


专业版
柯南同款, 全自研高速电动滑板开源!
1.6w
0
0
30
简介
使用STM32F103制作一个无线控制的电动滑板,载人工况下最大时速可达40km/h,续航25km左右。
简介:使用STM32F103制作一个无线控制的电动滑板,载人工况下最大时速可达40km/h,续航25km左右。开源协议
:GPL 3.0
(未经作者授权,禁止转载)创建时间:2025-12-03 22:08:16更新时间:2025-12-07 20:44:39
描述
bilibili有该项目的视频介绍:
https://www.bilibili.com/video/BV1cr2sBsEsF/
(如果视频播放多,会出详细的各个模块设计教学,感谢大家多多支持我的B站)
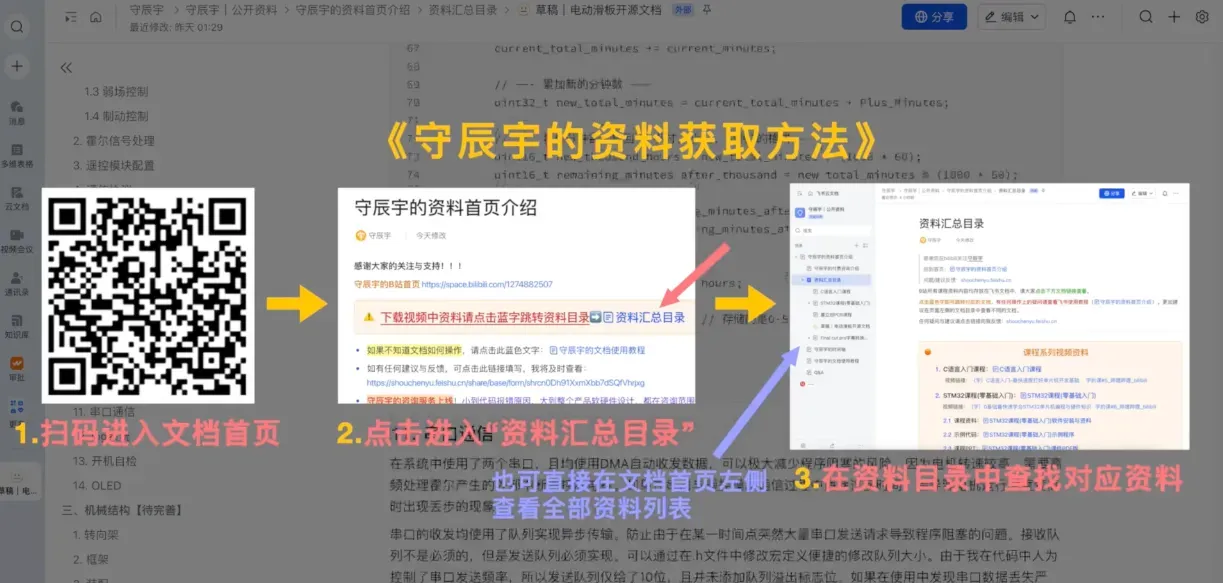
这个项目包括软件和硬件全套的开源资料,更多细节可以在我的飞书文档主页中查看详细介绍《电动滑板开源文档》:
