
TI训练营-简易PID项目
简介
能学到硬件到软件整个工程,开发板微控制器拥有多种通信接口,如UART、SPI、I2C等,能够轻松实现与各类外部设备的数据交互。
简介:能学到硬件到软件整个工程,开发板微控制器拥有多种通信接口,如UART、SPI、I2C等,能够轻松实现与各类外部设备的数据交互。开源协议
:GPL 3.0
描述
项目概述
本项目为嘉立创电赛TIA训练营中的简易PID(比例 - 积分 - 微分)控制项目。PID控制作为自动控制领域经典且应用广泛的控制算法,通过综合考量当前偏差(比例环节)、偏差的积分累积(积分环节)以及偏差的变化率(微分环节),实现对系统的精准调节。
项目目标
旨在打造一个简易且有效的PID控制系统,应用于[具体应用场景,如电机转速控制、温度控制等],在嘉立创电赛TIA训练营的平台上,通过软硬件结合的方式,完成对被控对象的稳定、精确控制,提升系统响应速度与抗干扰能力。
实现过程
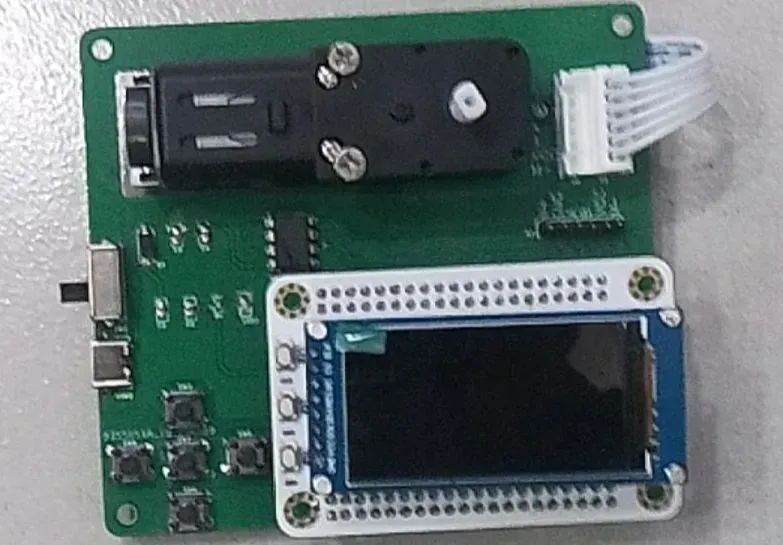
- 硬件搭建:选用 立创·天猛星 MSPM0G3507 开发板 作为控制核心,搭配编码器的电机,使用 PID 控制算法,用于实时采集被控对象状态信息,执行器编码器的电机用于接收控制信号并作出响应,搭建起完整的硬件系统。
- 软件编程:在软件开发层面,依据PID控制算法原理,编写控制程序。精确计算比例、积分、微分系数,通过不断调试优化参数,使PID控制器能根据传感器反馈数据,快速准确地输出控制信号,调节执行器工作状态。
项目成果
经测试,本简易PID项目在附件中,能够有效实现对被控对象的稳定控制,将控制精度显著提升,显著改善系统动态响应特性,缩短响应时间至[具体时间数值],具备良好的鲁棒性与抗干扰能力,达到了嘉立创电赛TIA训练营的预期目标,为相关实际工程应用提供了可借鉴的控制方案。
定速与定距功能说明
-
定速: 获取当前电机速度,然后根据设定的目标速度,让电机通过 PID 控制算法,使电机当前实时速度以最快的速度接近设定的目标速度。
-
定距: 根据电机旋转一圈的编码器脉冲数,确定电机旋转一圈为多少个 x 脉冲(x脉冲/圈),通过当前脉冲数和目标脉冲数,通过 PID 控制算法,使电机当前实时脉冲以最快的速度接近设定的目标脉冲,达到定距移动的效果。(简单来说就是让电机固定走多少步,走多了就退回,走少了就再走几步目在软件方面,使用裸机的方式编写驱动和逻辑,通过 轮询 + 中断 + 状态机 的架构完成项目。PID 部分不会大篇幅介绍背景、由来、模型等学术说明,将直接告诉你如何使用PID。最终可像 1 + 1 = 2 一样,直接将参数无脑带入公式,应用PID。
PID的无脑应用公式
PID_OUT = (Kp × 误差)+ (Ki × 累计误差)+(Kd × 误差间的差值))
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论