

KitKat SlimeVR PCB
简介
一个更适用于小白DIY SlimeVR的PCB走线板!
简介:一个更适用于小白DIY SlimeVR的PCB走线板!开源协议
:CERN Open Hardware License
描述
SlimeVR是什么?
SlimeVR是一组开放式硬件传感器和开源软件,有助于在虚拟现实中进行全身跟踪(FBT)。由于不需要基站,SlimeVR使无线VR FBT价格便宜且舒适。
它是如何工作的?
SlimeVR FBT在VR游戏和其他应用程序中提供简单,有效的身体和肢体跟踪。它通过利用高质量的惯性测量单元(IMU)传感器和与PC的Wi-Fi连接而不是电线,相机或基站,使全身跟踪变得舒适且价格更低。以下半身套装为例,五个跟踪器-每个大腿上一个,每个脚踝上一个,腰部有第五个跟踪器-足以完成工作。每个跟踪器都会监控自己在空间中的旋转,SlimeVR软件使用您的比例和耳机位置来计算关节角度并估计肢体位置。在更技术的术语中,SlimeVR依赖于绝对方向传感器,可配置的骨架模型和前向运动学。结果就像在身体的关键位置拥有虚拟Vive跟踪器一样。
KitKat相较于其他slimevr有什么区别?
我将所有需要焊接的地方都设计在了同一面,这样即使没有焊接基础的小白也可以轻松上手
kitkat使用MPU6500/6050+QMC5883L的方案,因为有了磁力计的加入相较于只使用6500/6050有很大的改善
kitkat的尺寸可以完美容纳下一块903090的电池,而且正因如此,它可能甚至不需要外壳..


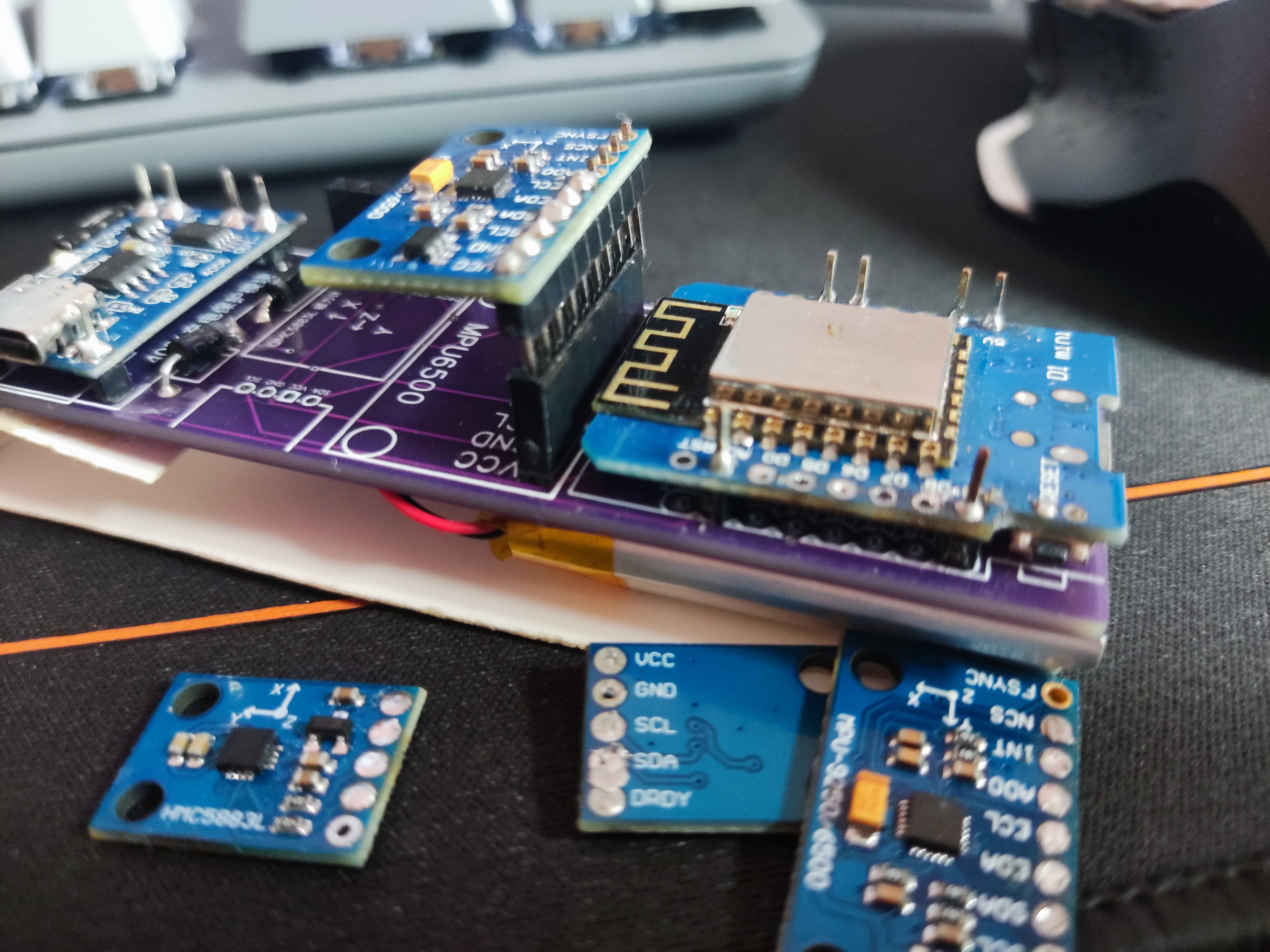
本追踪器需要用到的模块/元件
- D1 MINI
- MPU6500(6050也行,可能需要调整间距)
- QMC5883L(丝印HA5883)
- 1N5817二极管×2
- 180K电阻
- TP4056充电模块
- 12D19开关
- 3.7v电池(我用的903090)
- PH2.00座子(用于连接辅传感器,如果没需求可以不要)
- PH2.00连接线(用于连接辅传感器,如果没需求可以不要)
需要注意的地方:
- 焊接前一定要测试好模块是否正常,没错,这玩意儿存在坏件,建议先做一个测试板(传感器位置焊接排母),这样即使它是坏的只需要拔下来换上另一个继续测试就好,测试没问题再焊到板子上
- QMC5883L选择丝印HA5883的
- QMC5883L需要测试5分钟以上才能看出来是否正常,因为我有遇到过用着用着轴向变成反向的以及转向延迟的问题
- 部分商家可能会把MPU6800(0x74)当成MPU6500发货,这个是没法用的。请注意,MPU6500的地址是0X70,MPU6050的地址是0X68
- 电池不要买贵了

