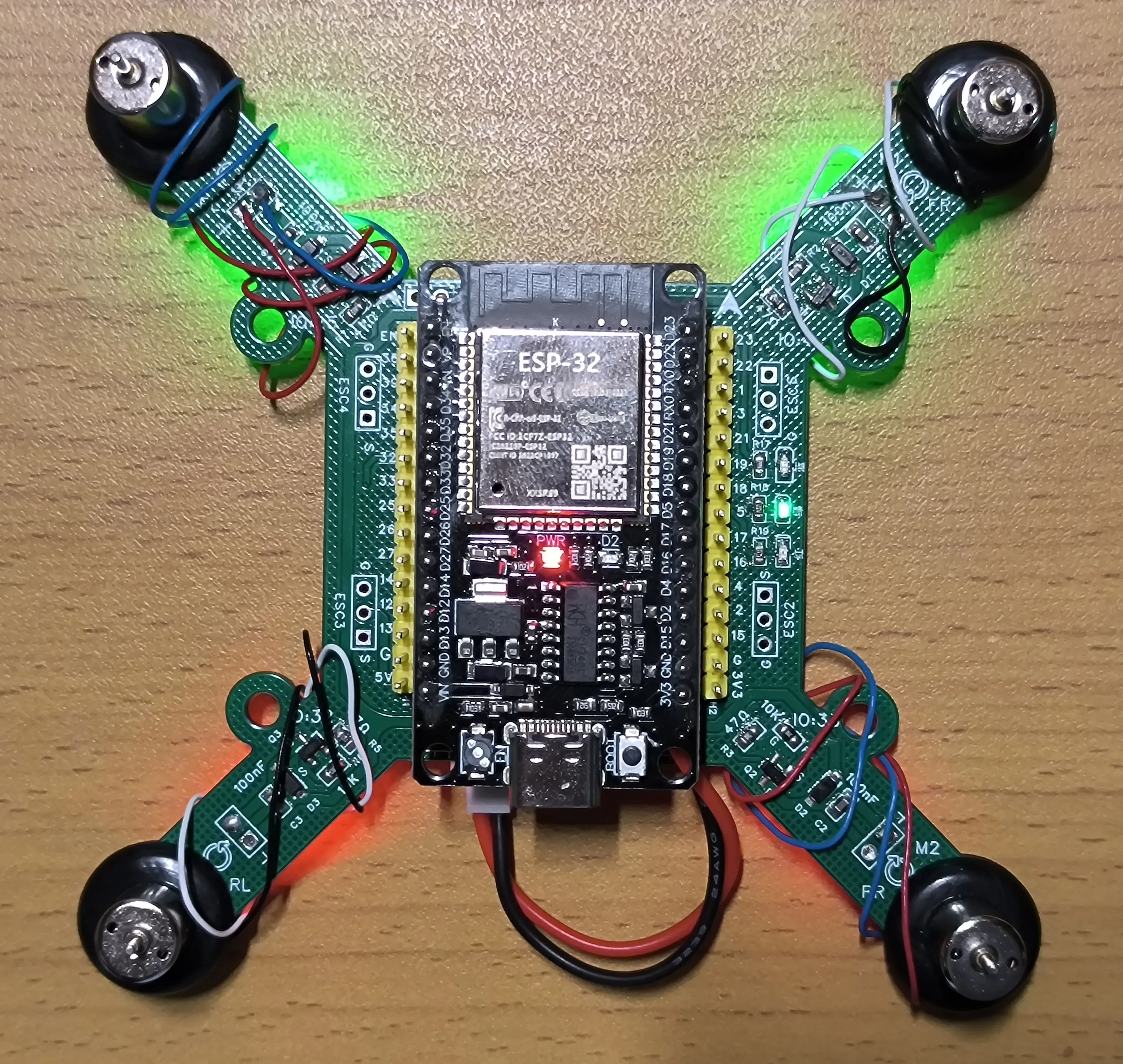
第5处,是有网友反馈,小飞机起飞后,分不清头尾,因此V1.3版,在机臂的下方增加了4颗LED灯。
焊接的时候,建议采用前后采用两组不同颜色,如图前边LED2、LED5焊接绿光LED,后边LED1、LED3、LED4焊接红光LED。
方便起飞后区分机头和机尾。
2025年12月6日更新V1.3.1版,增加拨动小开关:
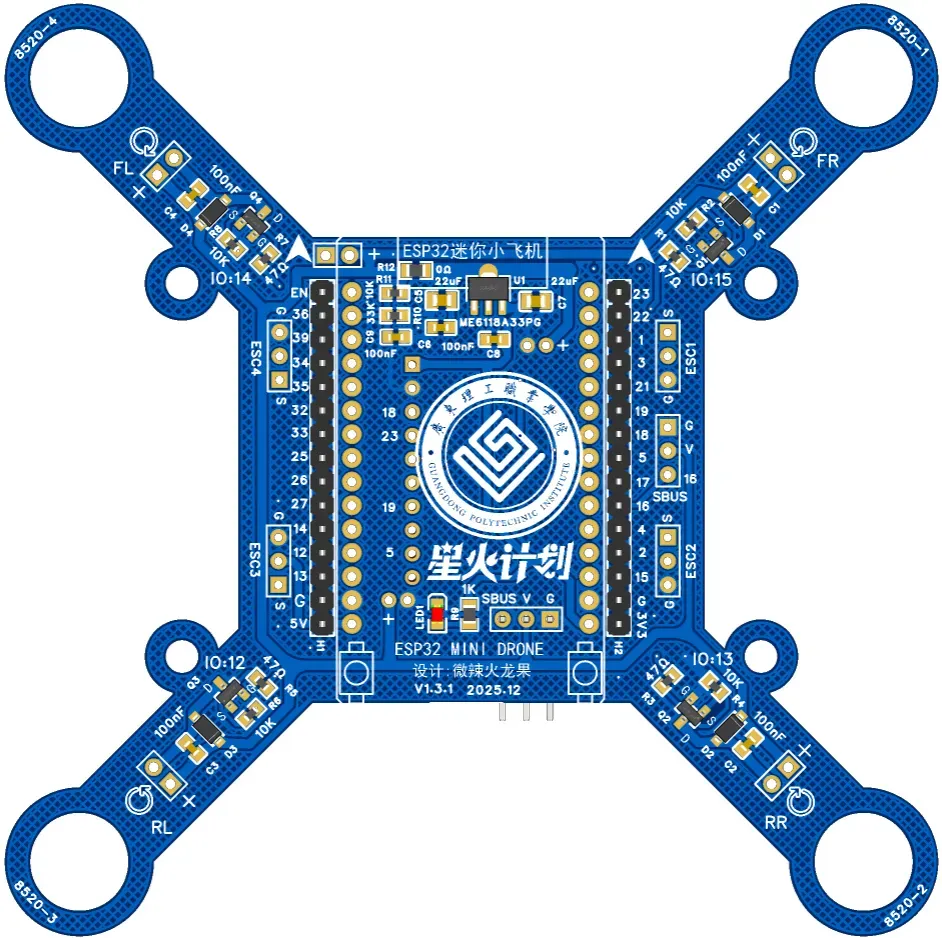
在V1.3版的基础上,底面增加了一个小开关,型号为:MSK-1134-3P-2H 三脚2档贴片拨开关,柄高2mm:

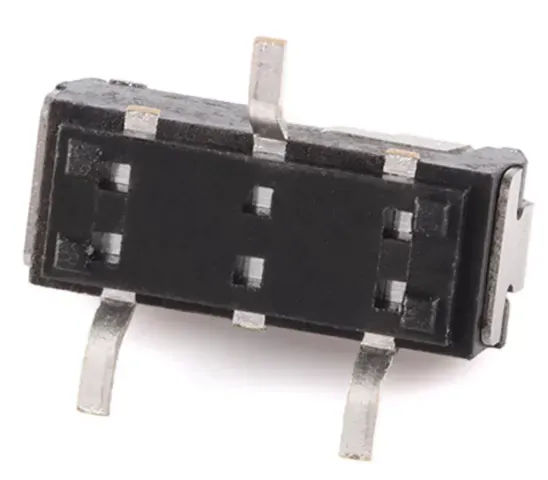
如果你不焊接5V升压模块,那么才能安装此开关。
