

四足八自由度机器人|乐高兼容|JS脚本驱动|物联网集群控制
简介
本项目是一款基于 ESP32-C3 的四足八自由度机器人。它通过手机APP或浏览器进行姿态编辑与动作编排,并支持从服务器动态下载动作脚本。机器人内置 JavaScript 脚本引擎,可通过网络远程下发
简介:本项目是一款基于 ESP32-C3 的四足八自由度机器人。它通过手机APP或浏览器进行姿态编辑与动作编排,并支持从服务器动态下载动作脚本。机器人内置 JavaScript 脚本引擎,可通过网络远程下发开源协议
:GPL 3.0
描述
一、 项目简介
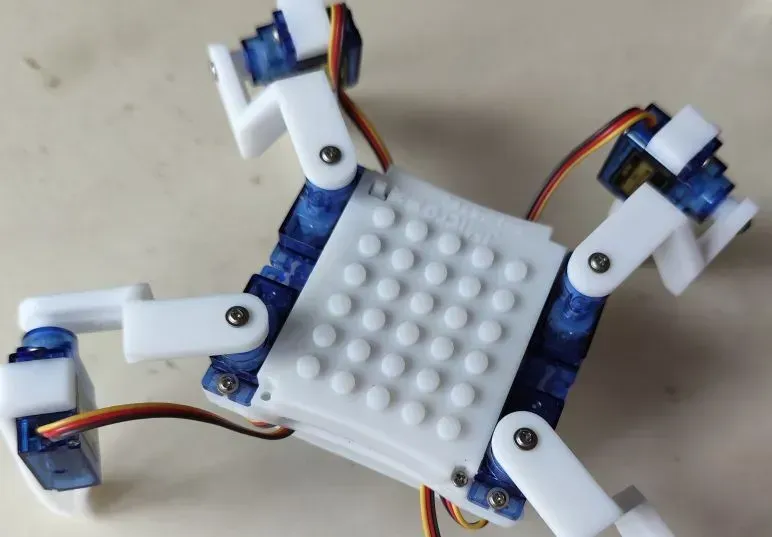