https://shouchenyu.feishu.cn/wiki/PxnSwaRRRixkaokr8oBcpYotnyb
项目简介
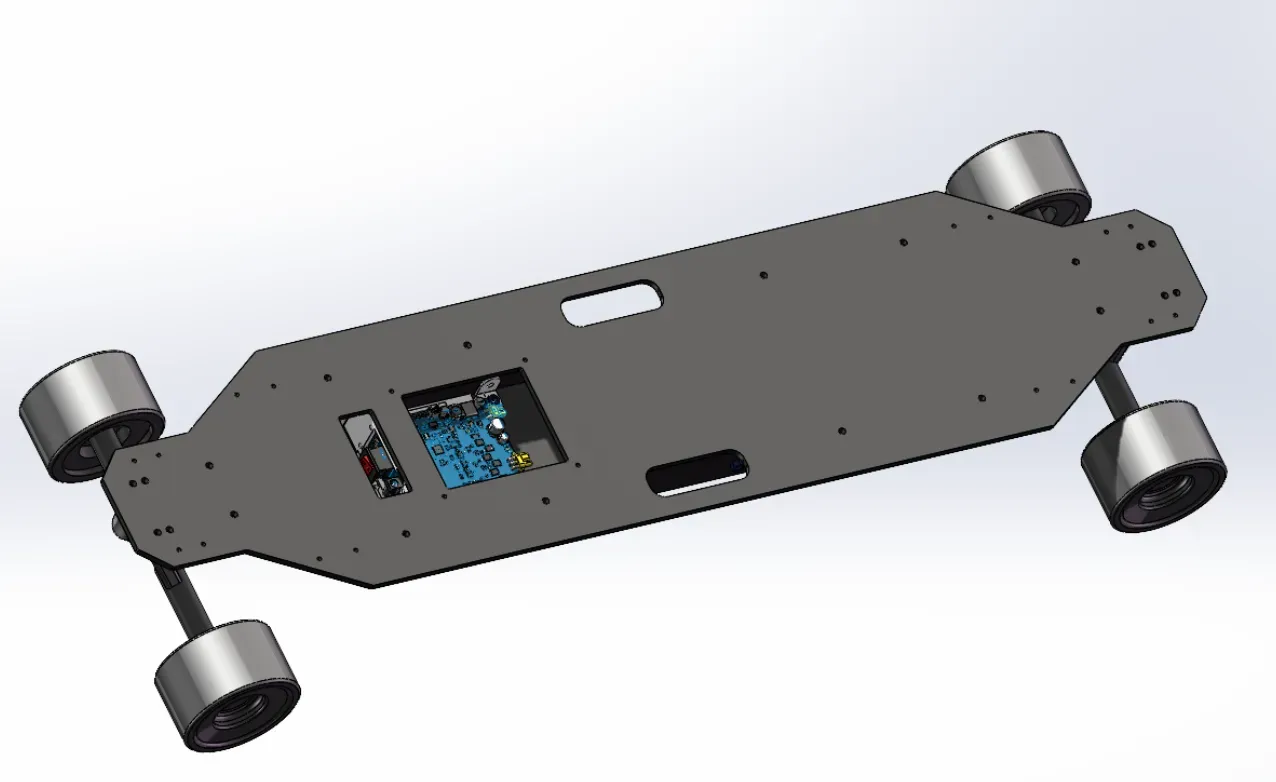
该项目制作了一个无线控制的电动滑板,载人工况下最大时速可达40km/h,续航25km左右。该项目开源资料中包括滑板的硬件电路设计、软件代码设计、机械结构工程。
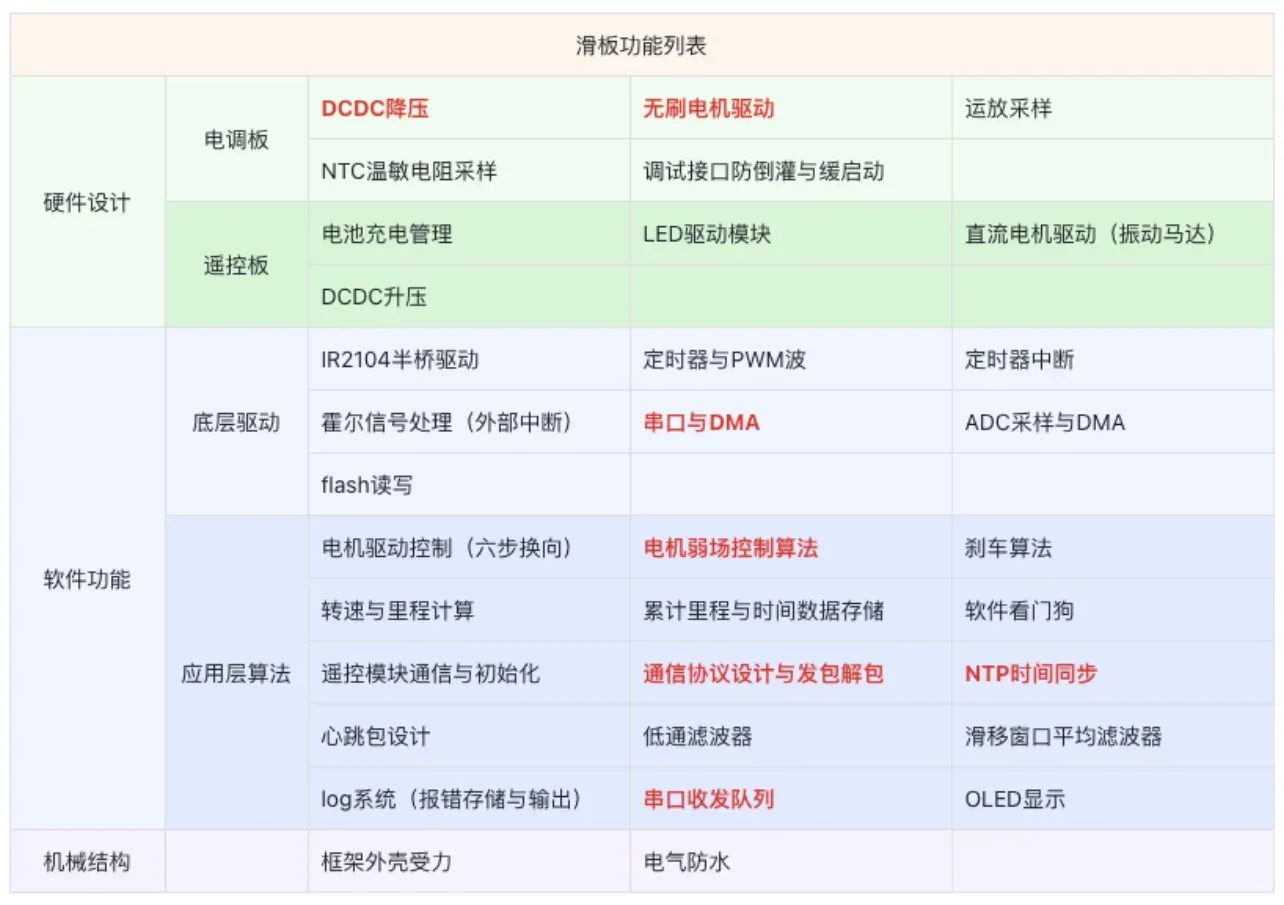
整个系统主要分为两个部分:滑板、遥控器。滑板在使用时,通过遥控器控制滑板的动力,转向通过人在滑板上的重心转移实现,与普通滑板原理一样。遥控器上有显示屏可以查看当前滑板状态、电池电压、温度、速度、累计里程与运行时间。通过摇杆前后推移实现加速和刹车的控制,两个按钮靠近摇杆的一个可以切换动力模式,另一个预留。

