

专业版
(常熟理工学院)指令智能小车|孤独的根号三
695
0
0
0
简介
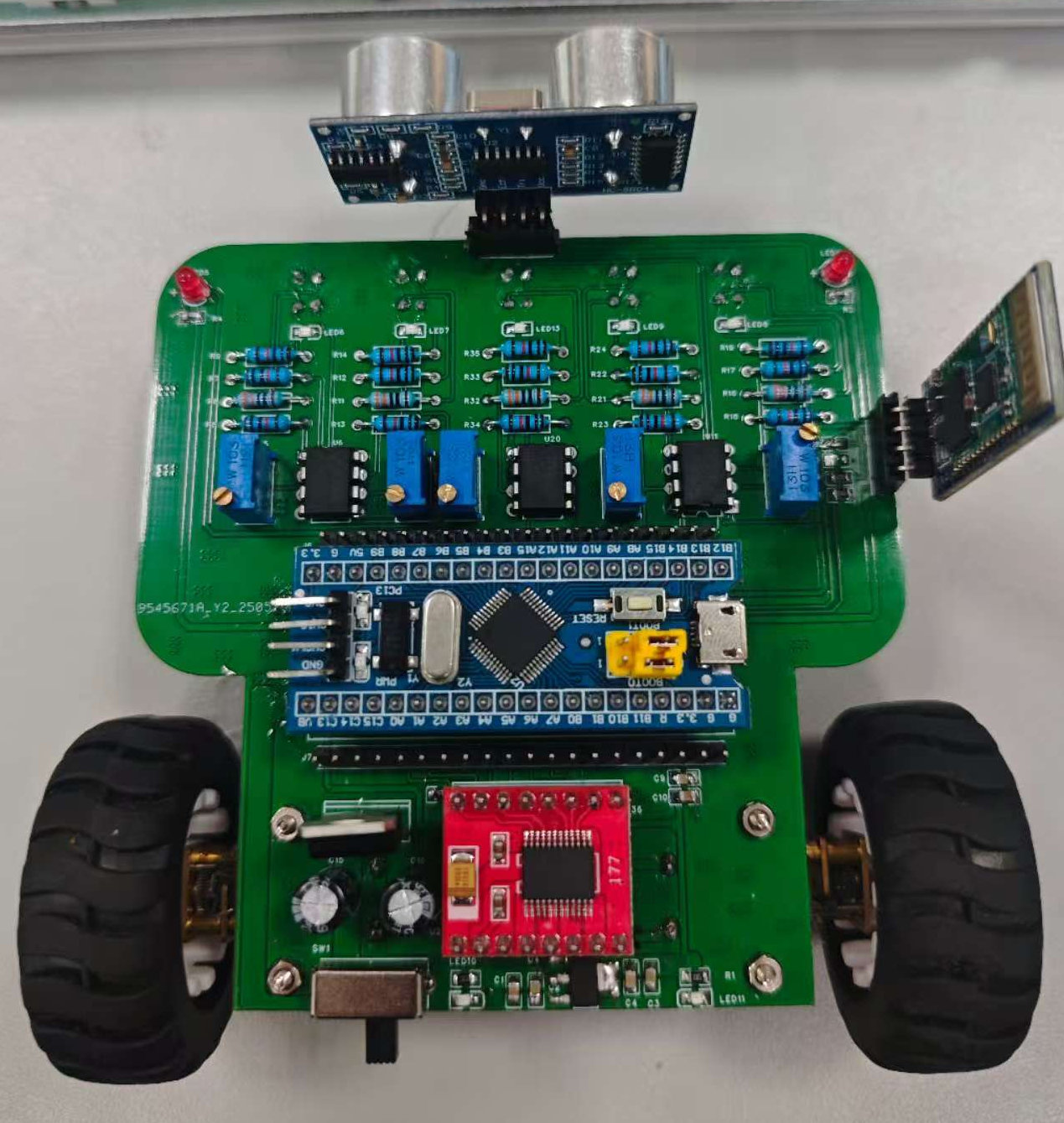
基于stm32f103c8t6的5路循迹,避障,遥控小车
简介:基于stm32f103c8t6的5路循迹,避障,遥控小车复刻成本:¥66
开源协议
:GPL 3.0
创建时间:2025-05-20 20:37:39更新时间:2025-07-04 09:24:36
描述
本项目获常熟理工学院大学生电子设计竞赛一等奖
队伍成员:李家祥、吴淼、钱顾悦
赛题的描述和说明
功能需求:
设计基于 STM32F103 主控的智能小车,实现遥控模式(接收用户指令控制运动)、五路灰度循迹(识别路径黑线,自主沿轨迹行驶)、超声波避障(检测前方障碍物)功能,要求模式切换流畅,适应简单室内场景(如赛道、办公区域模拟) 。
总体方案和设计思路
(1)系统架构
以 STM32F103C8T6 为控制核心,外接蓝牙模块(接收指令)、绘制五路灰度循迹电路(循迹信号采集)、HC - SR04 超声波模块(避障检测),搭配TB6612电机驱动模块 控制直流电机,实现运动控制。
以 STM32F103C8T6 为控制核心,外接蓝牙模块(接收指令)、绘制五路灰度循迹电路(循迹信号采集)、HC - SR04 超声波模块(避障检测),搭配TB6612电机驱动模块 控制直流电机,实现运动控制。
(2)设计思路
模式优先级:遥控模式为最高优先级,接收有效指令时直接响应;循迹模式与避障模式使用蓝牙遥控切换。
模式优先级:遥控模式为最高优先级,接收有效指令时直接响应;循迹模式与避障模式使用蓝牙遥控切换。
数据流转:传感器(灰度、超声波)实时采集数据,经 STM32 GPIO 读取,通过算法(如灰度阈值比较、超声波距离判断)处理后,输出 PWM 信号控制电机转速与方向,驱动小车动作。
