


专业版
机器dog工程
86
0
0
0
简介
本项目是基于ESP8266的智能机器狗,是学习物联网开发与机器人控制的理想实践案例。
简介:本项目是基于ESP8266的智能机器狗,是学习物联网开发与机器人控制的理想实践案例。复刻成本:¥100
开源协议
:GPL 3.0
创建时间:2025-03-31 21:52:47更新时间:2025-05-06 14:31:49
描述
项目功能
- 手机遥控:Wi-Fi AP模式实现无外网环境下的直连控制
- 动态表情:0.96寸OLED屏幕可以12种预制表情循环显示
- 环境信息:集成NTP网络时钟与天气API数据获取系统
项目参数
- 主控芯片:ESP8266-12F模组(工作频率160MHz,内置Wi-Fi模块)
- 显示模块:0.96寸OLED(SSD1306驱动,分辨率128×64)
- 输入电压:2串14500锂电池(7.4V-8.4V)
- 稳压方案:双路AMS1117(5V+3.3V独立输出)
- 运动机构:3×SG90舵机(4.8V供电,180°版本带机械限位)
- 通信协议:TCP/IP协议栈,自定义二进制指令集
- 预留两个按键和一个简单的拓展接口
原理解析(硬件说明)
本项目由以下部分组成,电源部分、主控部分、ADC采样部分、IIC屏幕部分和舵机电路,本项目主要是通过手机连接ESP8266控制机器狗的动作,屏幕显示主要信息。
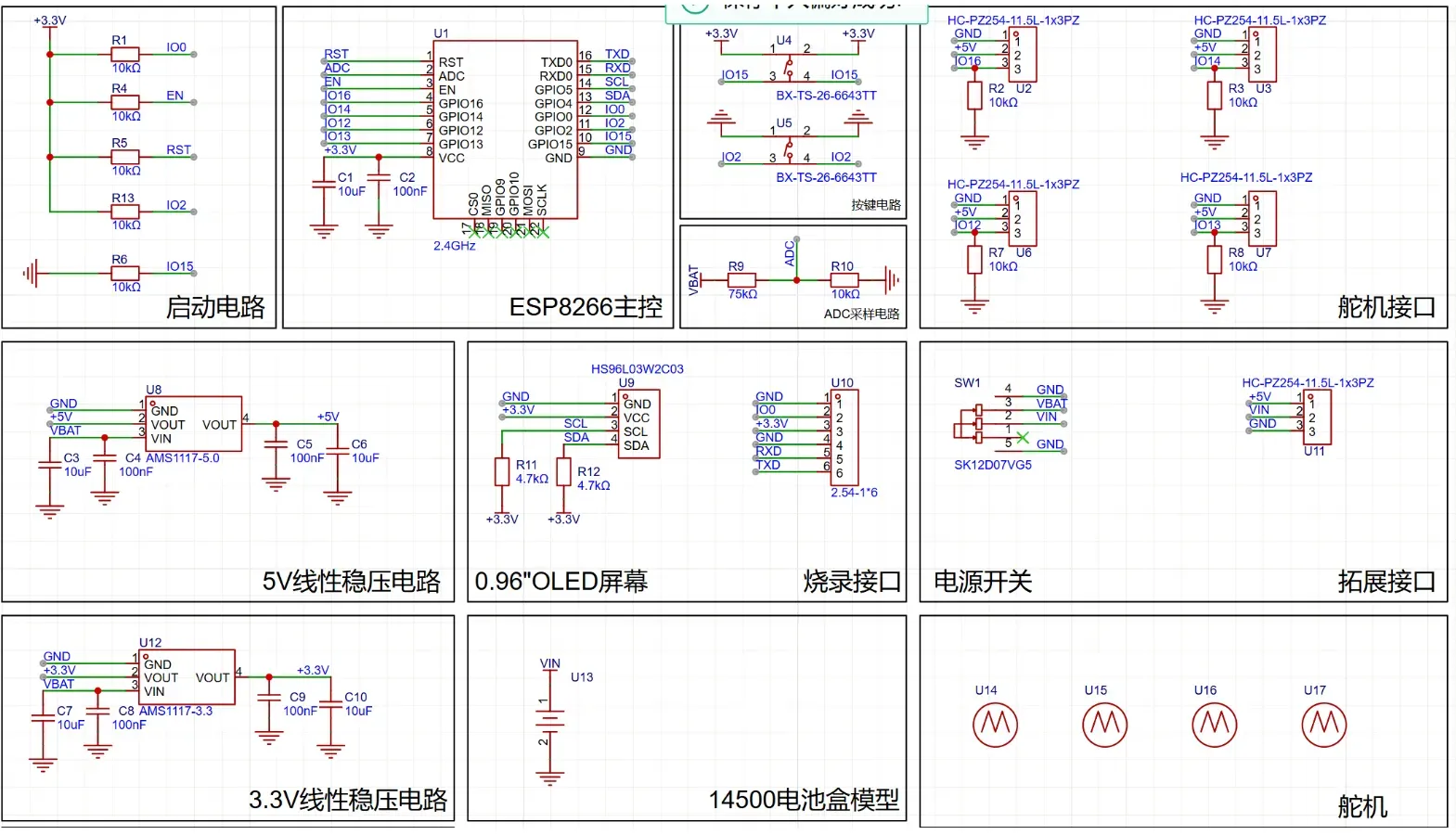