滑板的主控板为电调板。电调板实现了滑板的全部控制,包括:无刷电机驱动、转速采集、遥控通信、电流电压温度采样等。在滑板中有一块分电板,用于便捷的更换保险丝、断电、充电。电调板支持24V-42V宽电压输入范围,仅需在代码中修改低电量判断参数即可,最大稳定驱动电流12A。
滑板和遥控器的软件功能较多。主要实现的了滑板与遥控之间的可靠双向通信,同时代码结构便于自行增加新功能。代码均未使用rtos,嵌入式软件基础较差的同学也能够理解代码逻辑。
滑板机械结构主要使用碳纤维板cnc加工后作为滑板主要框架,并作为防水防尘的外壳。内部电气设备使用3D打印件进行固定。遥控器使用3D打印外壳进行简单固定。

一、硬件
滑板的硬件分为3块PCB,电调板(滑板的主控板)、遥控板(用于控制滑板运行)、分电板(固定滑板电源总开关、充电接口、保险丝)。
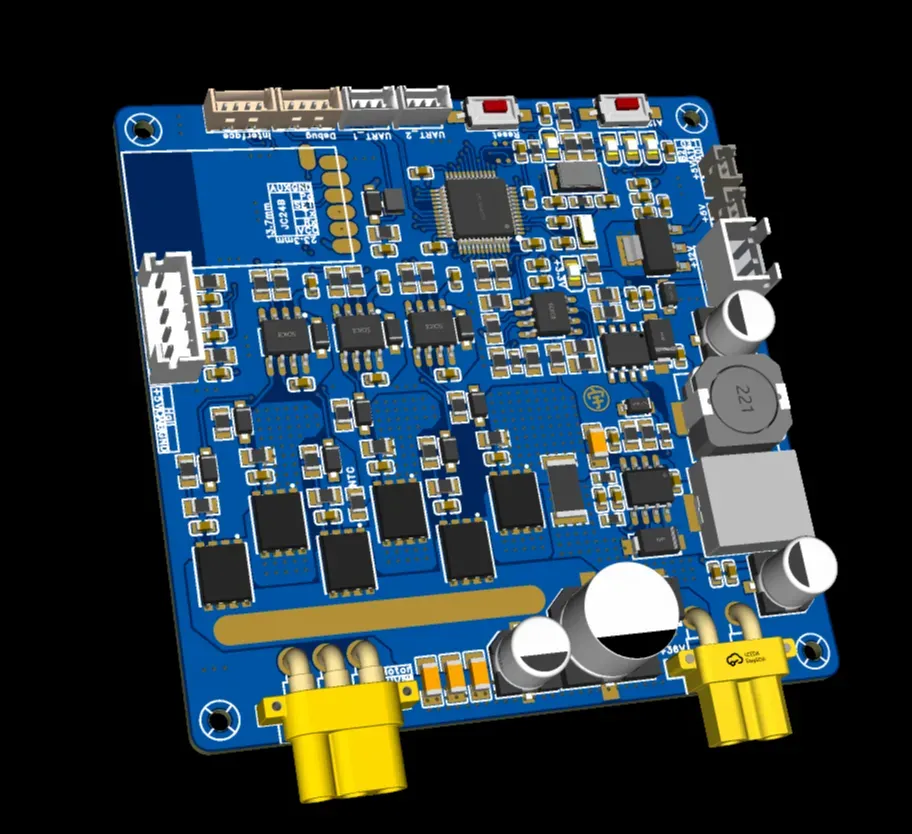
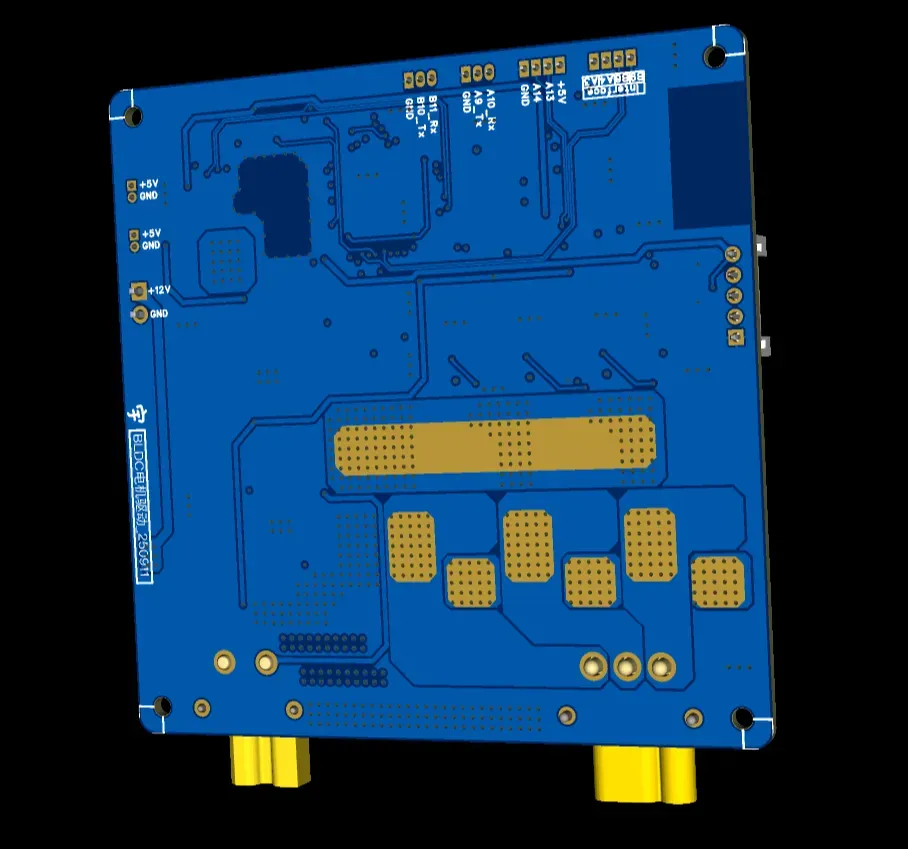
电调板