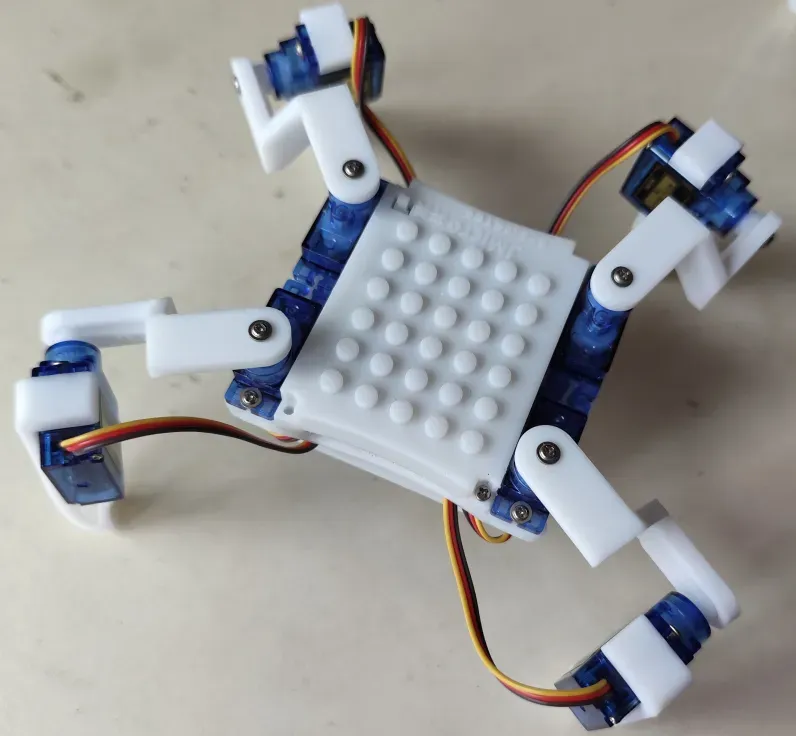
本项目是一款基于 ESP32-C3 的四足八自由度机器人。它通过手机APP或浏览器进行姿态编辑与动作编排,并支持从服务器动态下载动作脚本。机器人内置 JavaScript 脚本引擎,可通过网络远程下发脚本执行复杂逻辑。同时,它基于同一固件平台能与物联网终端(86开关、传感器等)互联互动。机器人上盖兼容乐高积木,GPIO通过2.54排针引出,既是智能机器人,也是一块可编程的物联网开发板。本项目适合机器人爱好者、物联网开发者及STEAM教育人群。
视频:
https://www.bilibili.com/video/BV1WVRXBdEro/?vd_source=33c496e15f18b834a73435ab9b4feddb
https://www.bilibili.com/video/BV1q2RQB5Eqw/?vd_source=33c496e15f18b834a73435ab9b4feddb
IDE开发环境,从开发,测试,烧录,运行,日常维护,AI大模开集成,全流程支持环境
二、 详细介绍
✨ 核心特性
-
八自由度灵活运动
-
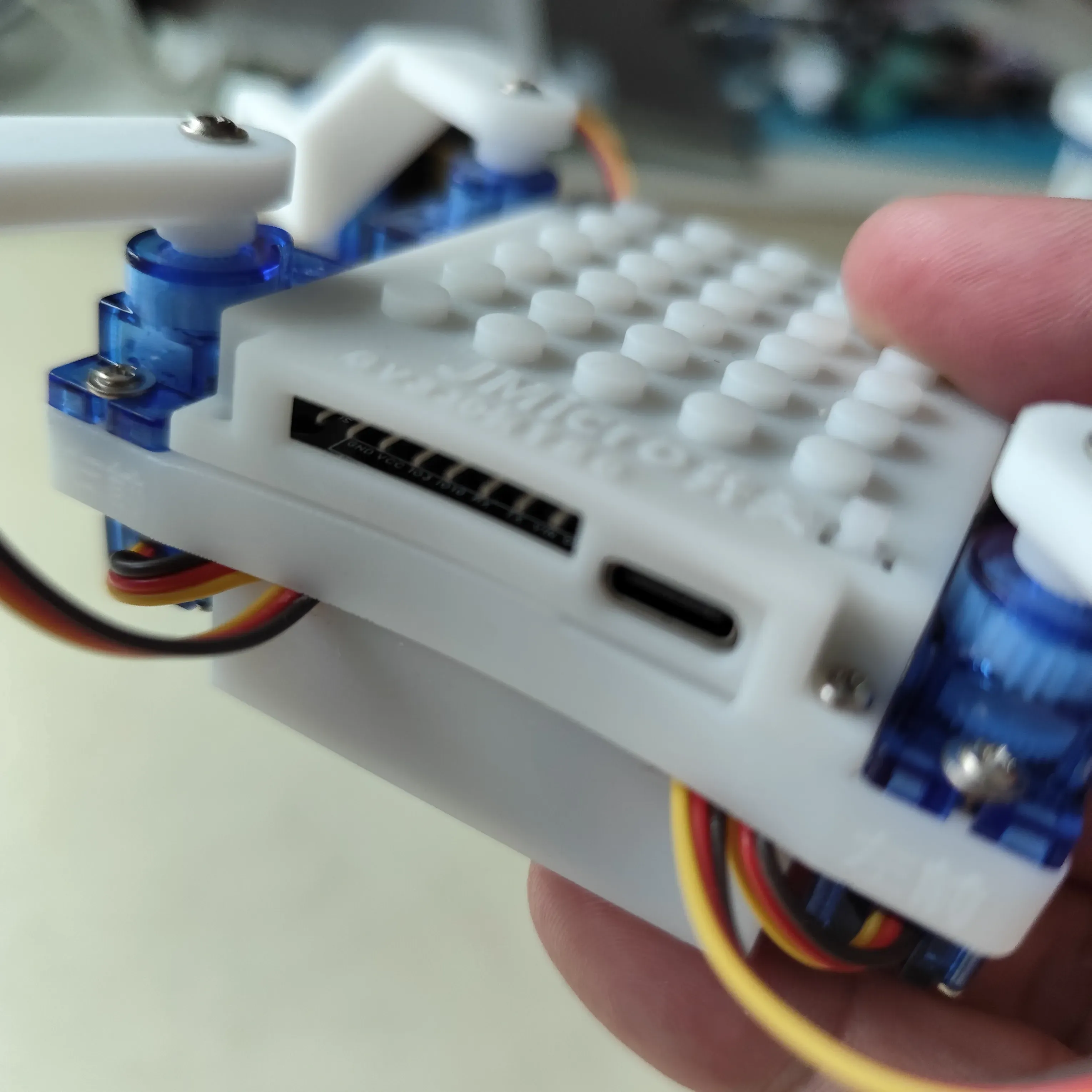
采用8个SG90舵机,组成四足(每条腿2个关节:一个髋关节、一个膝关节)。
-
