

多功能履带车
简介
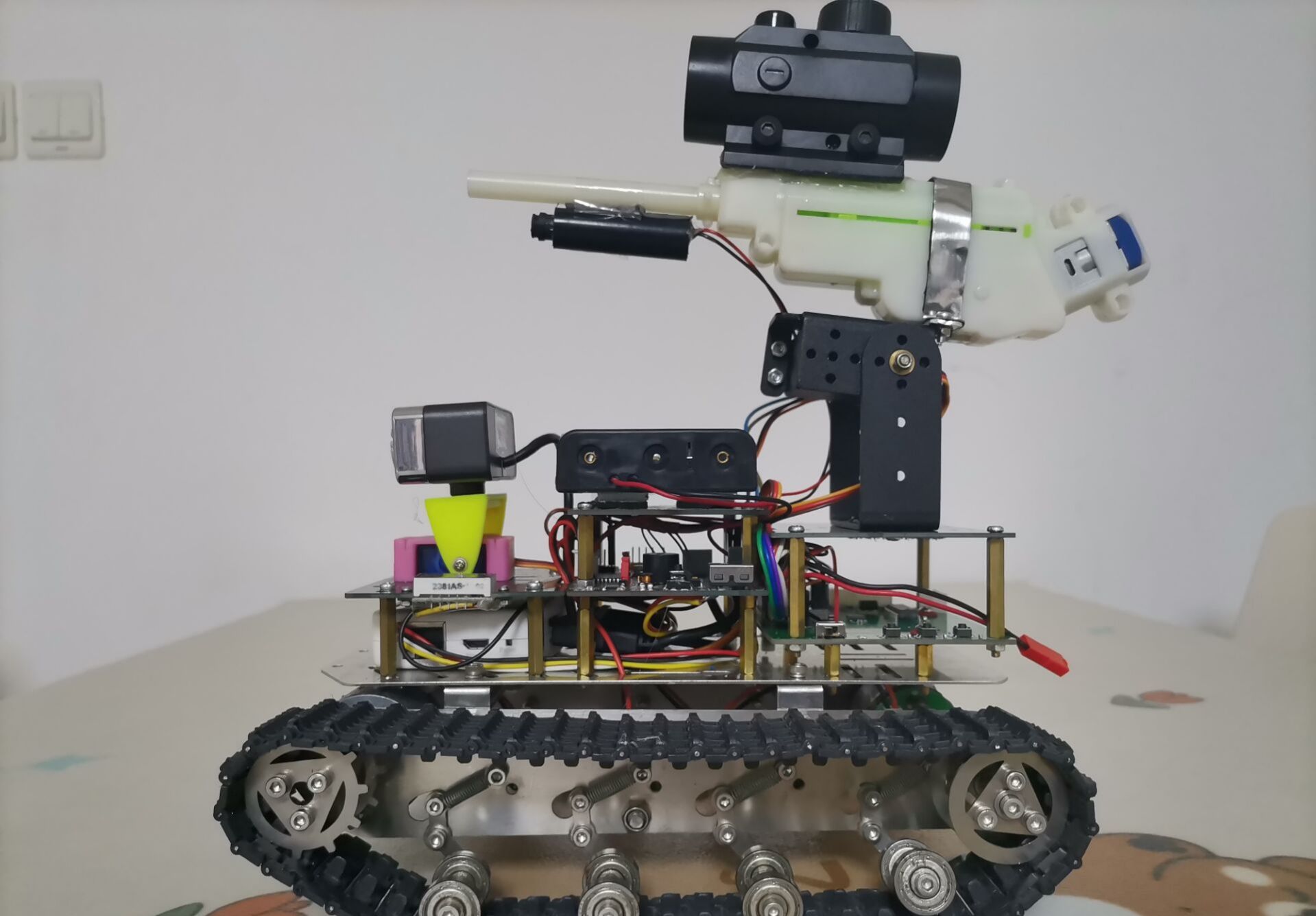
采用金属履带车底盘,使用高清摄像头和wifi路由器,通过无线与手机连接,可通过手机接收视频和控制履带车,能够加装水弹枪组件或者机械抓。
简介:采用金属履带车底盘,使用高清摄像头和wifi路由器,通过无线与手机连接,可通过手机接收视频和控制履带车,能够加装水弹枪组件或者机械抓。开源协议
:GPL 3.0
描述
项目说明
本项目中的履带车底盘、无线路由器、高清摄像头、水弹枪组件采用成品,其他的,包括主控板、旋转云台扩展板,旋转云台等均是自行设计。
项目相关功能
1.履带式底盘,2个减速电机作为动力,整体负重能力、爬坡能力、通过性较好。
2.采用L293D作为电机驱动,可通过PWM控制电机的正反转以及调速。
3.可以通过手机APP来控制履带车前进、后退、左转、右转,还可以控制舵机以及水弹枪的发射、底盘灯光、红外线激光的打开和关闭,同时手机上实时显示履带车摄像头采集到的画面。
4.履带车摄像头通过一个舵机与底盘相连,可进行俯仰操作。
5.主控板上有两路由MOS管控制的电源,1路是5V,1路是12V(输入电压)。本项目中5V是给红外线激光头供电的,12V是给灯带供电的,可通过手机APP来控制打开或者关闭。
6.包含了3.3V转5V的电平转换电路,用于驱动WS2812B灯带。
7.预留NRF2401模块接口,方便后期使用遥控器来控制履带车。
8.预留超声波接口,用于后期加装超声波模块。
9.预留4路舵机接口,本项目只使用了2路,一路控制摄像头俯仰,另一路控制水弹枪俯仰。
10.主控板包含蜂鸣器电路,用于发出报警声以及低电压报警。
11.车体加装水弹枪组件,可以发射水弹,使用MG996舵机控制俯仰,方位跟随车体一起旋转。水弹枪的电源采用2S锂电池单独供电,采用MOS开关控制,手机APP屏幕双击一次,水弹枪点射一次。
12.水弹枪的炮管下加装了1个红外线激光头,激光头模块和3.3V稳压模块封装在一个圆柱形的管子里,只需5V供电即可。
13.增加了一块旋转云台扩展板,此电路采用2S锂电池单独供电,预留了与主控板连接的控制接口。电路包含了DC-DC 5V降压电路,LDO 3.3V稳压电路,6路MOS控制的电源输出电路(2路3.3V,2路5V,2路VIN),一路ULN2003的驱动电路(用来驱动28步进电机),还有3路按键开关。
14.步进电机旋转云台,采用28步进电机,通过一个空心转盘轴承与云台上面的旋转部分连接,可加装水弹枪或者其他人物设备。目前该部分实物已完成,已进行通电测试,360度旋转很顺畅,唯一存在的一个问题,电机轴与云台上半部分连接有虚位,因固定螺丝被轴承遮挡,无法固定紧,影响水弹枪射击精度,暂时先不加装此云台,后期解决该问题后再说。
设计原理
1.系统稳压电路采用DC-DC降压电路, 输入电压范围4.7V至28V工作输入范围(本项目采用3节18650电池供电),最大输出电流3A,本项目中输出电压为5V,用来给全系统供电。