注意的是,安装此开关后,那么顶层的0Ω电阻R12不需要焊接。
V1.3.1版的3脚2挡贴片开关是竖装的,不会阻挡J2电池母座,你可以任选J1或J2其中一个使用安装51005电池母座即可。
电池母座价格虽便宜,但是需要在其店单独另外购买,比较麻烦。
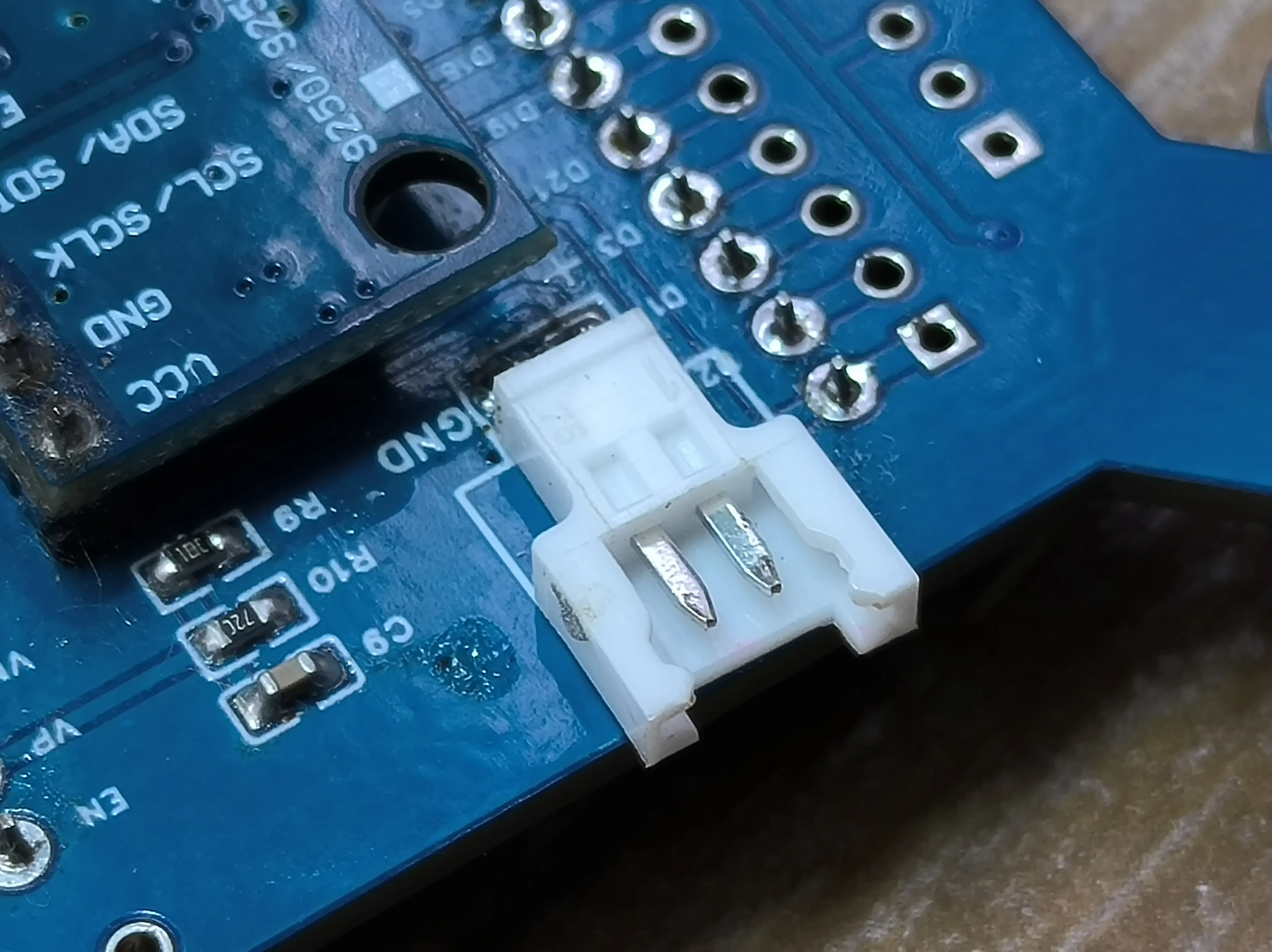
所以你也可以在购买电容电阻电池时,顺便买2条空对空白头电池母线,用母头接电池即可。


-----分割线---V1.4版PCB及后续版本,或许可以兼容ESP-Drone、ESP-FC等更多固件-----
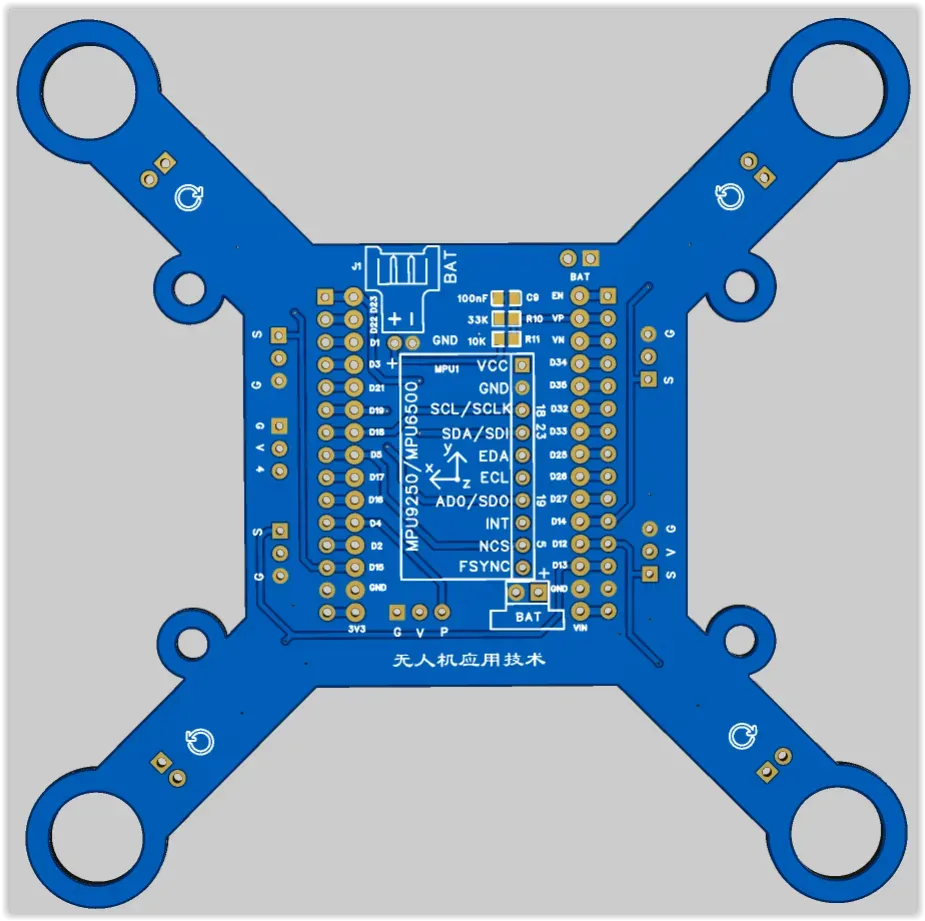
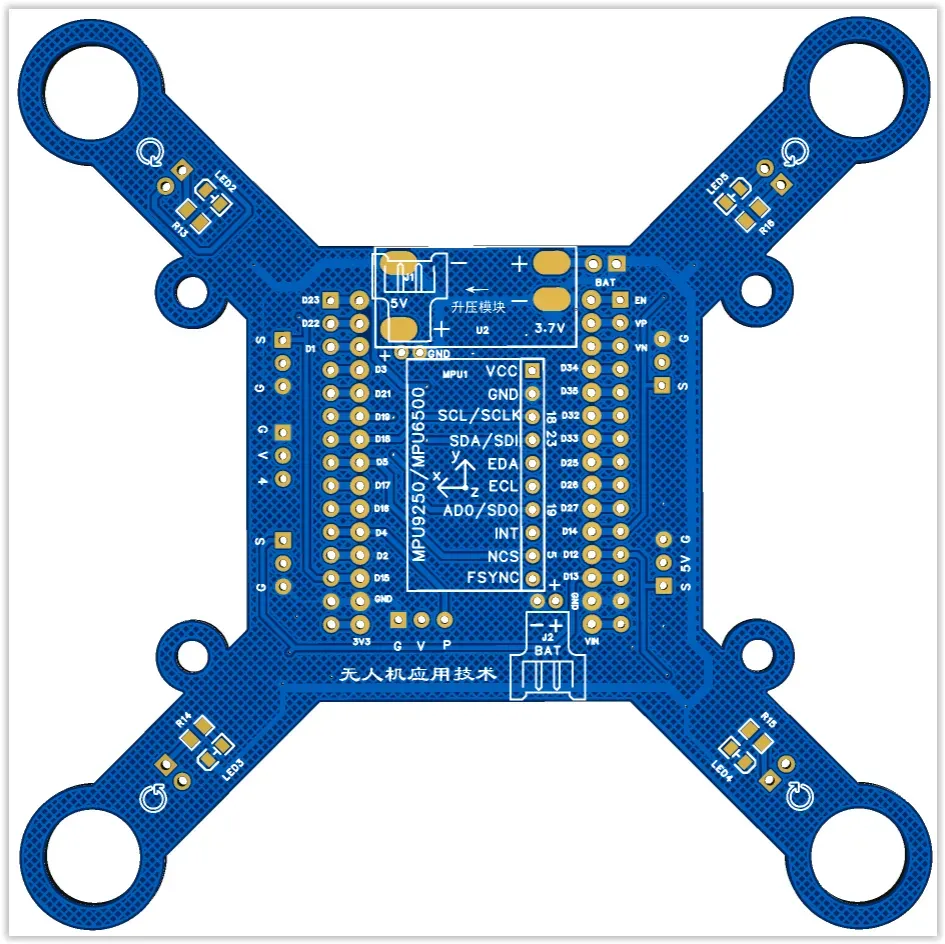
2026年3月25日更新V1.4版,你可选安装MPU6050或MPU6500模块!