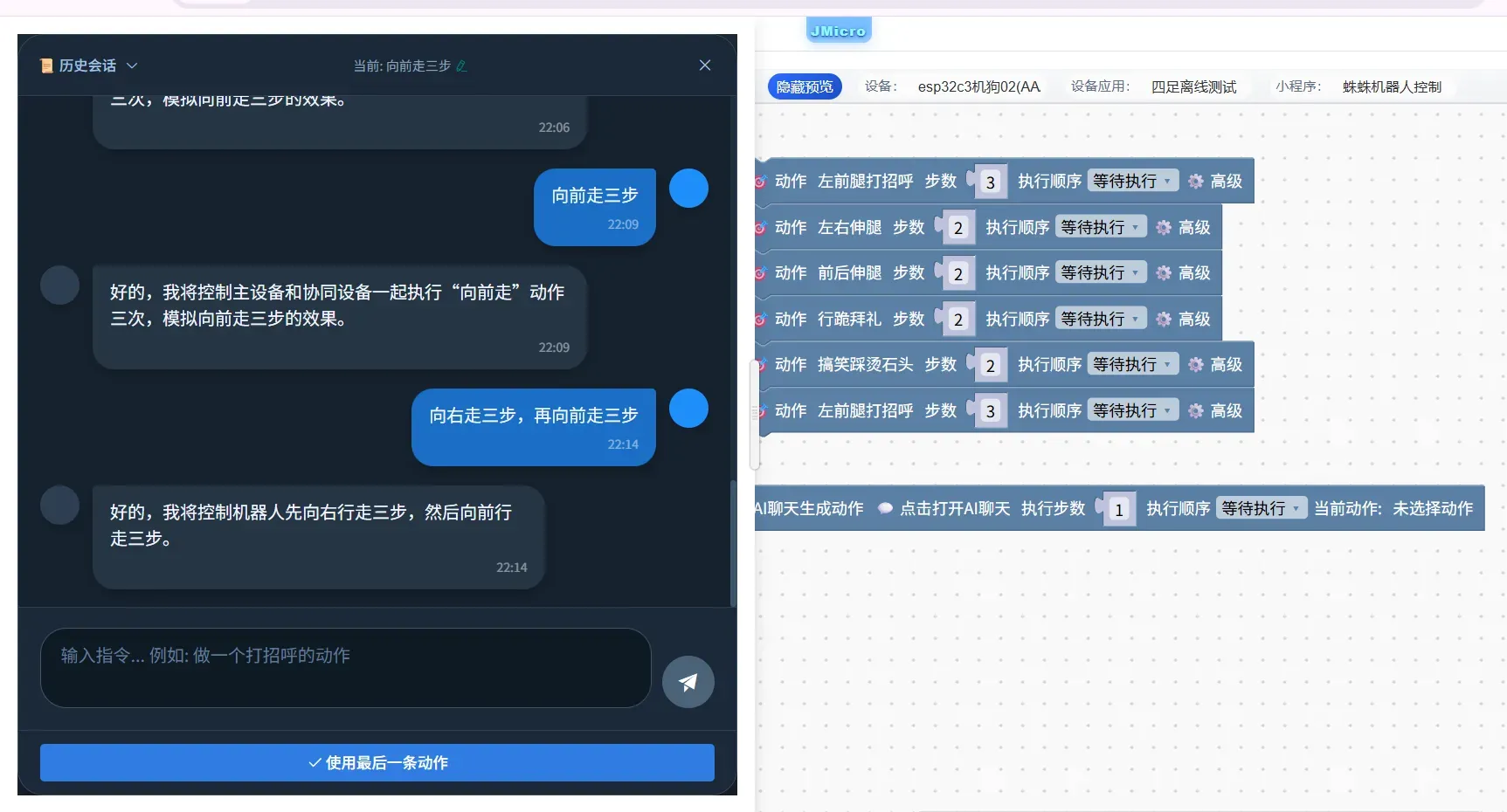
支持通过手机APP对每个舵机角度进行实时调节,可保存和组合姿态,实现行走、转向、匍匐、舞蹈等动作序列。

-
-
远程动作管理与AI扩展
-
动作姿态数据与动作序列存储在服务器端,机器人动态拉取并执行,海量动作免费供你玩耍。

-
预留AI设计动作接口,可通过算法生成姿态,由AI模型实时控制机器人执行。
-
-
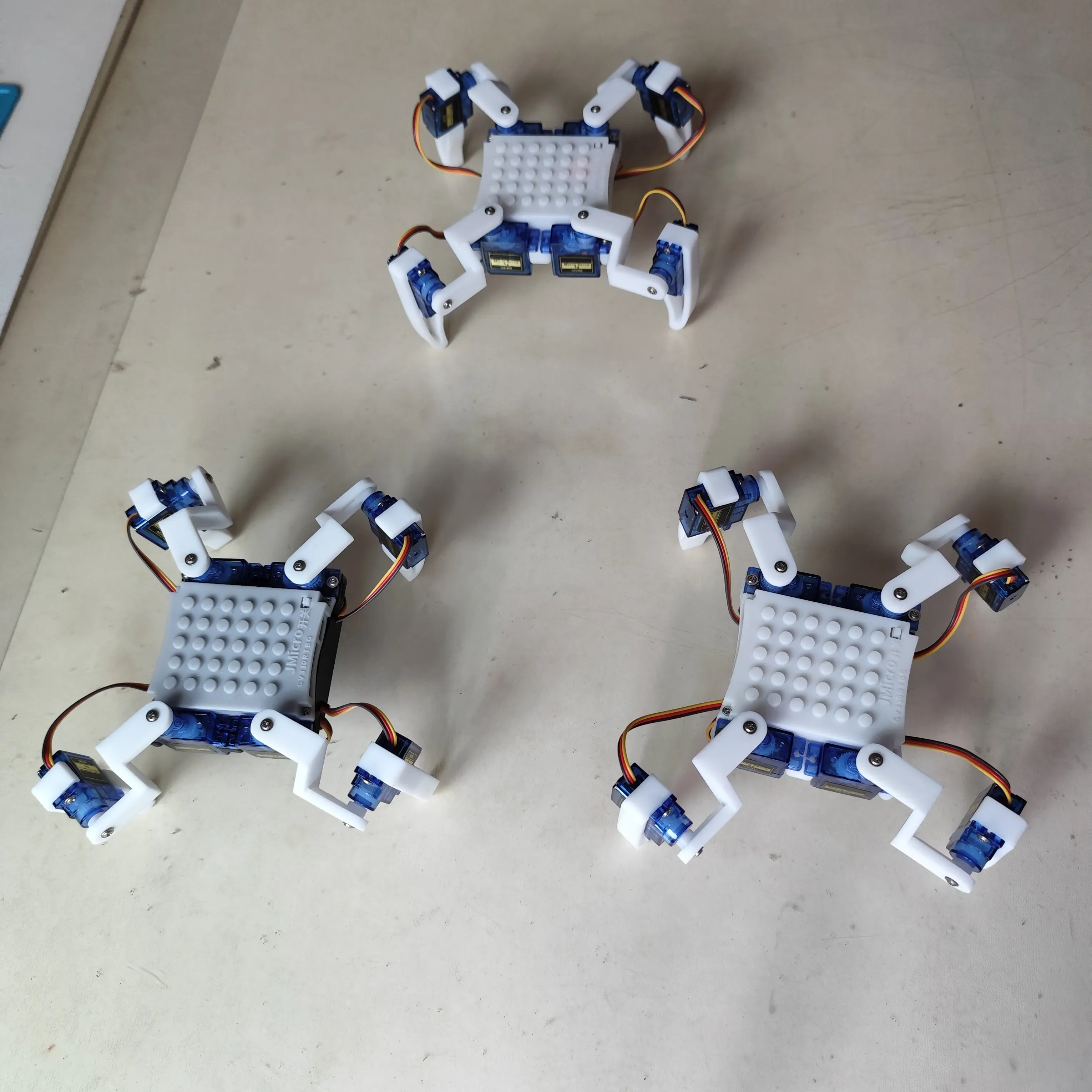
多机器人集群控制
-
通过网络(局域网或互联网),一套APP/浏览器可同时向多个机器人下发同步动作,实现类似春晚机器人集体表演的效果。
-
-
