

专业版
pid练习
36
0
0
0
简介
本项目旨在为初学者提供一个学习PID控制算法的入门套件。使用立创·天猛星 MSPM0G3507 开发板作为主控单元,配合BDR6126D电机驱动和1.9寸中景园SPI屏幕,实现对带编码器电机的速度控制
简介:本项目旨在为初学者提供一个学习PID控制算法的入门套件。使用立创·天猛星 MSPM0G3507 开发板作为主控单元,配合BDR6126D电机驱动和1.9寸中景园SPI屏幕,实现对带编码器电机的速度控制复刻成本:¥50
开源协议
:GPL 3.0
创建时间:2025-04-29 11:22:13更新时间:2025-06-11 17:34:20
描述
1. 控制功能
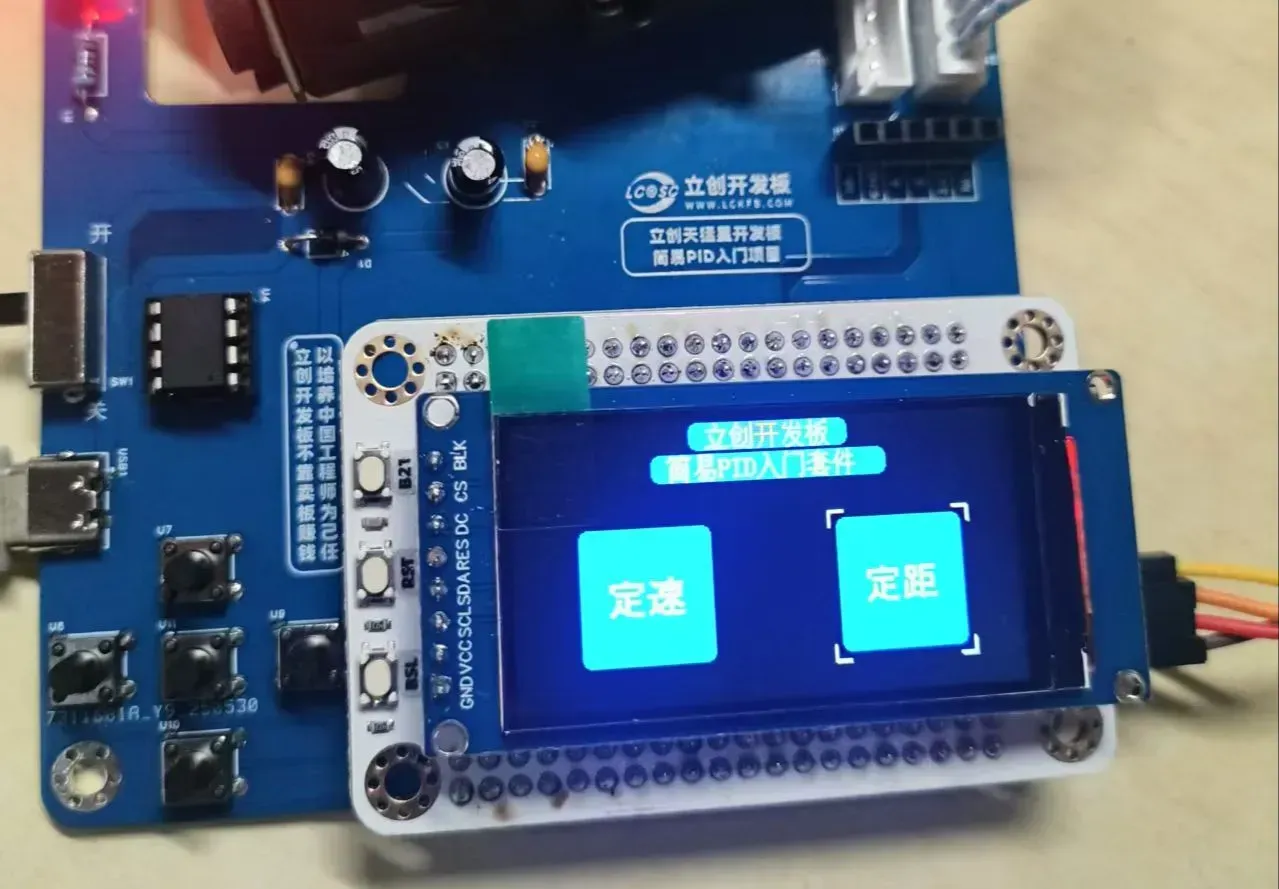