通过巧妙的布线,同一款PCB,支持两种陀螺仪模块!
V1.4版PCB实物,顶视图
注意,如果安装MPU6500模块时,不可以焊接LED6红灯(GPIO5),LED7绿灯(GPIO18)。
因为GPIO23\19\18\5是SPI引脚,被MPU6500使用!
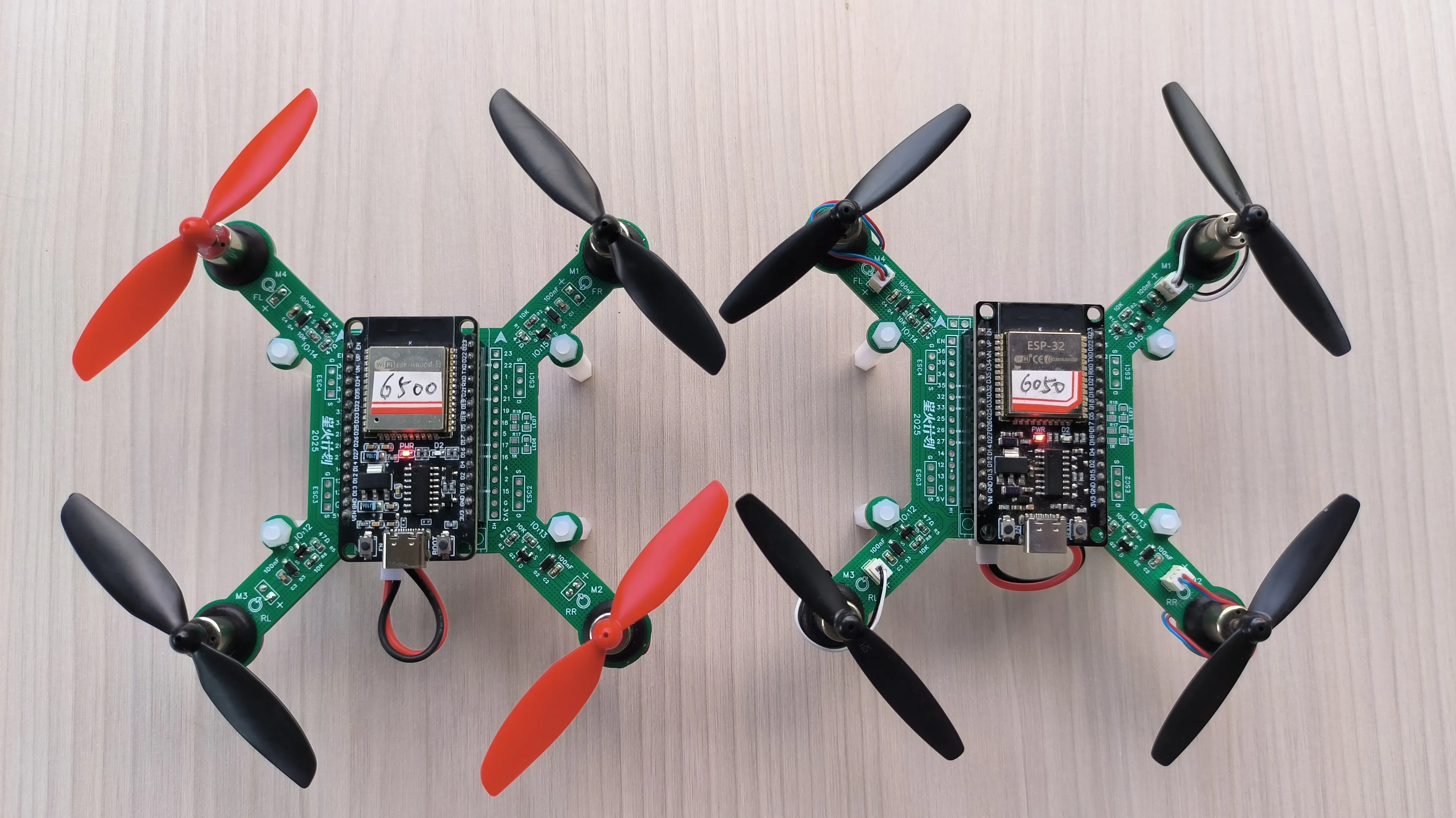
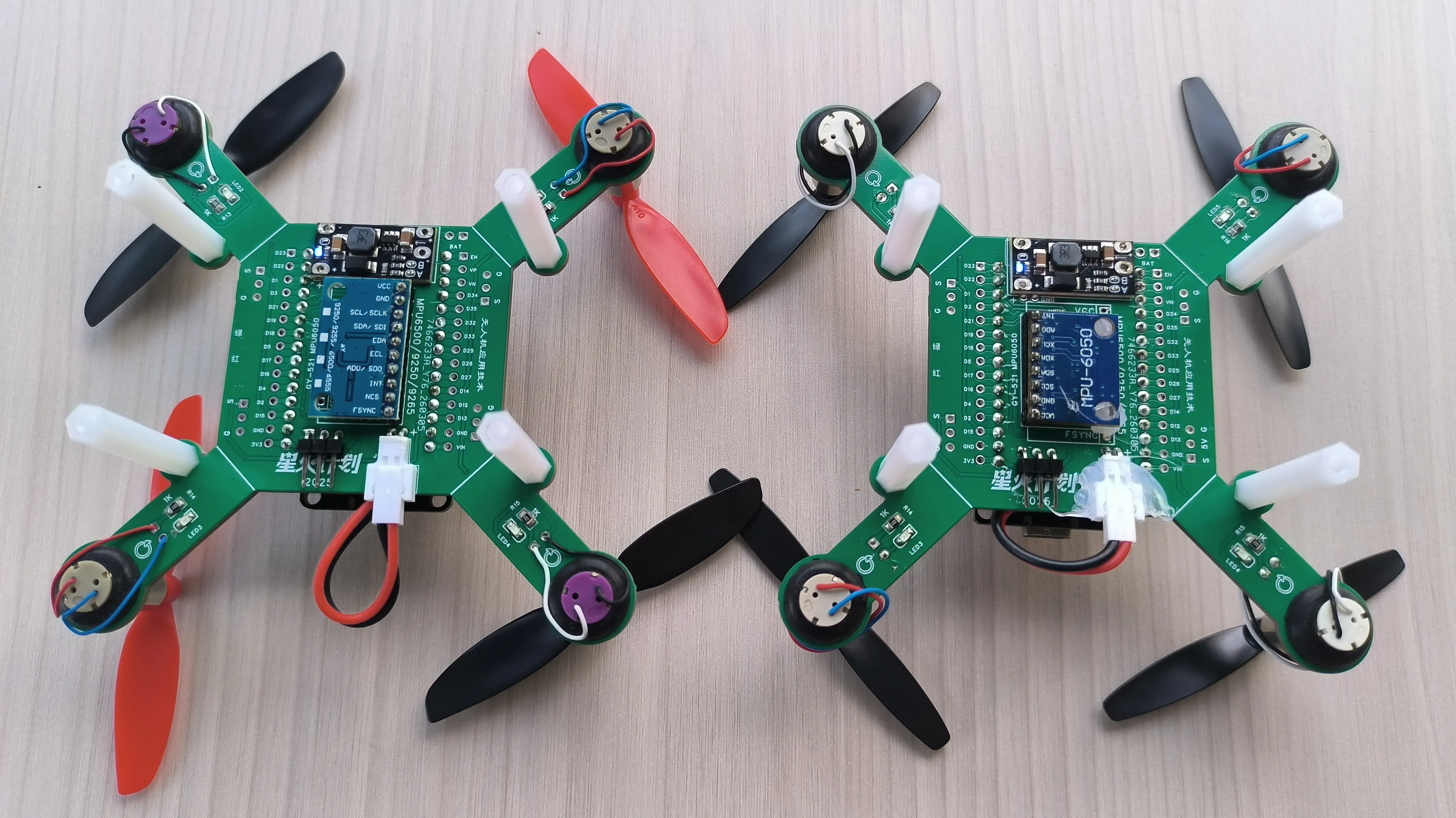
V1.4版PCB实物,底视图:
左边的样机安装MPU6500模块,右边的样机安装MPU6050模块。
如图样机还安装了4个单头的M3六角尼龙柱,并且用M3尼龙螺母固定。
尼龙柱和尼龙螺母,自己在电商平台上搜吧,长度可选20-30mm。
适配V1.4版PCB的bin固件,可在下方附件下载,可直接烧录。
固件基于Flix Releases V1.2 编译,源码下载网址为
https://github.com/okalachev/flix/releases/tag/v1.2
附件“ESP32迷你无人机bin固件20260325.rar”固件压缩包里,包括2个bin文件。
你可以根据安装陀螺仪模块,选择对应的bin固件进行烧录:
ESP32迷你无人机Flix1.2固件_MPU6050.bin,适配MPU6050模块。
ESP32迷你无人机Flix1.2固件_MPU6500.bin,适配MPU6500、MPU9250模块
你可以下载附件的“ESP32迷你无人机Flix-v1.2源代码20260325.rar”
我做了少量的中文注释和修改,你可以使用Arduino IDE直接编译上传烧录。
注意的是,要根据陀螺仪模块的型号,在"imu.ino" 代码文件里进行选择:
-------------------------------------------------------------------------------
//下面这两行,根据你安装的陀螺仪模块来决定!例如用MPU6500和MPU9250就打开对应的行!