电调板包括了滑板无刷电机控制,降压,遥控模块,以及安全的调试接口。
焊接时请使用加热台,因为该PCB设计时为了追求较高的MOS管与降压芯片散热效率,若使用热风枪焊接,容易导致MOS管底部焊锡融化不彻底导致虚焊。有时虚焊不会导致万用表测量不通,而是会导致大电流时发热严重。焊接使用的锡膏请选择融化温度较高的(建议183度以上),以避免MOS管运行发热后元件脱焊的问题。
PCB底面MOS管对应的位置有阻焊开窗,目的是为了让散热器与PCB之间导热效率更高,利于PCB散热。同时需要注意绝缘,千万不能将相邻开窗位置短路,否则会导致MOS管烧毁。使用时需要利用PCB上预留的螺丝孔将PCB架起悬空,以避免接触到导体短路。
-
降压
由于动力电池输入电压最大可到43V,所以36-12V降压选择耐压较高的芯片。5V降压所需功率不高且电压稳定,选择外围电路更简单的芯片。在36V网络必须放置TVS二极管(下图中D17),因为电机在运行时存在较高的反电动势,尤其是在滑行刹车的瞬间尤其明显(电机滑行发电产生电压会通过MOS管的寄生二极管倒灌,导致+36V网络电压瞬间升高),为了保护元件,必须使用TVS二极管。在12V网络和5V网络放置了稳压二极管确保电平安全性。36V的几个电容只需要选择耐压50V的即可,目前测试电容不会烧毁,反而是耐压60V的降压芯片会有概率损坏,所以TVS二极管击穿电压只需要小于60V即可,因为截止电压大于43V且击穿电压小于50V的TVS二极管还没问世。
布线时,在芯片底部应当放置过孔与底面大面积的GND铜箔相连,有利于芯片散热。芯片到电感的电流路径应当尽量短,减少波动对其他网络的串扰。
焊接后,需要先用万用表检查各电源网络是否短路,然后再上电,否则可能导致严重的短路,具有一定危险性,尤其是连接动力电池供电时。首次使用动力电池供电时,应当时刻关注降压芯片发热情况,防止芯片损坏。
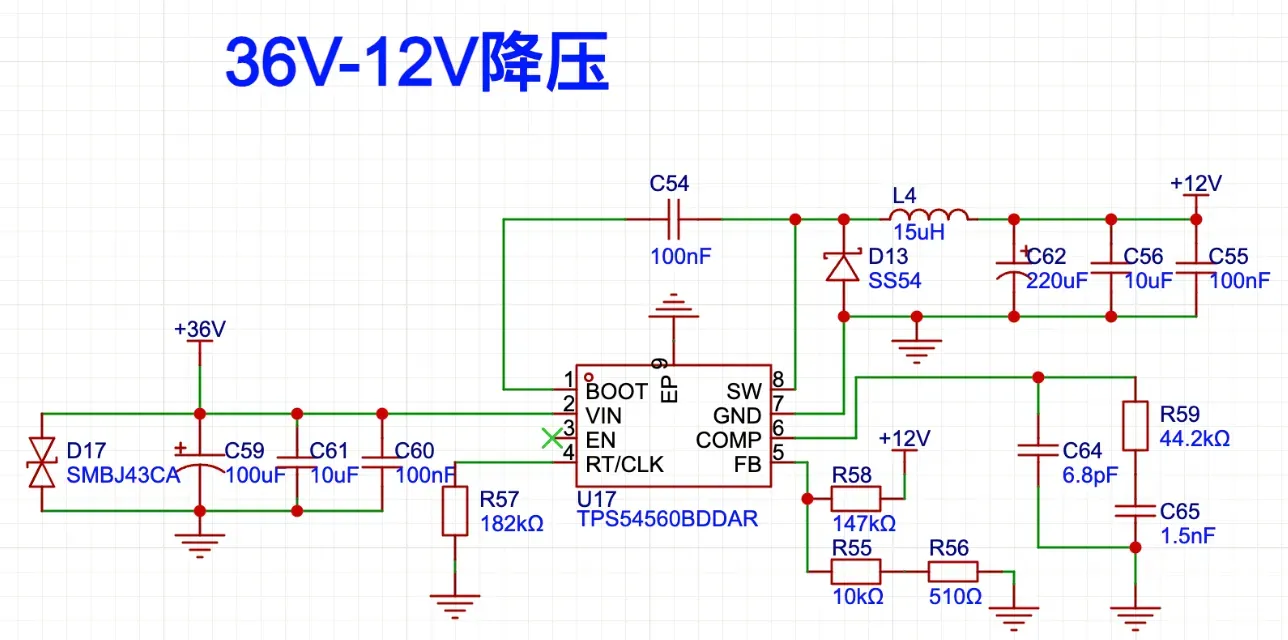
