
专业版
智能机器狗实训y
154
0
0
0
简介
本项目是基于立创开源的EDA-Robot机器狗的基础上增加电源管理芯片和语音识别模块的设计。
简介:本项目是基于立创开源的EDA-Robot机器狗的基础上增加电源管理芯片和语音识别模块的设计。开源协议
:GPL 3.0
创建时间:2025-03-18 23:05:55更新时间:2025-05-06 14:11:35
描述
项目简介
本项目是基于立创开源的EDA-Robot机器狗的基础上增加电源管理芯片和语音识别模块的设计。
项目功能
- 语音交互
- 电源管理
- 人机交互
项目参数
- 采用ESP8266主控,通过WIFI联网控制
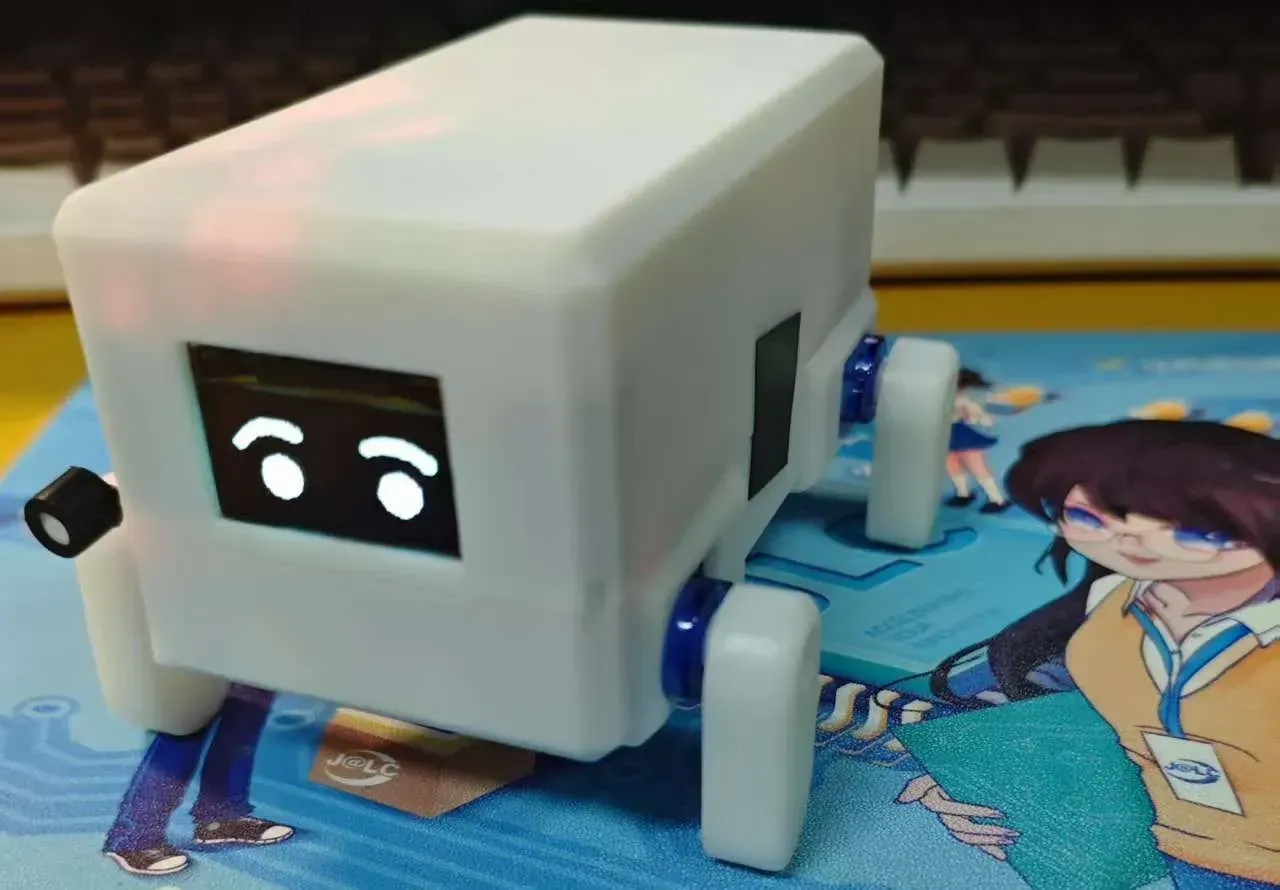
- 0.96寸OLED显示屏(128×64分辨率)
- 双14500锂电并联(3.7V/2000mAh×2)
- 采用IP5306电源管理芯片实现5V/2A稳定输出