//不能两行同时打开!!
MPU9250 imu(SPI); // For ICM-20948 这一行启用MPU6500和9250
//MPU6050 imu(Wire); // For MPU-6050 这一行启用MPU6050
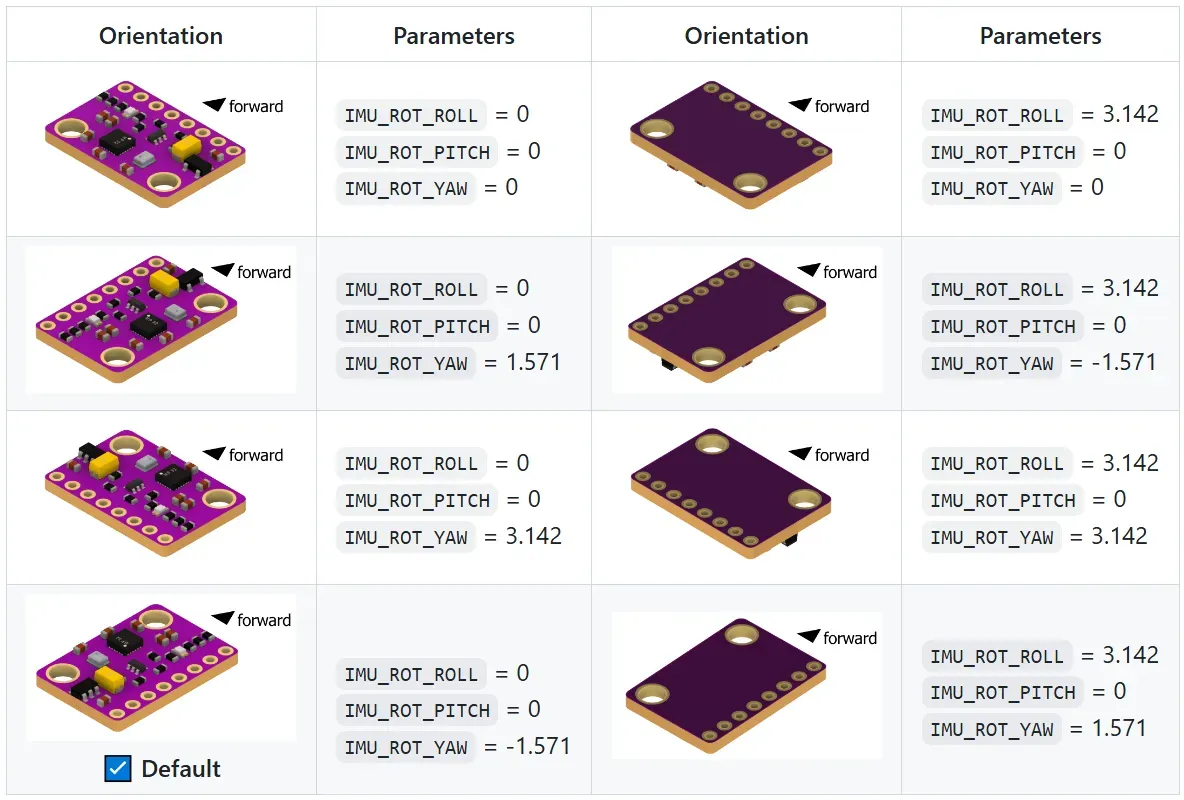
//下面这行是设置陀螺仪的安装方向,示意图请看嘉立创开源工程页面的插图,或查看Flix项目的Github仓库!
Vector imuRotation(0, 0, -PI / 2); // imu orientation as Euler angles
-------------------------------------------------------------------------------
剧透:后续计划基于V1.4版开源PCB及后续版本,适配乐鑫ESP-Drone开源无人机方案、及ESP-FC开源飞控!
欢迎持续关注~!
目前我们已基于ESP-IDF环境成功编译ESP-Drone源代码,适配“ESP32迷你无人机”V1.4版PCB+MPU6050模块,已经可以起桨和使用APP遥控,但仍需进一步测试。
编译ESP-Drone其实非常简单,首先安装好ESP-IDF环境,使用idf.py menuconfig命令,修改一下引脚定义(特别是控制马达信号的引脚),然后编译烧录到ESP32开发板上,即可使用esp-drone手机APP进行遥控和测试。
详细的说明,可参考下面乐鑫官方的在线文档。感兴趣的朋友,也可以研究和学习一下乐鑫开源的这款无人机。
我们测试和制作esp-drone固件的相关视频或魔改进展,也会及时在B站账号(微辣火龙果)上发布。欢迎一键三连关注!
QQ讨论群号在下方评论区可找到。
ESP-Drone 是基于乐鑫 ESP32/ESP32-S2/ESP32-S3 开发的小型无人机解决方案,可使用手机 APP 或游戏手柄通过 Wi-Fi 网络进行连接和控制。
该方案硬件结构简单,代码架构清晰,支持功能扩展,可用于 STEAM 教育等领域。项目部分代码来自 Crazyflie 开源工程,继承 GPL3.0 开源协议。
https://espressif-docs.readthedocs-hosted.com/projects/espressif-esp-drone/zh-cn/latest/gettingstarted.html
4、代码编译及固件烧录
本项目参考和使用Arduino社区okalachev用户开源的Flix项目,进行原理图、PCB设计和代码编译。
https://projecthub.arduino.cc/okalachev
Flix项目,是一套优秀的基于Arduino IDE+ESP32开发的飞控代码,
当前总代码量仅1800行,采用模块化设计、代码逻辑结构清晰、阅读简单易懂、魔改和拓展非常方便,
尽力给大家推荐学习这套代码!可以借助国产DeepSeek、Kimi、豆包等各种AI工具的编码能力,对源代码进行魔改升级。
比如增加气压计、光流计、超声波等拓展,应该都是可行的。
原设计样机采用的是ESP32 D1 Mini开发板,3D打印机架,使用导线进行各种元件和MOS管连线,制作比较麻烦。
Flix开源项目收集和精选了很多优秀的复刻案例,有兴趣的网友,可参考以下网址借鉴复刻,
https://github.com/okalachev/flix/blob/master/docs/user.md
我们的Q群里也有很多网友在研究复刻这些优秀的案例,欢迎你参与讨论!