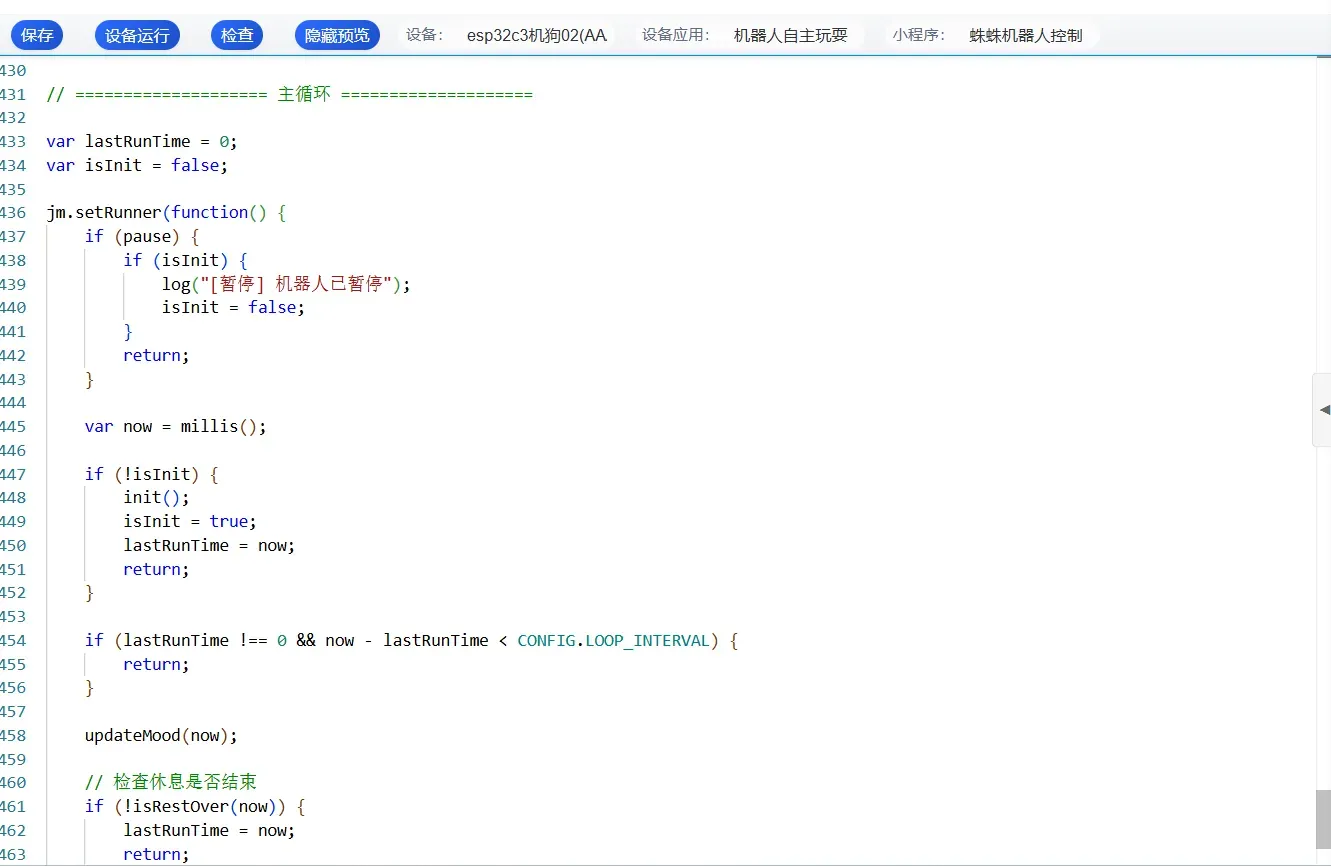
基于Web的可视化编程环境
-
提供浏览器端的IDE,支持:
-
图形化编程(拖拽式逻辑编排),官方支持一体化的多用途开发环境。

-
JavaScript 脚本直接编写
-
-
支持通过网络将JS脚本分发给机器人执行,实现功能无限的远程控制。
-
-
物联网(IoT)融合能力
-
同一固件平台已适配多种物联网终端:86盒智能开关、继电器模块、人体传感器、门窗传感器等。左边的命令可以运行于不同的设备上,设备与设备之间相互发送命令

-
机器人可直接与这些设备相互通信(例如:传感器触发 → 机器人执行特定动作;机器人到达位置 → 打开继电器控制风扇)。
-