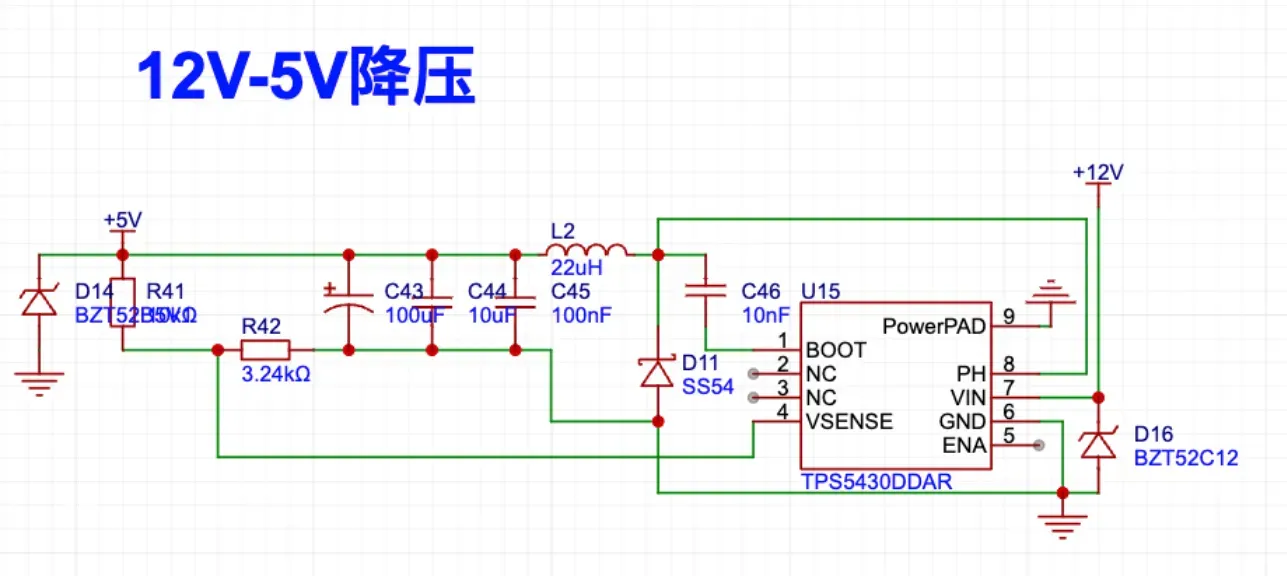
在使用时,注意手不能触摸36-12V降压附近的电容,有一个6.8pF电容非常小,手触摸会导致容值改变,电压波动。
12V接口最大输出电流为5A,5V接口最大输出电流为3A。可用于外接设备的供电。
-
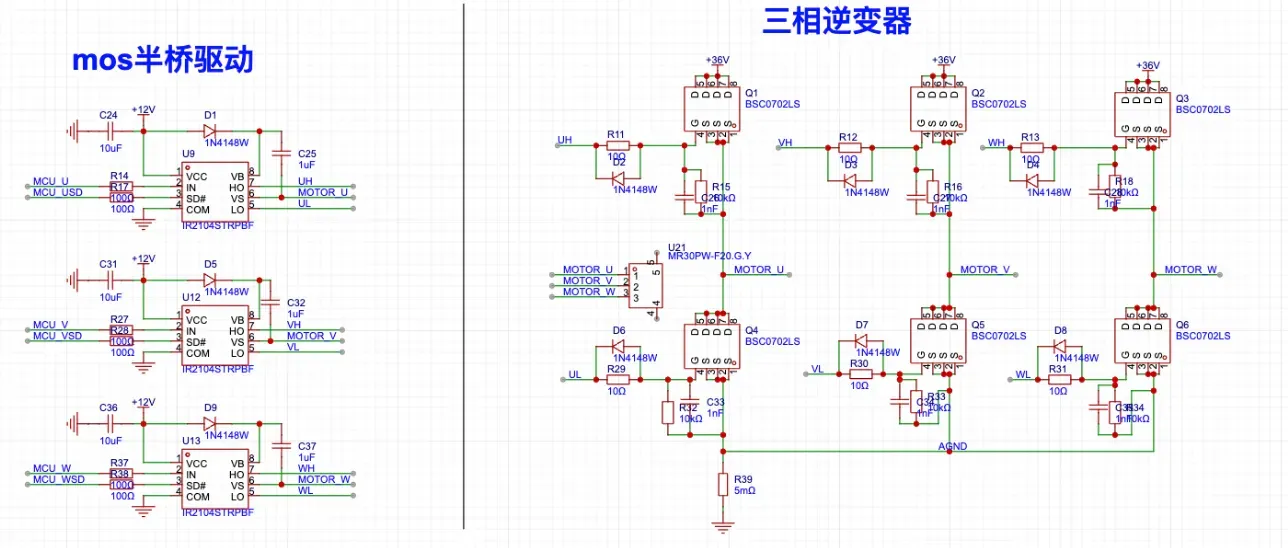
电机驱动
电机驱动采用了三个IR2104半桥芯片进行控制,然后再连接六个mos管实现逆变。IR2104芯片有一个自举电容,这个电容对耐压要求较高,需要注意。
+36V和GND网络之间要加电容以滤除电机驱动产生的电平波动,需要注意电容需要电解电容与陶瓷电容搭配,否则会导致电解电容发热严重或mos管发热严重。电容值不能随意更改,否则可能会导致mos管发热更加严重。
