



专业版
VisionG_SE(RV1106)
9.4k
0
0
58
简介
廉价AI视觉模组,基于RV1106芯片,可部署yolov5、yolo11等模型,可用python快速开发。
简介:廉价AI视觉模组,基于RV1106芯片,可部署yolov5、yolo11等模型,可用python快速开发。复刻成本:¥80
开源协议
:CC BY-NC-SA 4.0
创建时间:2025-07-01 10:36:52更新时间:2026-03-16 15:13:16
描述
🚀 VisionG_SE - 基于 RV1106 的超高性价比 AI 视觉模组
本项目基于 RV1106 芯片设计,旨在提供一个极低成本(<80元)、高性能(内置NPU)且开发门槛较低的嵌入式视觉方案。不同于传统的 Linux 开发板,本项目提供了专属的 VSCode 插件和 Python 库,用于快速开发 Linux AI 视觉项目。
✨ 核心优势
1. 🛠️ 开发体验
为了解决 Linux 开发板配置繁琐的痛点,我开发了配套的插件和python库,用以降低使用门槛:
- 专属 Python 库 (
visiong.so):通过pybind11封装 C++ 底层,提供类似 OpenMV 的简洁 Python API。并移植了opencv-python及numpy库用以扩充函数库。 - 专属 VSCode 插件 (
vigide):
* 直接在 VSCode 扩展商店搜索vigide即可下载安装;又或者下载附件中的vsix文件,可在本地加载安装。
* 注:最新版 TI IDE (CCS) 也支持通过 .vsix 安装此插件。
2. 💰 极低的硬件成本
- 整机成本:整体 BOM 成本可控制在 80元以内。
- 极限压缩:如果选用海鲜市场的拆机芯片,成本可进一步降低。
- 兼容性设计:
* 尺寸:4.5cm * 3.6cm(仿 OpenMV 尺寸)。
* 元件:阻容采用 0603 封装,方便个人手工焊接(QFN 芯片仍需一定焊接水平)。
3. 🧠 AI 性能
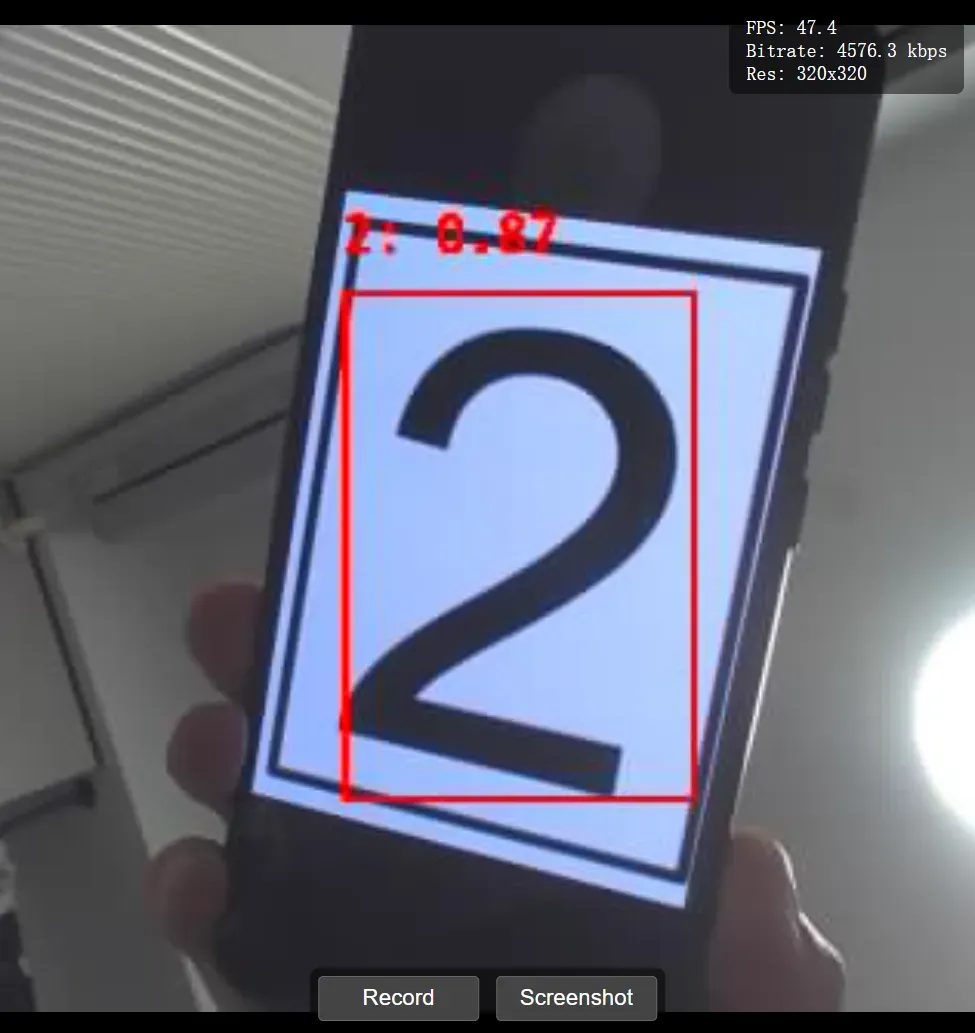
得益于 RV1106 的 NPU,本项目在运行深度学习模型时表现优异:
- YOLOv5s:输入分辨率
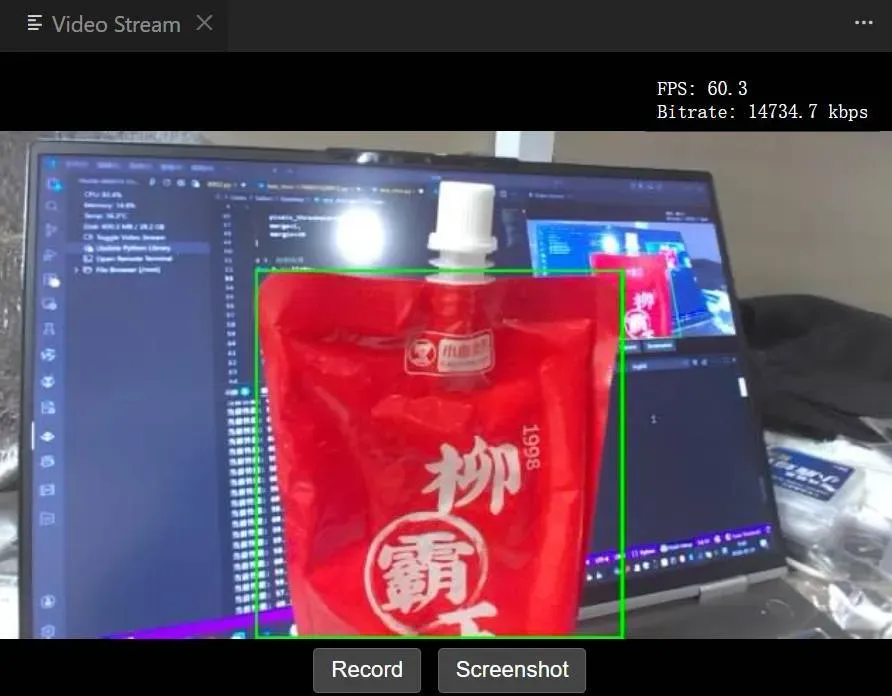
320*320,帧率 >40 FPS。 - HSV色块识别:分辨率
640*360,帧率 ~60 FPS。
⚙️ 硬件与制作说明
1. PCB 打样与焊接
- 阻抗要求:主PCB 下单时请选择 3313 层压结构 (+/- 20% 阻抗)。