2. LDO稳压电路采用AMS1117-3.3,主要用于给单片机供电以及一些低功耗的外设供电。

3.主控采用STM32F103R8T6,主要是其引脚多,网上资源较多,方便开发。

4.采用L293D作为电机驱动,款电压输入输出,可PWM调速。

5.电平转换电路。

6.由MOS控制的两路电源。

7.蜂鸣器驱动电路。

下面是旋转云台扩展板电路
1.同样是DC-DC降压电路,默认输出5V。

2.MOS控制的电源输出电路,输出电压大小为VIN,一个用于小功率的输出,一个可大功率输出。


3.MOS控制的电源输出电路,输出电压分为3.3V和5V,各有2路。


4.步进电机驱动电路,采用ULN2003L作为驱动芯片,可以驱动普通的28步进电机。

5.增加了3个按键开关,用于扩展一些需要设置或者启停的功能。

6.扩展板的接线端子。根据需要,使用杜邦线与主控板连接。

软件说明
1.程序部分
程序采用KEIL软件开发,主要就是串口接收无线路由器串口发过来的数据并进行解析,根据解析后的命令进行相应的动作,这里只展示部分内容。
程序已经放在附件里了,请自行下载。




2.APP部分
因能力有限,我这里直接使用了现成的APP,网上搜索wifirobot,或者打开这个链接下载https://www.muzhijita.com/apk-fk-5020.html

实物展示




补充几张旋转云台的照片



设计注意事项
1.水弹枪不可对人发射,水弹也不能给小孩玩耍,以免误食。
2.不可使用红外激光照射人眼,以免造成伤害。
其他
需要说明一下,本项目的履带车底盘,包括无线路由器和摄像头是从咸鱼上买的二手的,对应的产品在网上已经找不到了,不建议网友复刻。另外,本项目使用了小r科技wifirobot APP,因涉及是否侵权的问题,这里只提供了相关网页链接,不提供APP软件,建议有能力的网友自行开发APP。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