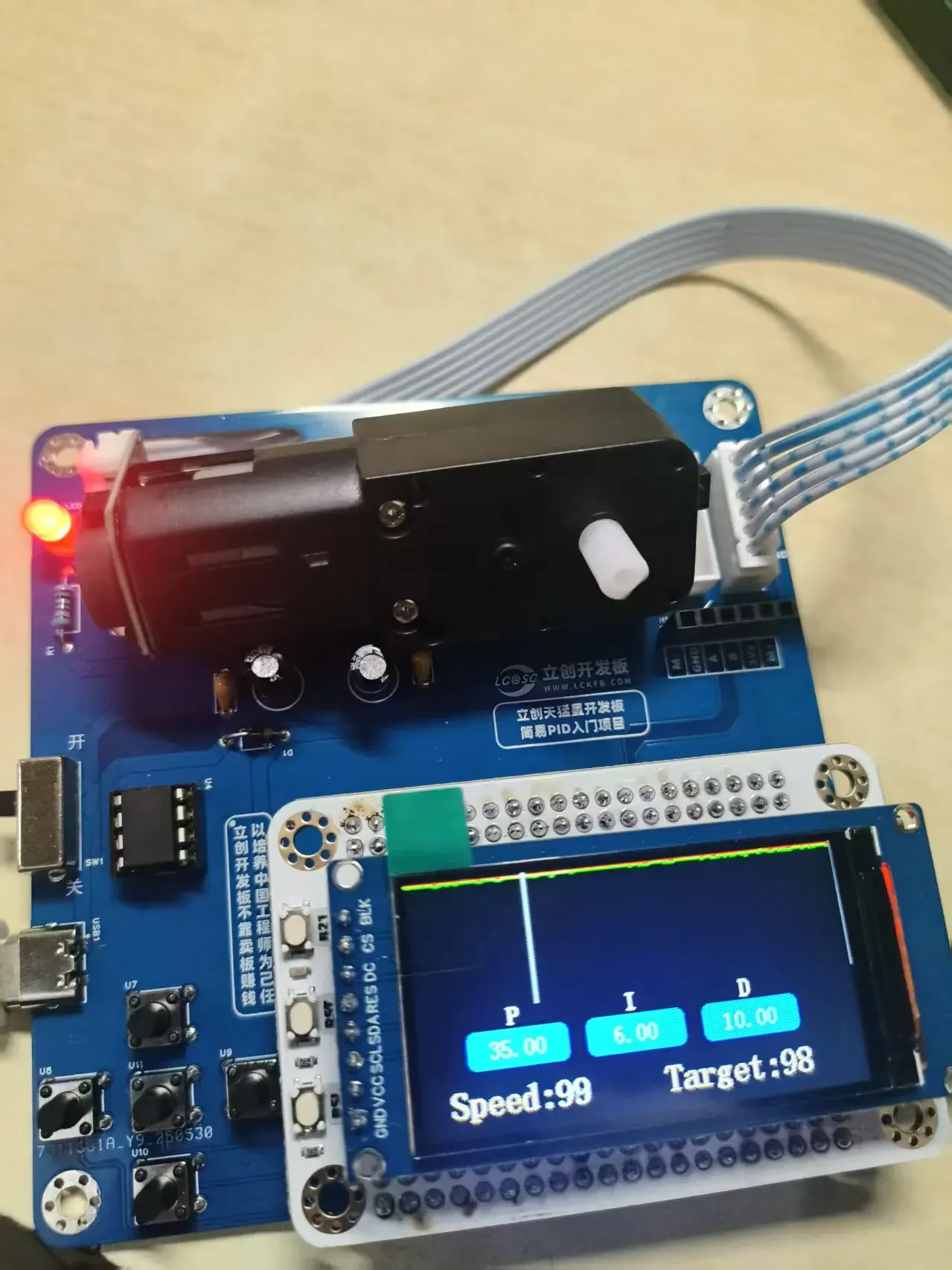
定速控制:设定目标速度,实时监控电机当前转速,通过 PID 算法调整 PWM 占空比使电机以最优路径趋近目标速度。
定距控制:设定目标位置(以编码器脉冲为单位),通过 PID 算法实现精确到位控制。
2. 用户交互
五向按键(上、下、左、右、中)支持短按、长按设置参数与翻页
TFT SPI 显示屏显示当前运行页面、目标/当前值、PID 参数和曲线
3. 可视化
实时 PID 控制曲线
多页 UI:主页面、定速页面、定距页面
参数设置界面(Kp、Ki、Kd)
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论