比如:
(1)使用ESPNOW进行遥控的无人机,作者:KiraFlux.
Modified Flix firmware: https://github.com/KiraFlux/flix/tree/klyax
Remote control project: https://github.com/KiraFlux/ESP32-DJC
Drone design: https://github.com/KiraFlux/Klyax
(2)使用ESP32-S3-CAM板并搭载摄像头的无人机,可实现Wi-Fi视频流传输,作者: tolyan4krut.
项目地址 https://github.com/CatRey/Flix-Camera-Streaming
(3)使用无刷电机的无人机,作者:chkroko.
SpeedyBee BLS 35A Mini V2电调、ESP32-S3板、EMAX ECO 2 2207 1700kv电机、ICM20948V2惯性测量单元(IMU)、INA226功率监测器以及用于控制的蓝牙游戏手柄。
项目地址 https://github.com/Krokodilushka/flix/commit/568345a45ca7ed5b458a11a9d0a9f4c8a91e70ac
(4)使用ESP32-C3开发板的无人机,作者:chkroko.
使用ESP32-C3 SuperMini、BMP580气压计、INA226功率监测器、IRLZ44N MOSFETs
项目地址 https://github.com/Krokodilushka/flix/tree/dev
-----------------------------------------------------------------------------------
本项目开源的ESP32迷你无人机,固件烧录有两种方法:
第1种,可下载Flix源代码进行魔改和编译。
大家可自行下载和配置环境:
https://www.arduino.cc/en/software
https://github.com/espressif/arduino-esp32
如果你愿意从代码开始折腾或者基于我们开源的PCB进行魔改,欢迎加Q群探讨,群号放在评论区。
20260325更新,特别录制了关于编译环境安装配置及代码讲解 视频,链接在文末!
******************************************************
编译环境可用Arduino IDE,或VScode+platformio。
使用Arduino IDE编译上传代码,需要正确配置Arduino IDE for ESP32开发环境(网上很多教程),编译过程如果提示缺少库文件,那就按提示在线安装Flix源代码所需的库。
主要库文件包括:MAVLink、flixperiph等。
在Arduino IDE 左侧的开发板管理、库管理界面,搜索esp32 by Espressif Systems、MAVLink、FlixPeriph,在线直接安装即可!
附件提供“ESP32迷你无人机20251226bin固件”,我编译环境使用的是Arduino IDE 2.3.7+ESP32核心库3.3.5(即esp32 by Espressif Systems)。
两者在2025年12月26日当天的最新版。
// 大家尽量使用最新版本,一般都没问题!
// 源代码使用Arduino IDE 2.3.x以上版本编译,不支持老版本的1.8.19!
// 必须安装ESP32开发板核心库(即esp32 by Espressif Systems)版本3.1以上!
// 必须安装MAVLINK,FlixPeriph库文件!
// 开发板可选择ESP32 Dev Module或WeMOS D1 MINI ESP32;
你可以下载附件的“ESP32迷你无人机20251226源代码.rar”自行编译!
******************************************************
如果你重新设计或修改PCB,需特别关注的2个地方:特别是motors.ino和imu.ino两个代码文件!
******************************************************
另外附件还上传了:据说零编程经验的网友“刘振生”同学魔改的2个版本的源代码,供你参考!
A.其中支持ELRS接收机、控制LED灯_回传电压等扩展功能。
ESP32迷你小飞机源代码_刘振生修改版_增加elrs协议_控制LED灯_回传电压.rar
B.增加了气压定高,以及可使用手机Web浏览器作为遥控器,内含源代码及可直刷的固件!
ESP32迷你小飞机源代码_刘振生魔改_气压定高版_手机Web浏览器遥控.rar
手机浏览器输入http://192.168.4.1:8080即可操控无人机! 如图,手机浏览器全屏操控!

******************************************************
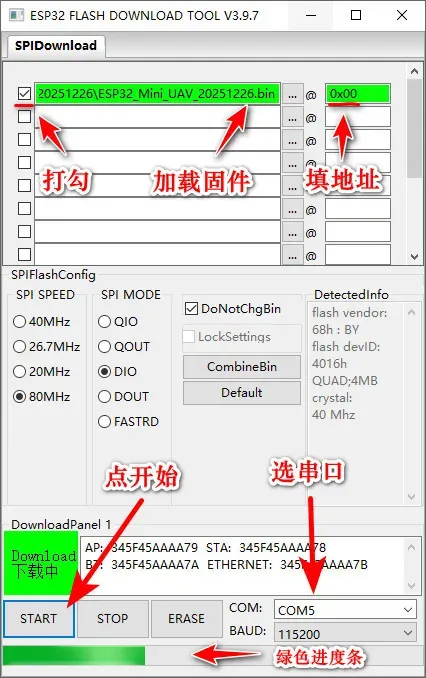
第2种,使用乐鑫官方flash_download_tool烧录工具,直接使用编译好的bin文件。
乐鑫Flash 下载工具用户指南,官方页面:
烧录方法:电脑先安装CH340串口驱动才能烧录(我买的ESP32开发板使用的CH340串口芯片,你如果买的是CP2102,CH9102,也需要安装相应的驱动)。
如下图所示,加载bin文件,地址填0x0,选择正确的COM口,其他默认,然后点Start,等下方绿色的进度条跑完,即可。
小白同学,认真看下面这张图,标题必须是ESP32,红色的地方必须打勾!必须输入0x0,
5、系统初始化
代码固件烧录后,小飞机暂还不能稳定的飞行,必须进行校准陀螺仪加速度;如果外接Sbus接收机,还需校准RC遥控。
如下图所示,你可以使用任意串口监视器进行校准,建议使用Arduino IDE自带的串口监视器,波特率选择115200.
也可以使用QGC地面站的Mavlink控制台通过WIFI连接飞控调参!
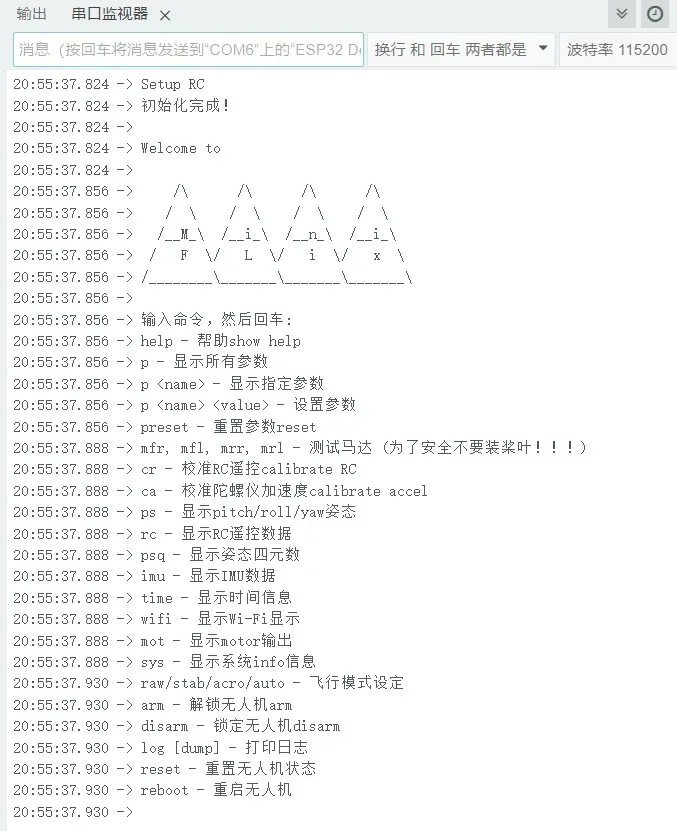
按一下ESP32开发板的左侧的EN按钮,稍等片刻,串口将出现以上界面。
你可以按提示,在串口信息框输入命令,查看各种信息,包括测试马达。
比如
输入mfr指令,右前的马达会旋转;输入mfl指令,左前的马达会旋转。
输入mrr指令,右后的马达会旋转 输入mrl指令,左后的马达会旋转。
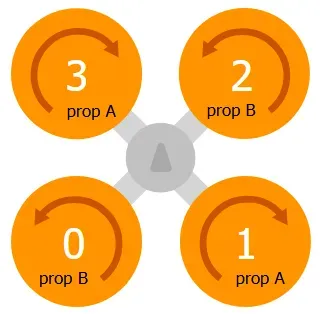
注意务必测试检查4个马达的旋转方向,必须与丝印上的旋转标注一致!