三块PCB的区别:
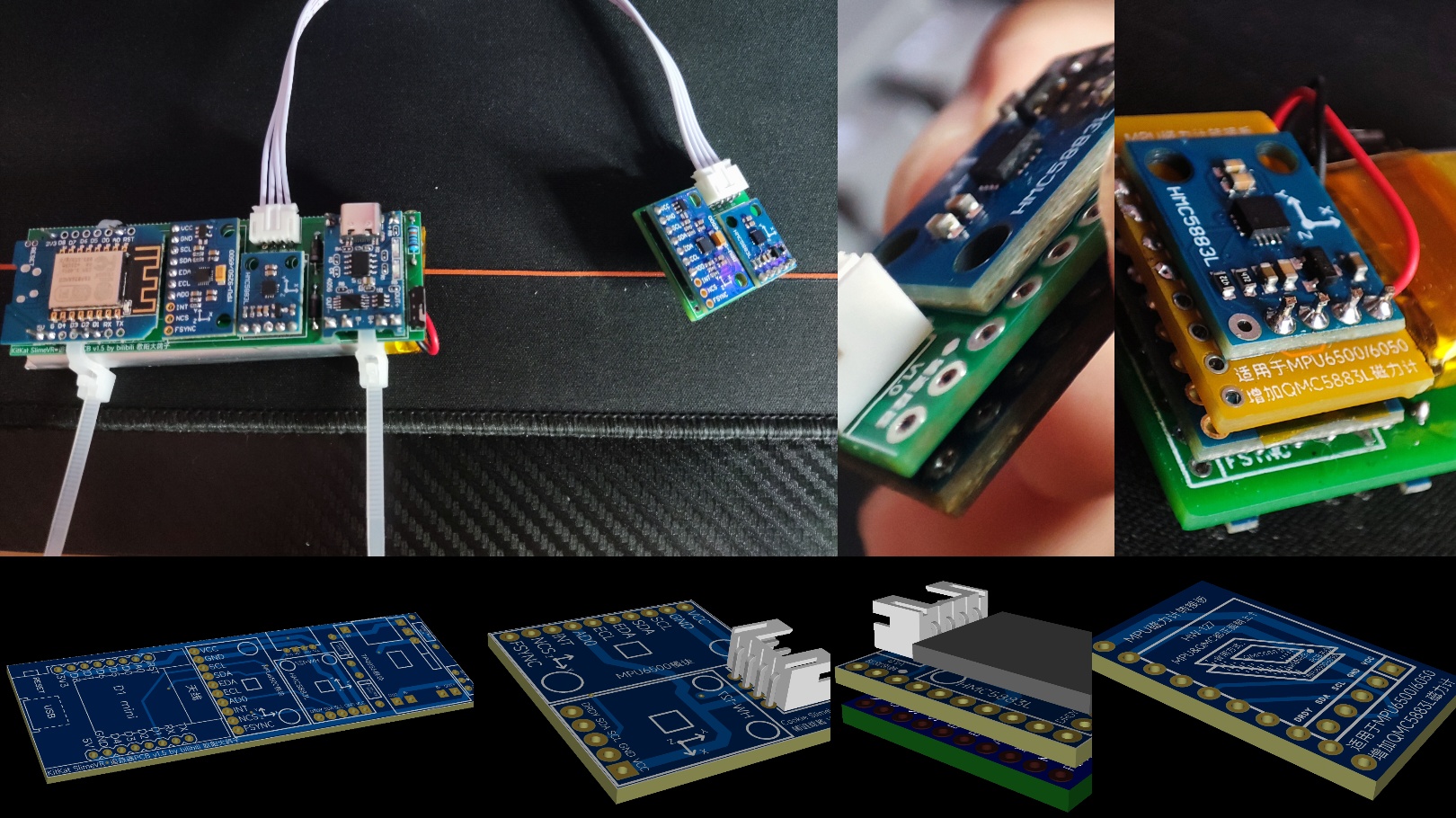 从左到右依次是kitkat主机、cookie辅追踪器、sandwich辅追踪器、sandwich转接板(可以给之前做好6500/6050的追踪器附加磁力计,不用此pcb你也可以直接飞线,详情参考原理图
从左到右依次是kitkat主机、cookie辅追踪器、sandwich辅追踪器、sandwich转接板(可以给之前做好6500/6050的追踪器附加磁力计,不用此pcb你也可以直接飞线,详情参考原理图
固件
在这里下载适用于轴对齐的版本
视频教程
BOM表
这个不用看..咱用的都是模块
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论