-
扩展与改造能力
-
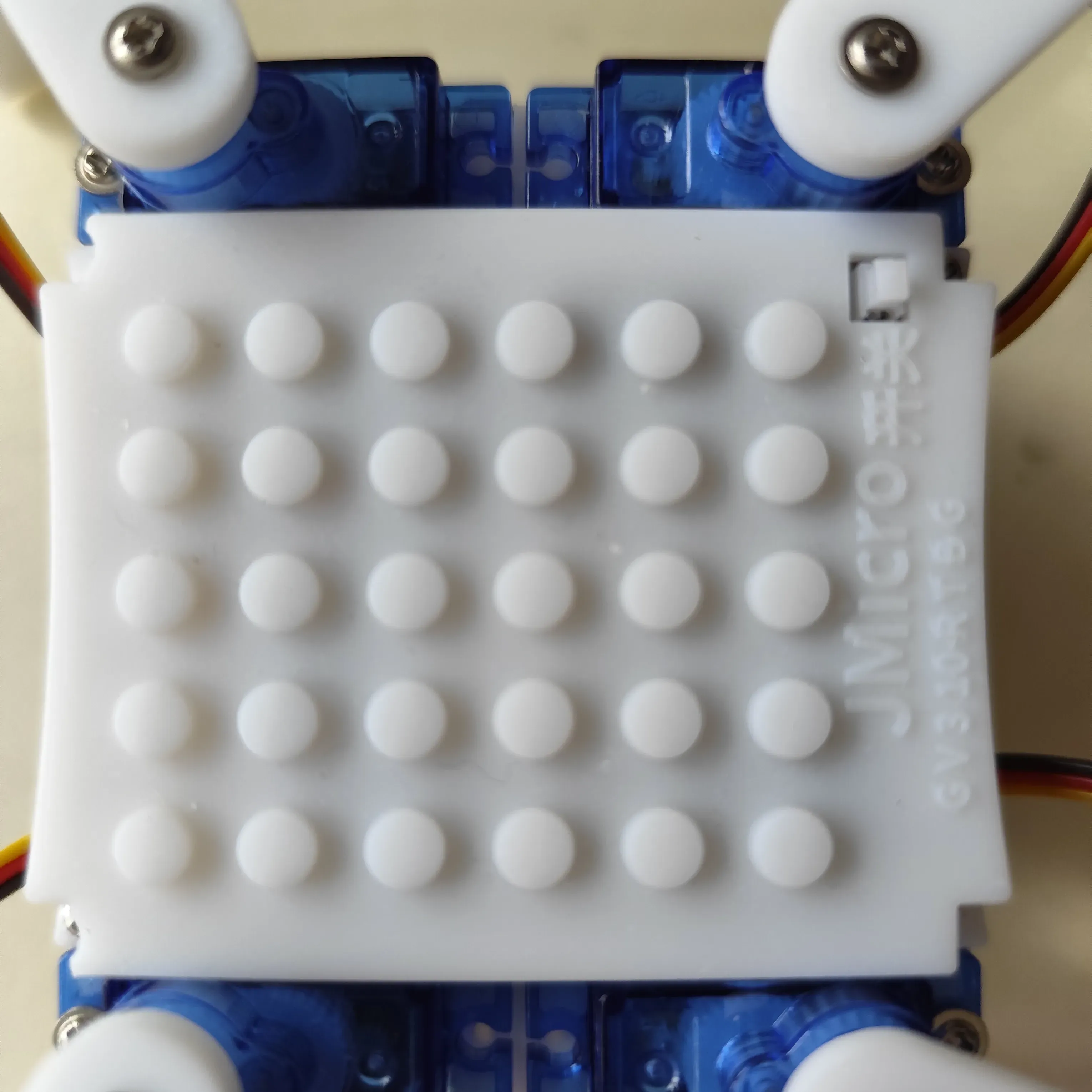
顶板兼容乐高积木:可自由拼搭外观,打造独特造型。
-
2.54mm排针引出4个GPIO + 3.3V / Vbat / GND:可外接LED、传感器、舵机、通信模块等,像开发板一样使用。
-
固件支持OTA升级与JS脚本热更新,无需反复烧录。
-
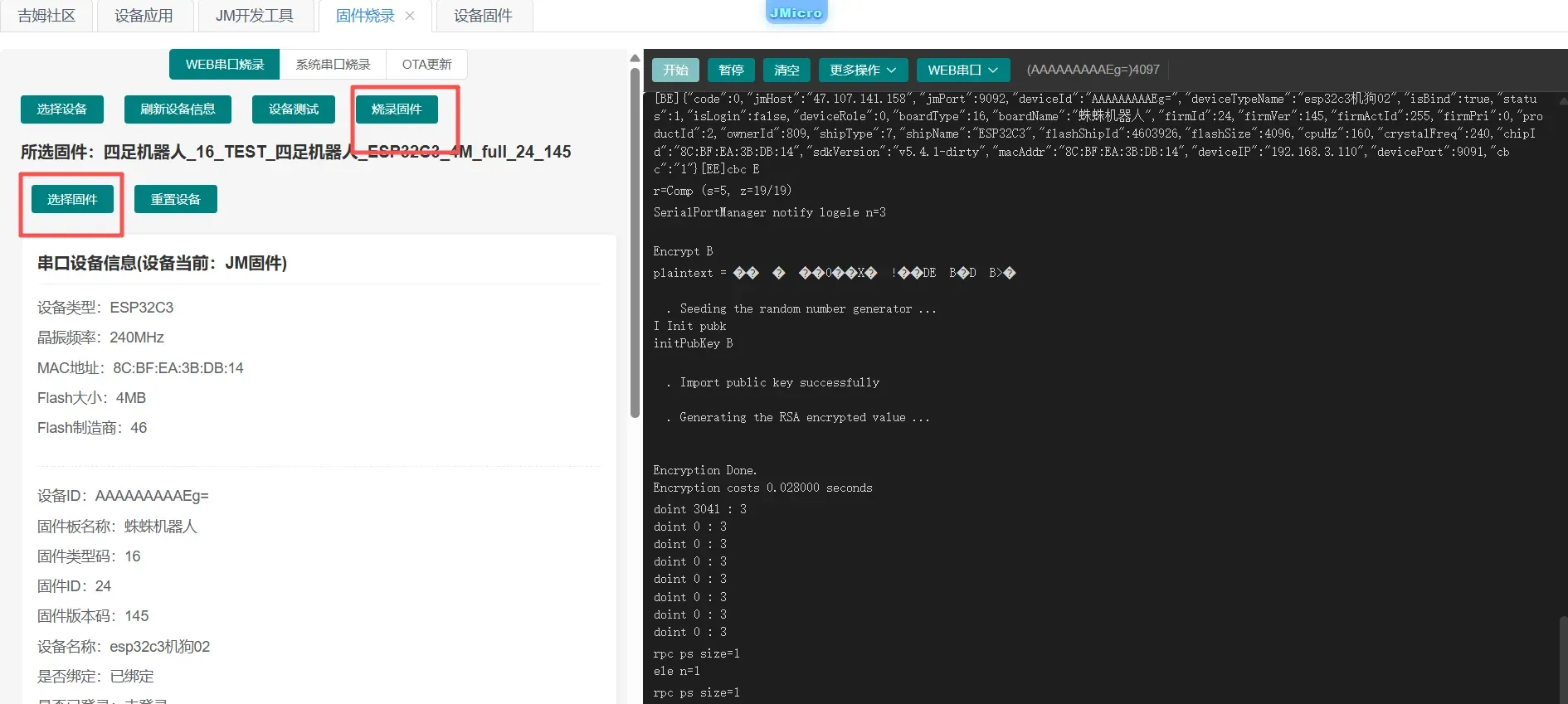
🔧 固件烧录
基于浏览器的一体化的开发环境中简单几步就可以烧录
🔧 硬件构成
| 组件 | 型号/规格 | 说明 |
|---|---|---|