并且桨叶的必须向下吹风!无人机才能起飞!关于旋转方向及AB桨叶的安装,可参考下图:
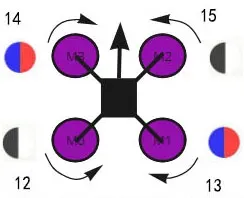
如图所示,14,15,12,13是ESP32的GPIO引脚号!
如果你是按物料清单,购买了两种引线颜色的马达,
那么左上右下用红蓝线的8520电机;左下右上用黑白线8520电机。
并且务必注意,红色和白色的引线,焊接在PCB板马达接线焊点的+号(正极)。
----------------------------------------------------------------------------
输入ca指令,校准陀螺仪加速度计,一共6步,每个步骤需保持8秒:
校准加速计Calibrating accelerometer;
1/6 水平放置[8 sec]将飞行器机头朝前(正常飞行方向),底部朝下水平放置在平坦表面,确保完全水平无倾斜;
2/6 机头朝上[8 sec]保持机头朝前,将飞行器前端抬起约90°,使机头指向天空,尾部接触支撑面;
3/6 机头朝下[8 sec]机头朝前,将飞行器前端下压约90°,使机头指向地面,尾部朝上;
4/6 右侧朝下[8 sec]机头朝前,将飞行器整体向右侧倾斜,直至右侧机臂垂直向下,左侧机臂朝上,机身呈90°侧倾;
5/6 左侧朝下[8 sec]与右侧相反,机头朝前时左侧机臂垂直向下,右侧朝上,保持机身稳定无晃动;
6/6 倒置放置[8 sec]将飞行器完全翻转,顶部朝下、底部朝上,机头方向保持不变,整体呈水平倒置状态;
✓校准完成Calibration done!;
以上cr校准完成后,把机头朝前摆正,然后串口指令框输入ps命令,
查看3个姿态角应比较小,数字应在-3至+3之间:
roll: 1.521120 pitch: -1.062948 yaw: 0.711197
----------------------------------------------------------------------------
输入cr指令,校准RC遥控器(没有大遥控的朋友,这一步可以不操作),
如果你刷的是附件提供的20250805固件,校准遥控器一共9步;
附件提供20251226bin固件及代码,是8步,内容类似。
按串口提示,拨动摇杆进行校准,每个步骤需保持3秒:
1/9 校准遥控,所有摇杆归中位置[3秒];
2/9 左摇杆:向下,右摇杆:居中[3秒];
3/9 左摇杆:居中,右摇杆:居中[3秒];
4/9油门通道识别,左摇杆:向上推到底(油门最大),右摇杆:居中[3秒];
5/9 偏航通道识别,左摇杆:向右推到底(偏航右转)右摇杆:居中[3秒];
6/9 俯仰通道识别,左摇杆:向下推到底,右摇杆:向上推到底(俯仰前进)[3秒];
7/9 横滚通道识别,左摇杆:向下推到底,右摇杆:向右推到底(横滚右转)[3秒];
8/9 解锁通道识别,找到你准备用作解锁的开关,拨到解锁位置并保持3秒[3秒];
9/9 模式通道识别,先将解锁开关拨回锁定位置,然后将模式开关拨到最高档位(如手动模式)[3秒];
以上cr校准完成后,在串口指令框输入p命令,
查看遥控器通道是否正确,找到最底下类似消息:
22:02:07.842 -> RC_ROLL = 0
22:02:07.842 -> RC_PITCH = 1
22:02:07.842 -> RC_THROTTLE = 2
22:02:07.842 -> RC_YAW = 3
22:02:07.842 -> RC_ARMED = 9
22:02:07.842 -> RC_MODE = 4
通道映射正确。
横滚为0,俯仰为1,油门为2,航向为3,解锁为9,模式开关为4。
我视频里用的是乐迪AT9S Pro遥控器,R6DS或R6DSM接收机。
这是美国手的设置,左边摇杆是油门和方向,右边摇杆是横滚和俯仰
如果通道识别有误,你可以重新校准或者使用命令直接绑定,
比如串口输入指令p RC_THROTTLE 2 (绑定2通道为油门,注意中间的空格)
串口输入指令p RC_YAW 3(绑定3通道为航向,注意中间的空格)
6、关于参数调整
串口对话框,输入p指令,看到如下类似参数(因为代码不断迭代更新,不同版本略有不同):
这是我制作的样机,接上乐迪AT9S Pro遥控器+R6DSM接收机,经cr和ca校准后的参数,
你可以对比参考,设置这些参数试试。其中RC开头是跟大遥控器和接收机相关,包括各通道的RC_ZERO零值和RC_MAX最大值。
因每个人使用的遥控器不一样,以下关于RC_ZERO和和RC_MAX的数字,是不唯一,仅供参考。
21:44:25.916 ->
21:44:27.382 -> CTL_R_RATE_P = 0.05
21:44:27.382 -> CTL_R_RATE_I = 0.2
21:44:27.414 -> CTL_R_RATE_D = 0.001
21:44:27.414 -> CTL_R_RATE_WU = 0.3
21:44:27.414 -> CTL_P_RATE_P = 0.05
21:44:27.414 -> CTL_P_RATE_I = 0.2
21:44:27.414 -> CTL_P_RATE_D = 0.001
21:44:27.414 -> CTL_P_RATE_WU = 0.3
21:44:27.414 -> CTL_Y_RATE_P = 0.3
21:44:27.414 -> CTL_Y_RATE_I = 0
21:44:27.414 -> CTL_Y_RATE_D = 0
21:44:27.414 -> CTL_R_P = 6
21:44:27.414 -> CTL_R_I = 0
21:44:27.414 -> CTL_R_D = 0
21:44:27.414 -> CTL_P_P = 6
21:44:27.414 -> CTL_P_I = 0
21:44:27.414 -> CTL_P_D = 0
21:44:27.414 -> CTL_Y_P = 3
21:44:27.414 -> CTL_P_RATE_MAX = 6.28319
21:44:27.414 -> CTL_R_RATE_MAX = 6.28319
21:44:27.414 -> CTL_Y_RATE_MAX = 5.23599
21:44:27.414 -> CTL_TILT_MAX = 0.523599
21:44:27.414 -> IMU_ACC_BIAS_X = 0.315588
21:44:27.446 -> IMU_ACC_BIAS_Y = 0.113106
21:44:27.446 -> IMU_ACC_BIAS_Z = 0.201834
21:44:27.446 -> IMU_ACC_SCALE_X = 1.00074
21:44:27.446 -> IMU_ACC_SCALE_Y = 0.999245
21:44:27.446 -> IMU_ACC_SCALE_Z = 1.01109
21:44:27.446 -> EST_ACC_WEIGHT = 0.003
21:44:27.446 -> EST_RATES_LPF_A = 0.2