- 基板选择:摄像头底板建议使用 铝基板,以辅助摄像头散热(下单时,直接导出,不测 DRC)。

- 美观要求:PCB版已在不惹眼的位置添加 JLC…… 标记,用以指定客编位置,下单时选择 已有位置。
- 芯片选择:
* 推荐使用 RV1106 G3 版本(内存更充裕)。
* 注:实际G2 版本性价比高(拆机芯片<10元)但内存紧张,在高分辨率图像下或许需使用 swap,可能导致帧率波动。
2. 摄像头选型
- 型号:适配立创商城 GC2093(与 Luckfox K230 同款)。
- 推荐:目前商城的三款均可使用,建议选择大镜头定焦版本,成像效果更好;自动对焦版本未经过系统化标定,对焦容易抽搐。
- 连接方式:采用底板作为连接件,参考同平台开源的openmv4plus 的连接方式。
3. 电源注意事项
-
VDD_0V9:如果考虑自行画板,建议给0.9V电源电路按2A标准设计,方便npu使用高频。
-
VCC_DDR:根据RV1106官方文档,采用1.35V电压(对应DDR3L)。
💻 软件与固件使用
1. 固件下载与烧录
- 固件版本:基于 Luckfox 5.10.160 修改,默认启用 UART4, I2C3, FB0。
- 下载链接:点击下载固件
- 烧录教程:参考 Luckfox Wiki Flash Image 章节。
2. 连接与配置
- 虚拟网口:烧录后连接电脑,务必将 RNDIS 虚拟网口 IP 配置为 172.32.0.100,否则无法通过 SSH 连接,参考 Luckfox Wiki 设置RNDIS 章节。
- SSH 信息:
* IP:172.32.0.70。
* 账号:root。
* 密码:visiong。
3. Python 开发环境
- 库安装:
* 由于官方缺乏 Python 适配,本项目使用pybind11绑定。
* 将visiong_python.zip,解压并上传至/usr/lib/python3.11/site-packages/。
* 或者直接使用 vigide 插件 的 "Update Python Library" 功能,选择visiong_python.zip直接上传即可,会自动解压。关于cv2.so和numpy.zip也是同理。 - 系统库替换:如果非最新固件,需替换
/oem/usr/lib下的librga.so和librknnmrt.so(最新固件可忽略)。
4. 开机自启
- 将
main.py放入/root文件夹。 - 使用插件设置,或手动将附件中的
S99python替换/etc/init.d/下的同名文件。 - Tip: 作为开机脚本时,建议注释掉
print语句以提升获取到的图传帧率(走的同一通道)。
📝 常见问题 (FAQ)
- Q: 自启动时,运行 rknn 例程报错?
* A: 脚本中的相关链接必须使用绝对路径,例如将./number2.rknn改为/root/number2.rknn。 - Q: 插件连接失败?
* A: 点击左侧栏齿轮图标,检查开发板的 IP、登录名和密码,同时是否检查是否已识别出开发板的RNDIS网口,是否已根据幸狐文档正确配置ip地址。

- Q: 在vigide中无法获取图像?
* A: 检查ip是否正确配置,同时注意电脑防火墙配置,在第一次弹出网络相关内容时,选择“公用网络”。 - Q: 如何设置python脚本开机自启?
* A: 将脚本命名为 main.py 直接放置在root文件夹下即可,注意将所有相对引用都改为绝对引用。
🤝 致谢与协议
- 开源协议:CC BY-NC-SA 4.0(允许个人少量焊接售卖,禁止店铺大规模商用)。
- 致谢:
* 感谢幸狐(Luckfox)官方的教程、SDK 及开源原理图。
* 感谢立创开源平台的 木马派 提供的硬件选型参考。 - 交流群:QQ群
1065320194 - 软件开源:
https://github.com/yiex/visiong
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