| 主控 | ESP32-C3(RISC-V架构,Wi-Fi/BLE) | 低功耗,性价比高 |
| 舵机 | SG90(9g舵机) x8 | 4腿 x 2自由度 |
| 供电 | 3.7V锂电池 直供电舵机 | 提供3.7给舵机 |
| 引出接口 | 2.54排针 x4(GPIO) + 3.3V + 电池电源 + GND | 开发扩展 |
| 机械结构 | 3D打印支架 + 乐高兼容顶板 | 可自行打印或改造 |
💻 软件与固件能力
-
基础固件:基于ESP-IDF / Arduino,实现PWM舵机驱动、Wi-Fi连接、OTA、JSON指令解析、JS脚本引擎(例如搭载mJS或JerryScript)。
-
动作系统:姿态(9个舵机角度) → 动作(多个姿态+时间) → 脚本(动作组合+逻辑)。
-
通信协议: UDP通信,机器人与机器人之间,机器人与手机APP及后台通信,规范标准对外接口,实现手机或浏览器甚至三第系统直接给机器人发指令,状态查询等。
-
IDE:浏览器端Blockly(图形化) + Monaco编辑器(JavaScript),支持脚本保存、执行、停止、列表查询。
🎯 典型应用场景
-
机器人编程教学与竞赛
-
物联网+机器人联动展示(触发启动、情景剧表演)
-
远程机器人调试与控制实验室
-
乐高造型创意设计
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论