- AMS1117-3.3低压差线性稳压器提供3.3V/800mA控制电路供电
- 采用SG90舵机180度版本,无需电机校准
原理解析(硬件说明)
本项目由以下部分组成,电源部分、TYPE-C部分、ESP8266主控部分、外部接口部分。
1.电源电路:
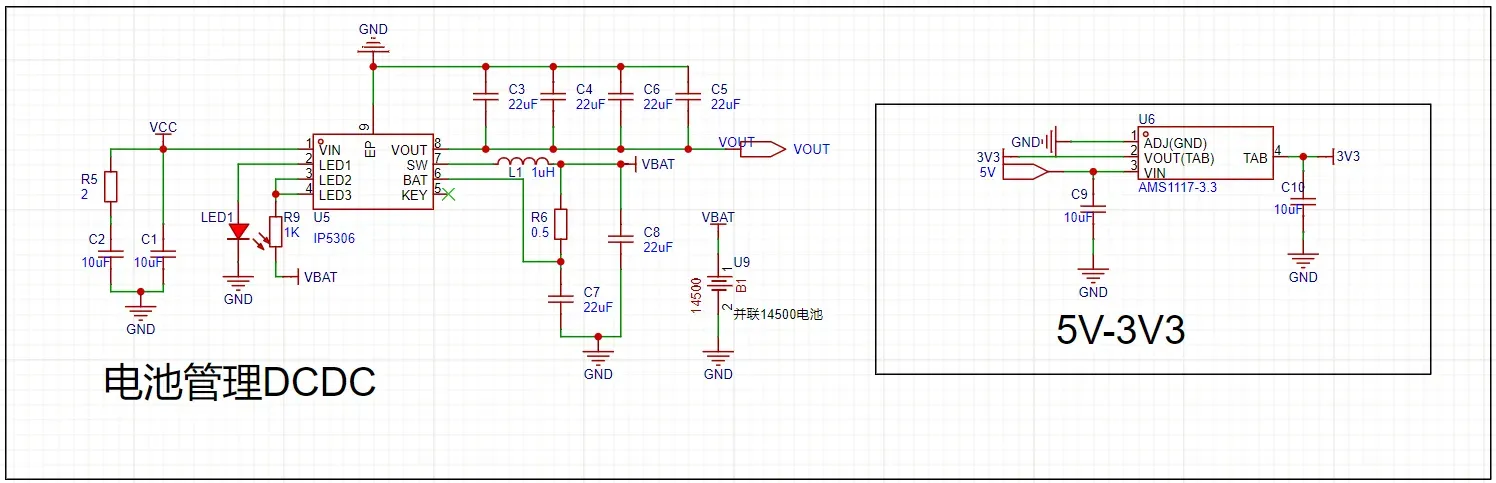
采用两级稳压:IP5306芯片将锂电池电压升压至5V后,一方面直接驱动SG90舵机组(工作电压4.8-6V),另一方面通过AMS1117-3.3转换器生成3.3V为ESP8266主控及外围电路供电。
2.ESP8266主控部分:
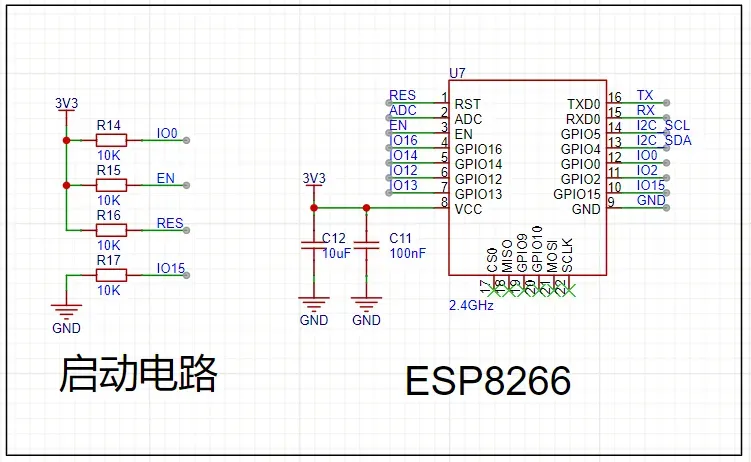
- EN使能引脚配置10kΩ上拉电阻
- GPIO0/GPIO2设置硬件启动模式选择电路
- SPI片选信号(CS)通过10kΩ下拉确保通信稳定性
3.TYPE-C电路:
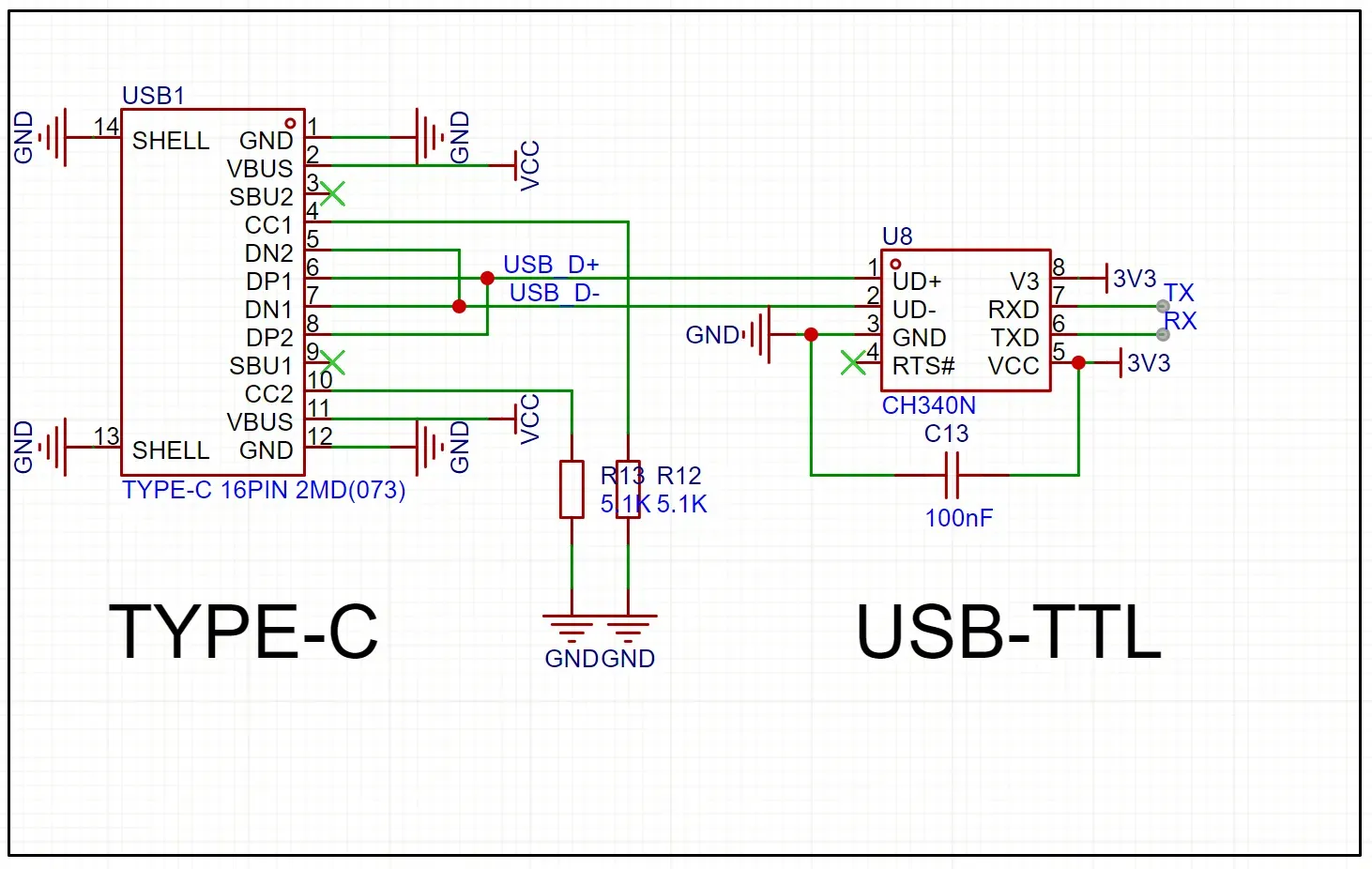
此部分利用TYPE-C配合CH340N为ESP8266烧录程序。
4.外部接口电路
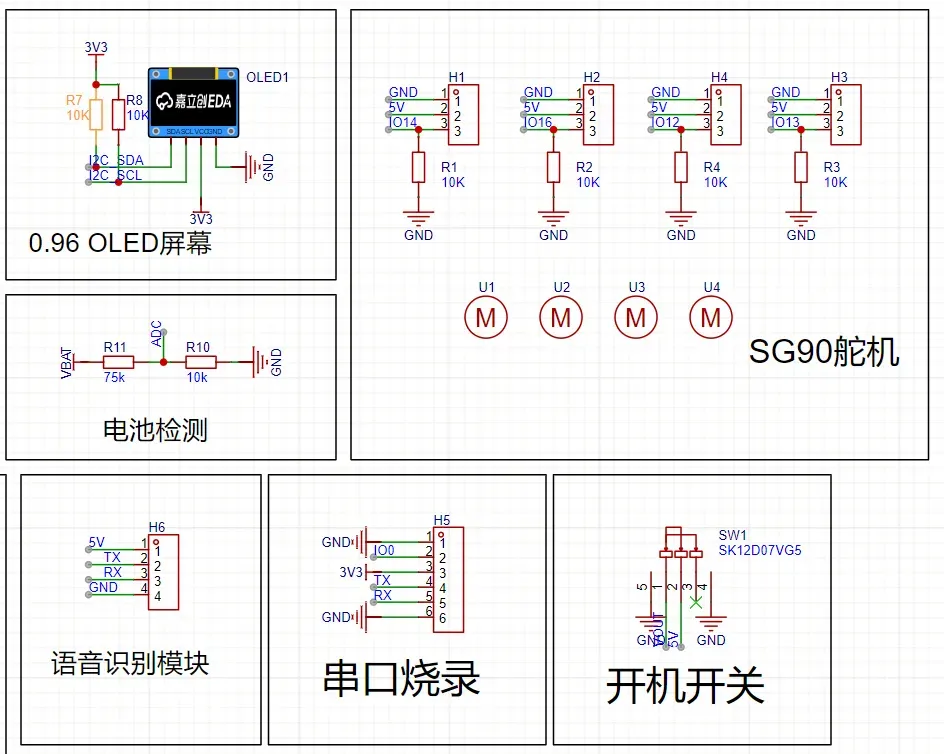
软件代码
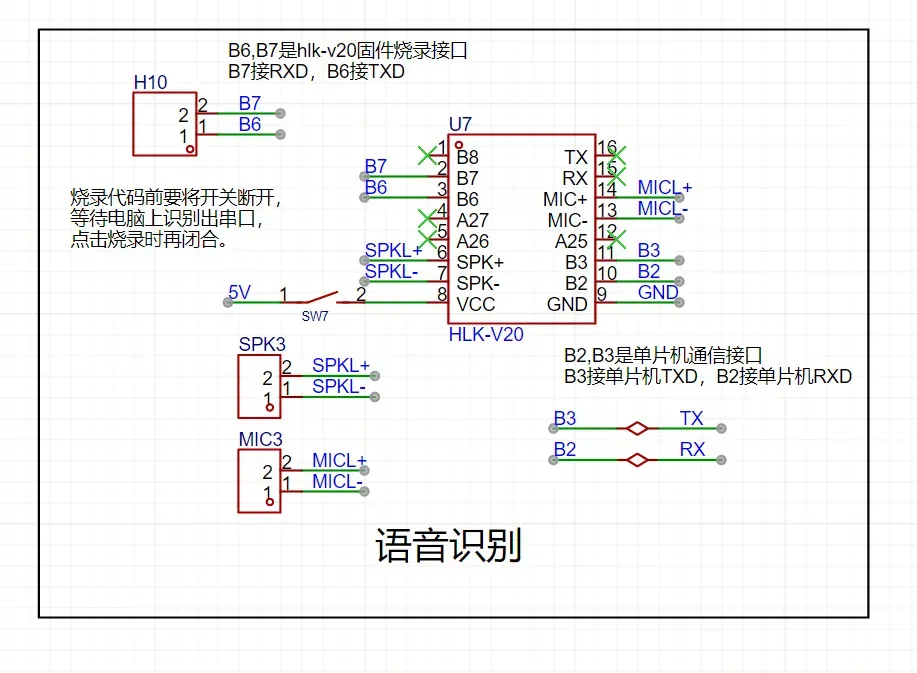
语音识别串口通信代码
void serialListen(){
//定义接收数据的数组
byte buffer[3] = {0};
if(Serial.readBytes(buffer,3)==3){// 从串口读取3个字节的数据,并检查是否成功读取了3个字节
for (int i = 0; i < sizeof(buffer); i++) {
Serial.printf("Buffer[%d]: 0x%02X\n", i, buffer[i]);
}