(1)ESP8266模组外围电路/0.96寸OLED屏幕
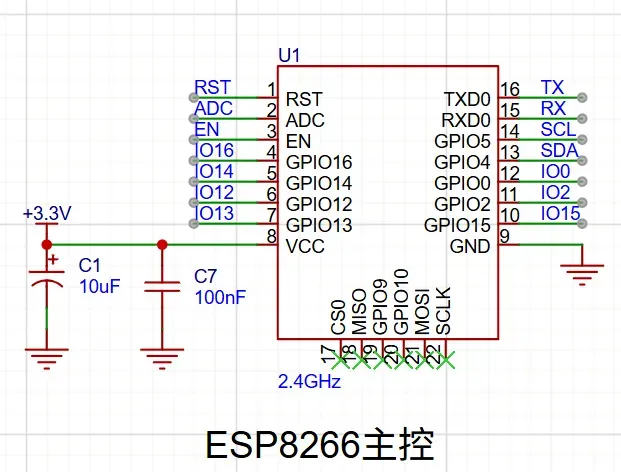
本项目采用乐鑫科技的ESP8266作为主控。ESP8266以其高集成度,优异的RF性能和低功耗著称,集成了完整的wifi功能,适合物联网应用开发。
通过直接将屏幕模组与主控模块的IIC接口相连,即可完成图像和信息的显示。我们通过查阅屏幕模组的技术规格,确认了引脚排列、接口类型以及屏幕的功耗需求,确保其与主控电路的匹配性。
(2)电源电路
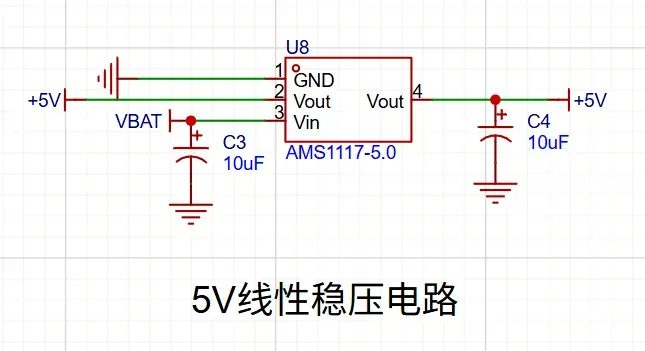
AMS1117-5是5v稳压芯片,主要为舵机提供5v电源
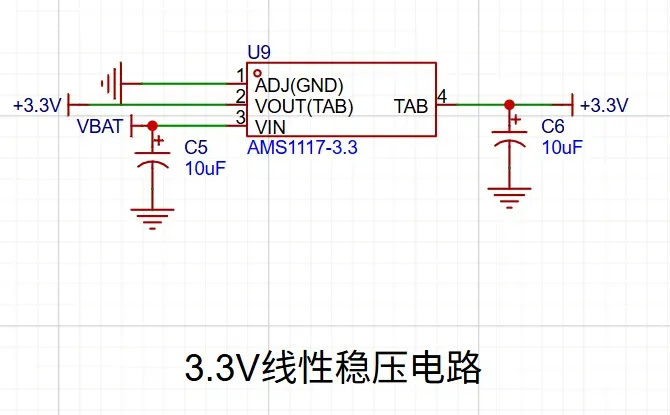
AMS1117-3.3是3v稳压芯片,主要为主控和其他需要3.3v供电的外设提供电源
(3)ADC电量检测电路
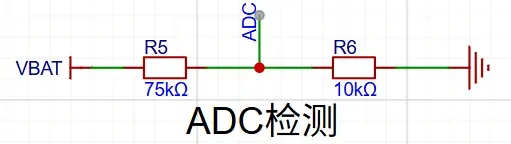
修改分压器适配8.4V到1V 现在需要适配新的输入电压范围(最大8.4V)到ESP8266的1.0VADC输入
(4)舵机驱动电路
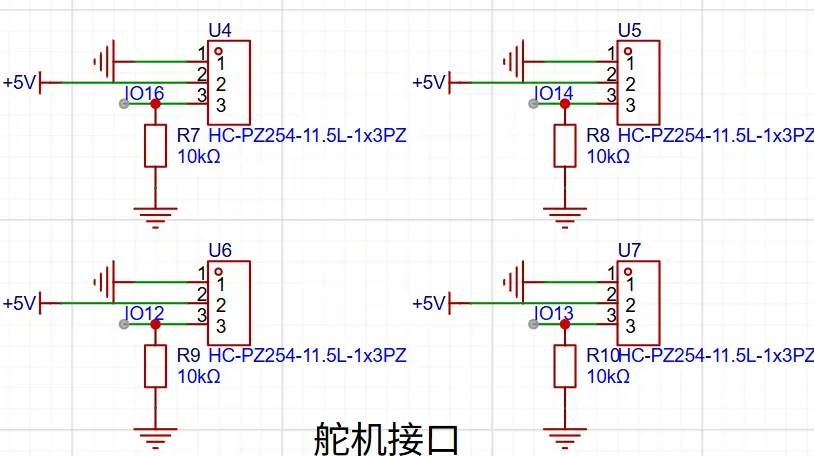
建议可以增加下拉电阻,确保电机停转和起始状态稳定,在后续的软件调试中也会更方便。
实物图


设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论