21:44:27.446 -> RC_ZERO_0 = 1002
21:44:27.446 -> RC_ZERO_1 = 1012
21:44:27.446 -> RC_ZERO_2 = 200
21:44:27.446 -> RC_ZERO_3 = 1001
21:44:27.446 -> RC_ZERO_4 = 1800
21:44:27.446 -> RC_ZERO_5 = 0
21:44:27.446 -> RC_ZERO_6 = 0
21:44:27.446 -> RC_ZERO_7 = 0
21:44:27.446 -> RC_MAX_0 = 1793
21:44:27.446 -> RC_MAX_1 = 214
21:44:27.446 -> RC_MAX_2 = 1793
21:44:27.489 -> RC_MAX_3 = 1800
21:44:27.489 -> RC_MAX_4 = 200
21:44:27.489 -> RC_MAX_5 = 0
21:44:27.489 -> RC_MAX_6 = 0
21:44:27.489 -> RC_MAX_7 = 0
21:44:27.489 -> RC_ROLL = 0
21:44:27.489 -> RC_PITCH = 1
21:44:27.489 -> RC_THROTTLE = 2
21:44:27.489 -> RC_YAW = 3
21:44:27.489 -> RC_MODE = 4
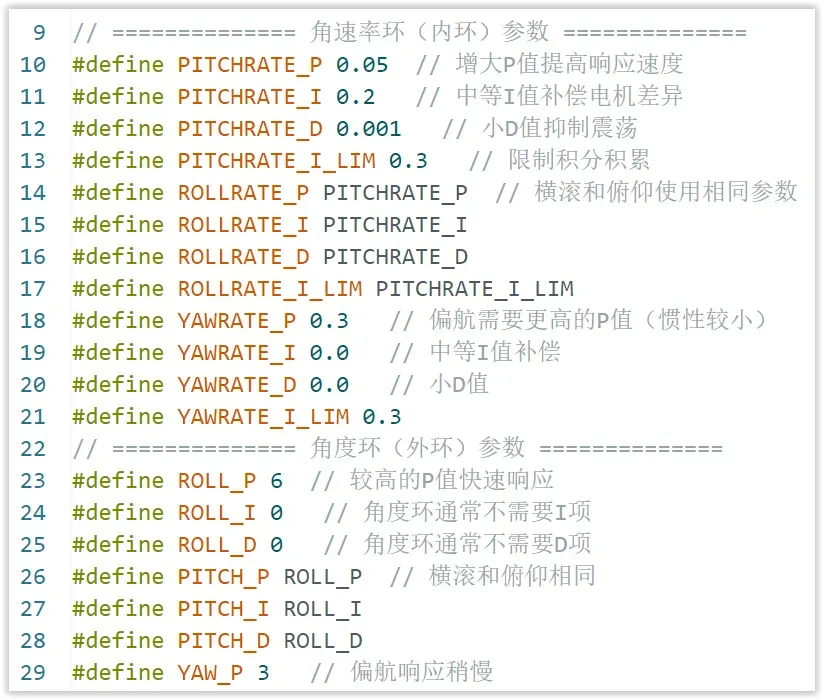
据网友实测调试,以下微调后的PID参数,飞行更加稳定,供你参考:
ROLLRATE_P = 0.06
ROLLRATE_I = 0.2
ROLLRATE_D = 0.002
ROLLRATE_I_LIM = 0.35
PITCHRATE_P = 0.05
PITCHRATE_I = 0.2
PITCHRATE_D = 0.001
PITCHRATE_I_LIM = 0.35
YAWRATE_P = 0.4
YAWRATE_I = 0.01
YAWRATE_D = 0.01
ROLL_P = 7
ROLL_I = 0
ROLL_D = 0
PITCH_P = 7
PITCH_I = 0
PITCH_D = 0
YAW_P = 3
关于PID参数,涉及到的源代码,主要是control.ino代码文件,
以下是关于PID参数默认参数的代码注释,你可以参考进行调整。
7、元件物料
本项目,主要的物料包括锂电池、ESP32开发板、MPU6500模块、8520空心杯电机。
其他元件都比较便宜,但有些最小购买量的约束,购齐全部物料成本约60-65元。
| ID | 位号 | 型号 | 封装 | 单价 | 单片用量 | 单位 |
| 1 | 3.7V锂电池(注意必须是航模锂电池) | 尺寸802035或902240、802045 | 买1块送充电线 | 16.98 | 1 | 片 |
| 2 | 51005空对空电池连接线母头(可选) | 如果不买电池母座,可买母线 | 空对空母线 | 0.5 | 1 | 条 |
| 3 | BOARD1 ESP32开发板,30针 | ESP32开发板30pin,CH340C | ESP32-DEVKITV1 | 14.5 | 1 | 片 |
| 4 | MPU1 | MPU6500陀螺仪三轴姿态传感器 | MPU6500模块 | 3.05 | 1 | 片 |
| 5 | 有刷电机(红蓝线)不同颜色,方便区分 | 8520空心杯电机,轴径1.2mm | 红蓝线 | 1.9 | 2 | 个 |
| 6 | 有刷电机(黑白线)不同颜色,方便区分 | 8520空心杯电机,轴径1.2mm | 黑白线 | 1.9 | 2 | 个 |
| 7 | 75mm桨叶(容易打烂损毁,多买一些!) | 75mm,孔径1.2mm | 75mm桨叶1对 | 0.97 | 2 | 对 |
| 8 | H2,H1(多买几个) | HDR-M_2.54_1x15P母座 | 插件 | 0.17 | 2 | 个 |
| 9 | U1(多买几个,备用) | ME6118A33PG | SOT-89-3 | 0.26 | 1 | 只 |
| 10 | Q4,Q1,Q3,Q2(多买几个,易烧毁可换!) | AO3416或SI2300A,电流6A | SOT-23 | 0.16 | 4 | 只 |
| 11 | R1,R3,R5,R7,贴片电阻47Ω | 0603贴片电47欧,精度±1% | R0603 | 0.88 | 4 | 只 |
| 12 | R9(LED的限流电阻,随便用1K-10K) | 1K 贴片电阻 | R0603 | 0.8 | 1 | 只 |
| 13 | R2,R4,R6,R8,R11 | 10K 贴片电阻 精度1% | R0603 | 0.8 | 5 | 只 |
| 14 | R10 | 33kΩ贴片电阻 精度1% | R0603 | 0.8 | 1 | 只 |
| 15 | C9,C4,C1,C2,C6,C8,C3 | 100nF | C0603 | 1.65 | 7 | 只 |
| 16 | C5,C7 | 22uF ±20% 25V 贴片电容 | 0805 | 0.11 | 2 | 只 |
| 17 | D1,D2,D3,D4,贴片B5819W 丝印SL | 肖特基二极管(10只) | SOD-123 | 0.11 | 4 | 个 |
| 18 | LED2、LED5 | 0805贴片LED灯,绿光 | LED_0805绿色 | 1.1 | 2 | 只 |
| 19 | LED1、LED3、LED4 | 0805贴片LED灯,红光 | LED_0805红色 | 0.88 | 3 | 只 |
| 20 | MSK-1134-3P-2H三脚贴片拨动开关 | 3脚2档 柄高2mm 小微型 | MSK-1134-3P-2H | 0.275 | 1 | 个 |
| 21 | 3.7V转5V迷你DC-DC升压模块 | 网友实测先升压5V再降压3.3V | 开发板更稳定 | 1.85 | 1 | 片 |
| 22 | 硅胶双面护线圈 | 胶圈内孔8*卡槽1.5mm(10只) | 胶圈 | 2 | 1 | 袋 |
| 23 | 直排针间距2.54MM 40P,焊接H1,H2 | HDR-M-2.54_1x15排针 | HDR-M-2.54 | 0.1 | 1 | 条 |
| 24 | ESC3,ESC1,ESC2,ESC4,90度弯针 | 弯针(顺便买2条备用) | 预留插电调 | 0.15 | 1 | 条 |
| 25 | J1电池母座 (不买可用弯排针代替) | 51005空对空电池母座 | BAT51005 | 0.07 | 2 | 个 |
| 26 | 1N5819W S4 SOD-123(备用链接)包邮 | 肖特基二极管(50只) | SOD-123 | 0.04 | 4 | 个 |
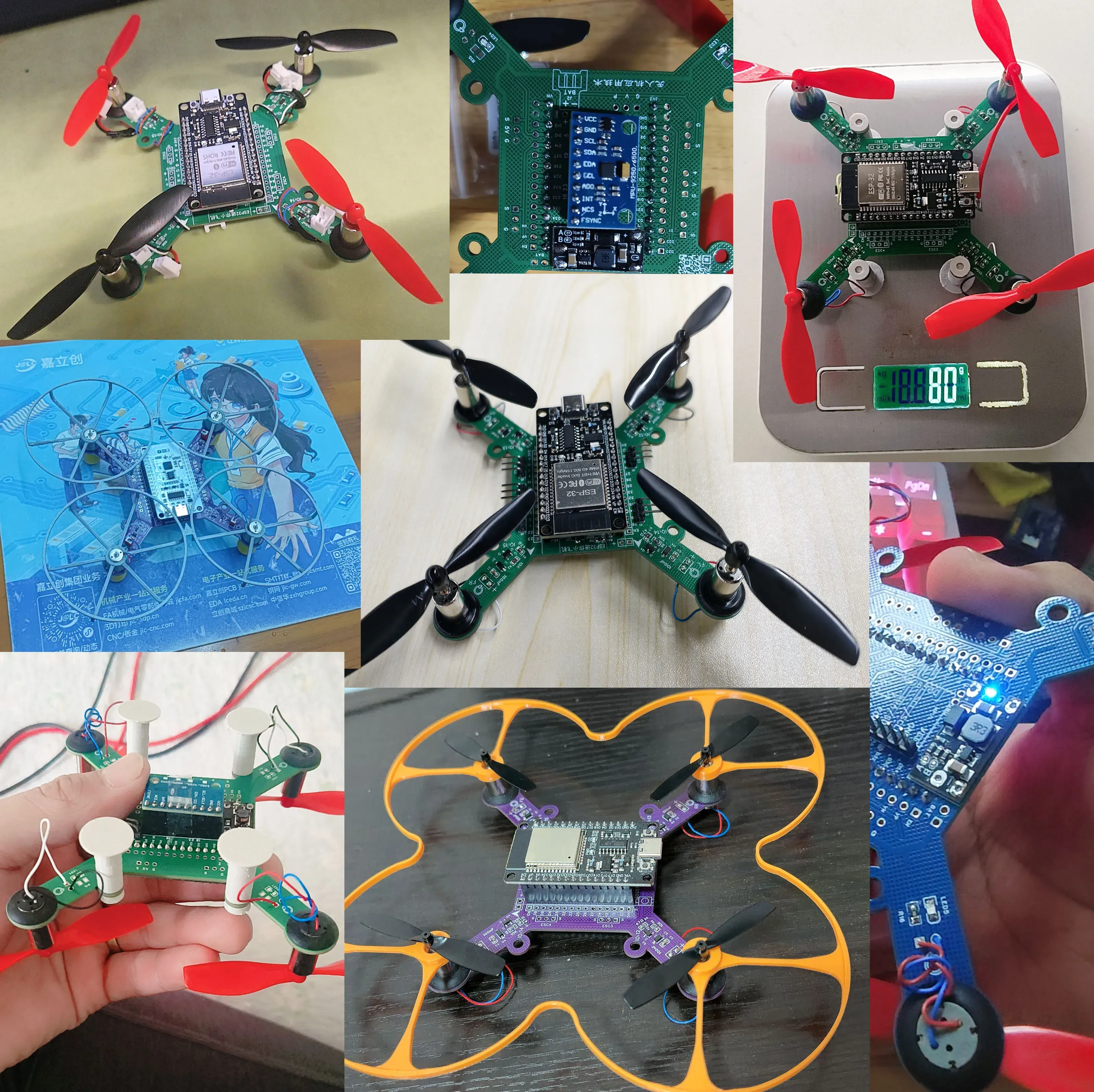
8、网友复刻展示
感谢嘉立创提供的PCB打样免费券!