每个模块的电路图和基本原理
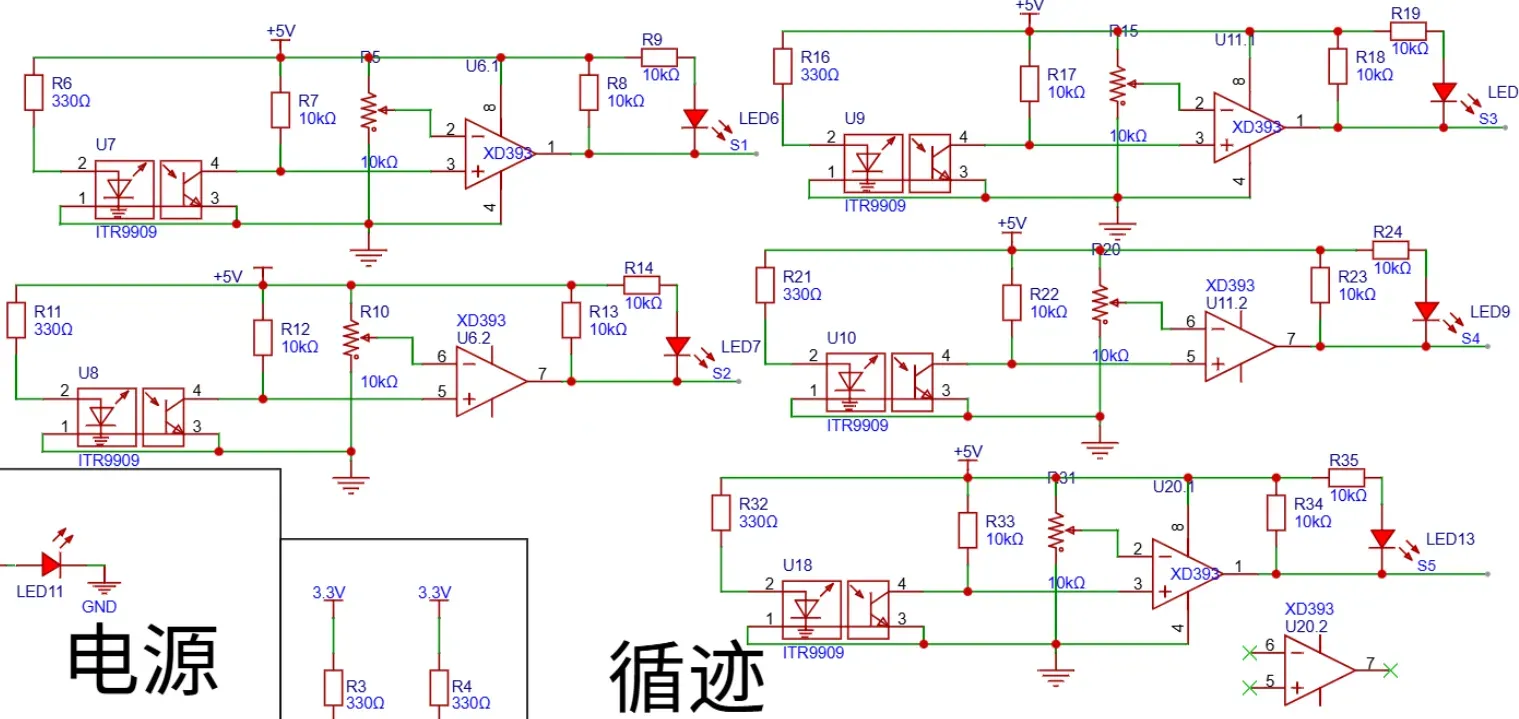
(1)五路灰度传感器模块
电路图:五路灰度传感器(如 TCRT5000 )并联,发射管发射红外光,接收管接收反射光(黑线反射弱、白色路面反射强 ),经比较器(或直接 ADC 采集)输出电压信号至 STM32 GPIO引脚。
原理:利用“黑线吸光、白区反光”特性,不同路面反射光强对应不同电压值,STM32 读取五路数据后,通过“差值比较法”判断小车偏移方向(如某路电压突变,判定偏向对应侧 ),输出纠偏指令。
电路图:五路灰度传感器(如 TCRT5000 )并联,发射管发射红外光,接收管接收反射光(黑线反射弱、白色路面反射强 ),经比较器(或直接 ADC 采集)输出电压信号至 STM32 GPIO引脚。
原理:利用“黑线吸光、白区反光”特性,不同路面反射光强对应不同电压值,STM32 读取五路数据后,通过“差值比较法”判断小车偏移方向(如某路电压突变,判定偏向对应侧 ),输出纠偏指令。
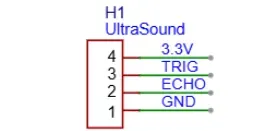
(2)超声波避障模块(HC - SR04)
电路图:HC - SR04 trig 引脚接 STM32 GPIO 输出,echo 引脚接 GPIO 输入,VCC 接 5V,GND 共地。
原理:STM32 向 trig 发送至少 10μs 高电平触发测距,模块自动发射 8 个 40kHz 超声波脉冲,遇障碍物反射后被接收,echo 输出高电平持续时间与距离成正比(距离 = 高电平时间×声速(340m/s)/2 ),STM32 捕获高电平时间计算距离,超出安全阈值(如 10cm )则触发避障动作。
电路图:HC - SR04 trig 引脚接 STM32 GPIO 输出,echo 引脚接 GPIO 输入,VCC 接 5V,GND 共地。