if(buffer[0]==0xAA && buffer[2] ==0x55){//判断是否为正确的帧头帧尾
Serial.println("ok2");
byte command = buffer[1];//获取命令
switch(command){
case 0x01:front(); //执行前进
emojiState = 1;
Serial.println("Front");
emojiState = 0;
break;
case 0x02:back(); //后退
emojiState = 1;
Serial.println("back");
emojiState = 0;
break;
case 0x03:left(); //左转
emojiState = 5;
Serial.println("Left");
emojiState = 0;
break;
case 0x04:right(); //右转
emojiState = 5;
Serial.println("Right");
emojiState = 0;
break;
case 0x05:sitdown(); //坐下
emojiState = 3;
Serial.println("sit down");
emojiState = 0;
break;
case 0x06:lie(); //趴下
emojiState = 6;
Serial.println("lie down");
emojiState = 0;
break;
case 0x07:toplefthand(); //抬左手
emojiState = 0;
Serial.println("top lefthand");
break;
case 0x08:toprighthand(); //抬右手
emojiState = 4;
Serial.println("top righthand");
emojiState = 0;
break;
case 0x09:dosleep(); //回收
emojiState = 2;
Serial.println("do sleep");
delay(100);
emojiState = 0;
break;
default:Serial.println("Unknown command");
break;
}
}
}
}
注意事项
- 语音固件创建与下载 https://lceda001.feishu.cn/docx/LQkZd74b7o8aEHxAGzbcGvHynle
- 语音识别串口的TX和RX要和主控的TX,RX交叉接线
组装流程
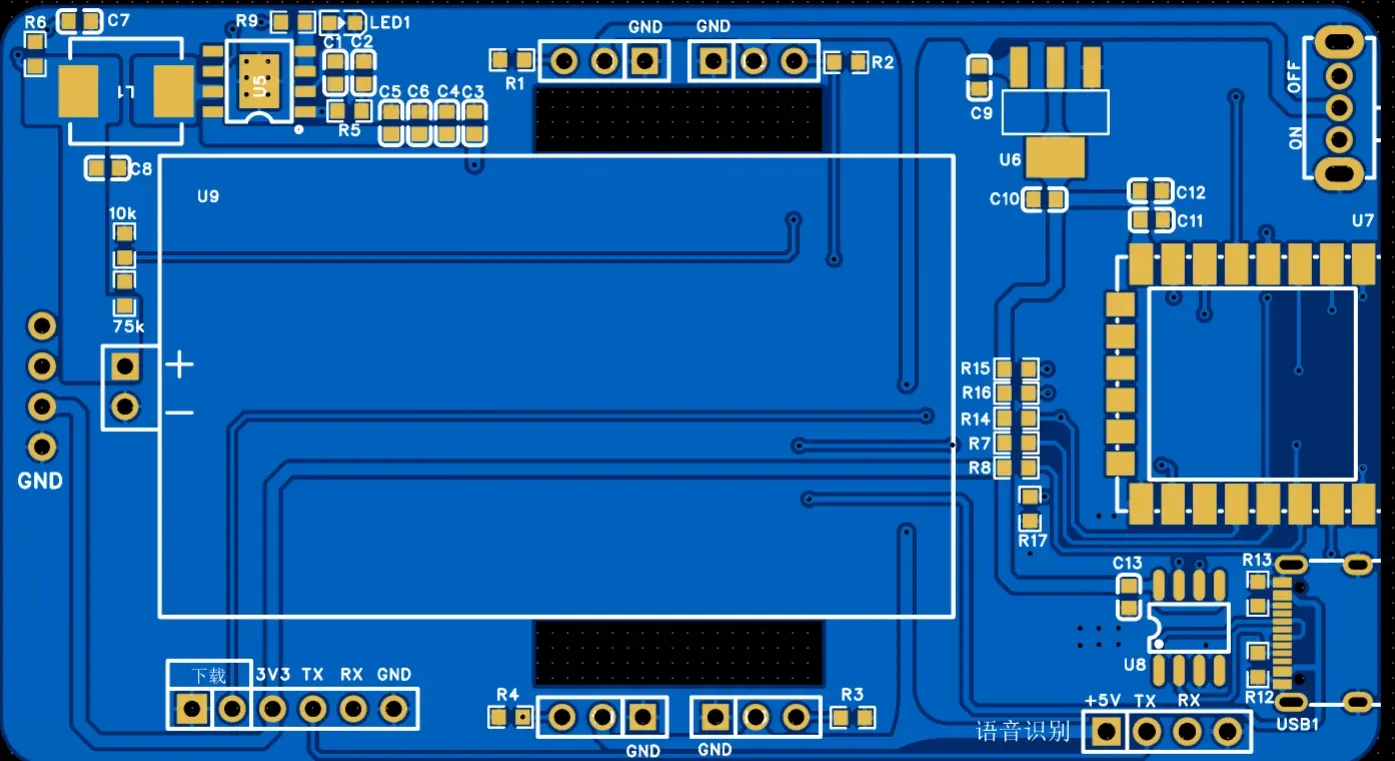
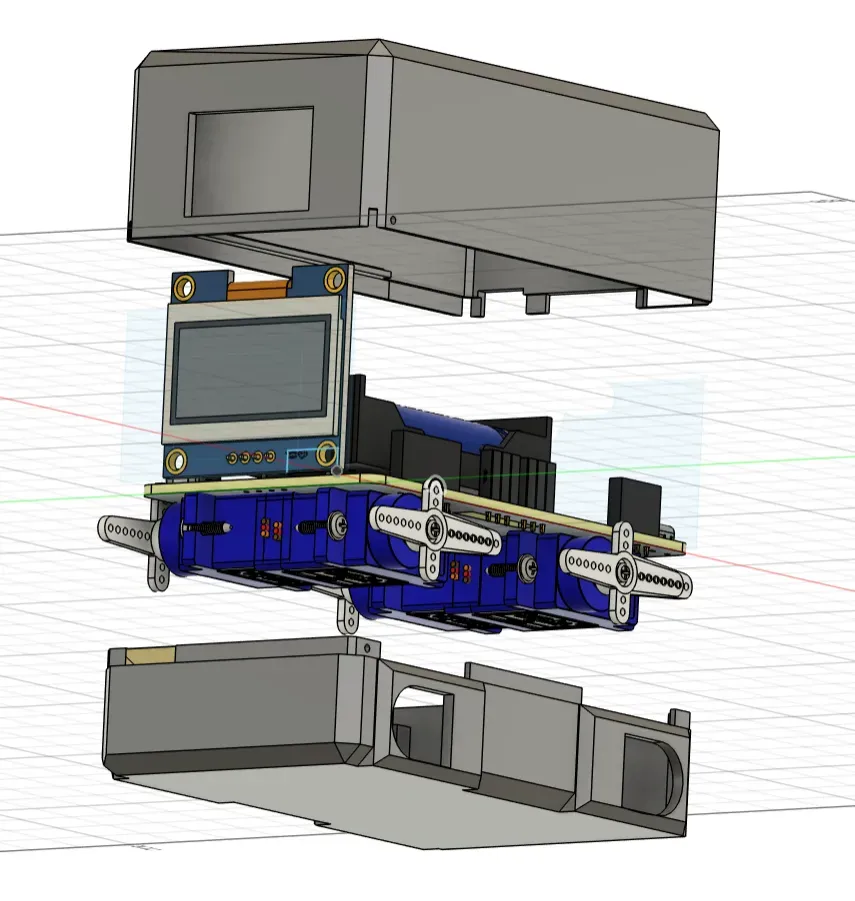
实物图

设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论