PCB免费打样规则,详见官方领券专区:
https://www.jlc.com/newOrder/#/collectCoupons?spm=JLC.MEMBER
以下是2025年11月首批复刻成功案例,来自:先永、刘振生、梁木木、Evis、深淼、无忧等网友,一并感谢万能的粉丝以及潜水的网友!
看你们聊天,每天学到很多奇奇怪怪的知识(手工狗头)。
还有很多网友分享的精美小飞机复刻成果照片,可查阅群相册。

2025年12月份,讨论Q群也有大量网友复刻,并成功起飞,群友热烈讨论和分享经验,因每天大量的群消息,具体图片已无法跟网友昵称对应。
以下图片来源网友分享,感谢所有积极参与讨论分享的网友!为开源助力,再接再厉,再创新高!冲啊!
9、其他
补充一件事,之前一直忘记标注了:本项目的板框外形参考利用了邵工的YMFC开源小四轴,
https://oshwhub.com/jamesshao8/mini-drone
他这个项目是基于STM32F103C8T6芯片的小飞机,几年前我复刻过,还跟几天同学一起搞,当时没有飞起来。几个同学把那个STM32芯片焊成连锡报废(没有恒温焊台,纯用热风吹焊的)。非常感谢邵工在B站的系列讲解视频,及他的YMFC开源小四轴。
邵工B站(老邵的科创世界)https://space.bilibili.com/432749088
----------------------------------------------------------------------------------
强烈建议,初学者先去B站补充必要的基础知识,
学习嘉立创PCB打板、学习用嘉立创EDA修改PCB、学习Arduino IDE、学习ESP32基础知识、学习了解四轴无人机的基本原理,
再认真阅读本项目的工程描述!认真阅读每一段文字,对照每一张截图;相信你一定可以复刻成功的!
PCB板上丝印H1和H2,扩展排针,也可以不焊接。减重!
PCB上丝印ESC1-ESC4的位置,预留4个3p排针孔,是为了接无刷电调预留的接口,可不焊接。
你可以借助万能的AI,对Flix源代码进行魔改和拓展。
这块PCB板,如果使用ESC电调及无刷电机,
只需修改motors.ino代码中将PWM_STOP、PWM_MIN和PWM_MAX更改为适当的μs值,将PWM_FREQUENCY减小到400。
修改调试代码后,你可利用PCB机臂上预留的4个 M3的螺丝孔,安装在F450机架,并利用30A电调+2212无刷电机,起飞经典的F450无人机!
等待万能的网友魔改结果!
欢迎持续关注!
一如既往,本开源项目,也是先徒手画的PCB,再补的原理图。
在嘉立创EDA菜单,设计---检查DRC,会报“网表错误”!可以不用理会!
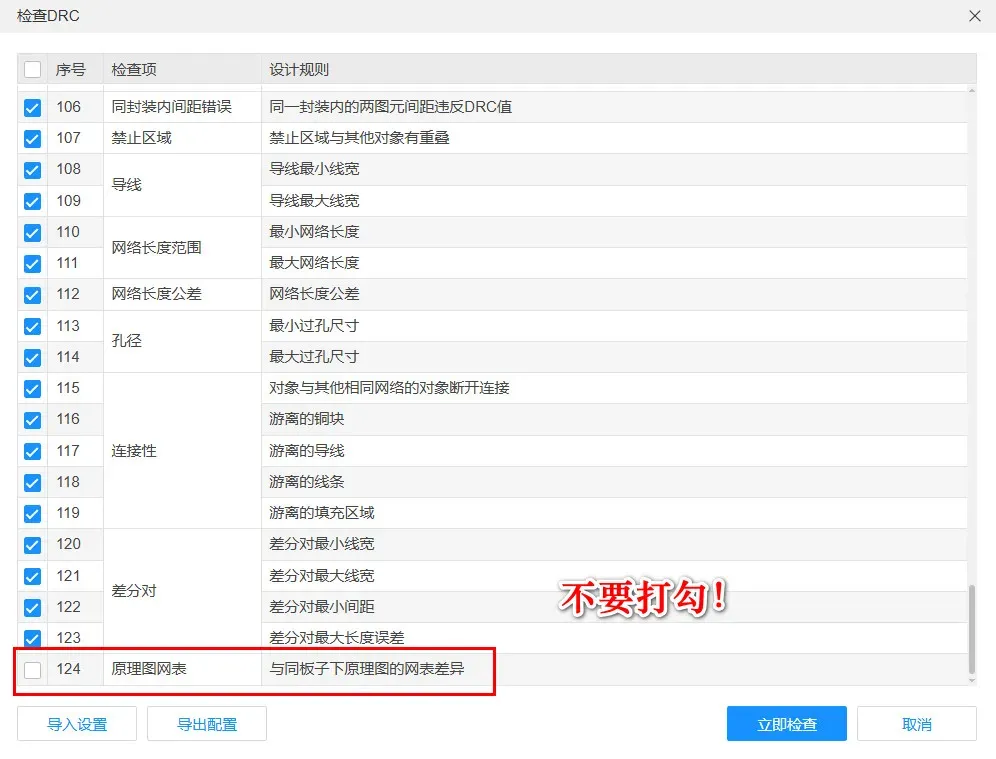
你可以在“设计”菜单,选“检查DRC(自定义)”,拉到底部,不要勾选“原理图网表”!
然后点“立即检查”,就不会爆网表错误了!打板没问题的!
10、视频演示讲解
陆续上传ESP32迷你小飞机,实物视频讲解和功能演示,发在B站“微辣火龙果”账号上。
01_开源ESP32迷你小飞机实物演示(含元件简介、组装注意事项、遥控接收机等)
https://www.bilibili.com/video/BV14vyqBFEJn/
02_ ESP32迷你无人机外场试飞
https://www.bilibili.com/video/BV1U5Q6BdEhG/
03_ESP32迷你无人机V1.4版,演示讲解
https://www.bilibili.com/video/BV1hPAMzYEHb/
04_Arduino IDE编译环境安装
05_ESP32库文件离线拷贝安装
06_ESP32迷你无人机FLix源代码简介
07_ESP32迷你无人机FLix_v1.2代码编译上传烧录演示
.....B站会继续更新相关视频....
11
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