原理:STM32 向 trig 发送至少 10μs 高电平触发测距,模块自动发射 8 个 40kHz 超声波脉冲,遇障碍物反射后被接收,echo 输出高电平持续时间与距离成正比(距离 = 高电平时间×声速(340m/s)/2 ),STM32 捕获高电平时间计算距离,超出安全阈值(如 10cm )则触发避障动作。
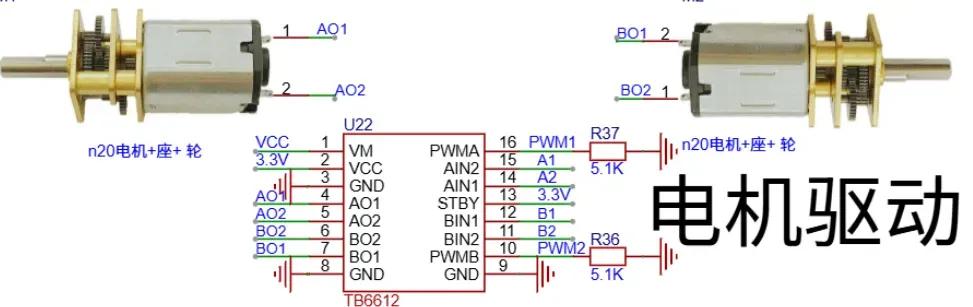
(3)TB6612 电机驱动模块
电路图:TB6612 VCC 接 5V,VM 接电机电源(如 7.4V 锂电池 ),AO1、AO2、BO1、BO2 接电机,IN1 - IN4 接 STM32 GPIO 控制方向,PWM1、PWM2 接 STM32 PWM 输出控制转速,GND 共地。
电路图:TB6612 VCC 接 5V,VM 接电机电源(如 7.4V 锂电池 ),AO1、AO2、BO1、BO2 接电机,IN1 - IN4 接 STM32 GPIO 控制方向,PWM1、PWM2 接 STM32 PWM 输出控制转速,GND 共地。
原理:PWM 占空比调节电机转速(占空比越大,转速越高 ),GPIO 高低电平组合(如 IN1 = 1、IN2 = 0 控制电机正转 )控制电机转向,实现小车前进、后退、转向。
(4)供电模块
供电使用2节3.7伏锂电池,通过降压芯片降到5v,不过推荐降到5v用AMS1117-5v,我用的这个容易烧,然后又接了一个降到3.3v的稳压芯片,驱动的话用的是tb6612蓝牙驱动2路电机,蓝牙用的5v供电,信号线做了分压,保护单片机,5路循迹,还有超声波可以实现避障,由于设计原因,注意左边的电机上面垫高了一点与电容分开,不然电流会流向电机外壳。
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