布线需要注意,在+36V网络中,需要将电容布置在接口到驱动mos管中间,因为需要将驱动电机产生的电压波动给滤除。且陶瓷电容要靠近mos放置,电解电容远离mos放置,以便陶瓷电容吸收高频杂波,防止电解电容发热严重。功率网络需要加宽PCB布线,以便承担较大的电流,在布线上进行阻焊开窗并在开窗处上锡可以进一步增加载流能力。在mos管下方的电机UVW网络以及+36V网络,由于其连接了mos管的散热,所以布线面积要尽量大,以增强mos管散热能力。
首次测试功率电机功率回路时,要时刻关注mos管发热情况,防止危险情况。
-
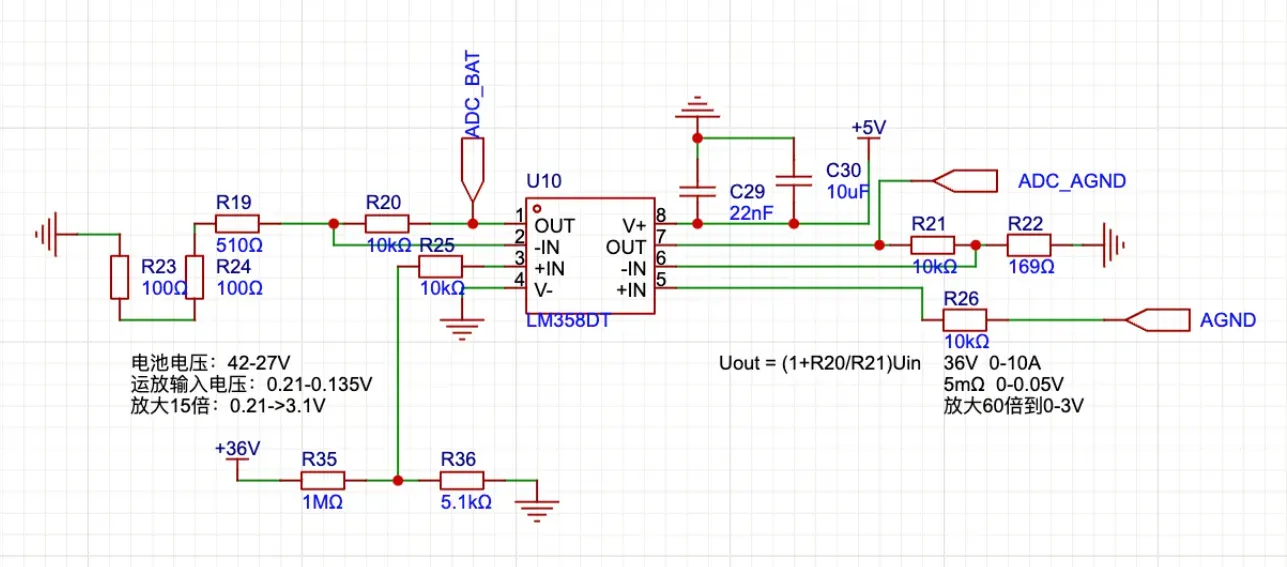
运放采样
运放电路主要实现电池电压的采样与电机电流采样。具体计算与放大倍数在下图中有详细列举。需要注意运放芯片需要选择轨到轨的芯片,否则可能导致采样范围缩小,软件在使用数据时发生错误。
-
温度采样
mos管中间放置一个NTC温敏电阻以获取mos管温度,实现超温保护。NTC应当尽可能紧贴mos放置,以便能够快速准确的读取温度信息。布线时,应将电容放在NTC电阻到MCU引脚中间,以滤除mos开关对NTC电阻网络的串扰。
-
霍尔信号接口
霍尔信号接口使用了上拉电阻和滤波电容确保信号稳定。
布线需要注意霍尔信号线应当尽可能远离电机功率电路,不能从其下方穿过,否则会导致信号非常不稳定,导致软件中获取转速信息失败。
接口使用了PH2.0接口,与电机使用的霍尔接口与线序相同,无需再转换接口。如果使用其他电机,需要重新确认霍尔信号与电机UVW三相的对应关系。
-
调试接口防倒灌与缓启动
由于电调板上有12-5V降压电路,故使用动力电池供电时,5V网络已有供电。此时通过Debug接口连接电脑时,有可能出现电调板通过调试器向电脑供电的情况,导致调试器损坏,所以使用一个二极管防止5V供电倒灌。
电调板上5V网络电容较大,当调试器首次连接时瞬间电流较大,导致调试器过流保护,需要在2s内重新插拔电脑与调试器以重新启动。现在使用一个电感与RC缓冲电路实现缓启动,防止调试器过流保护。
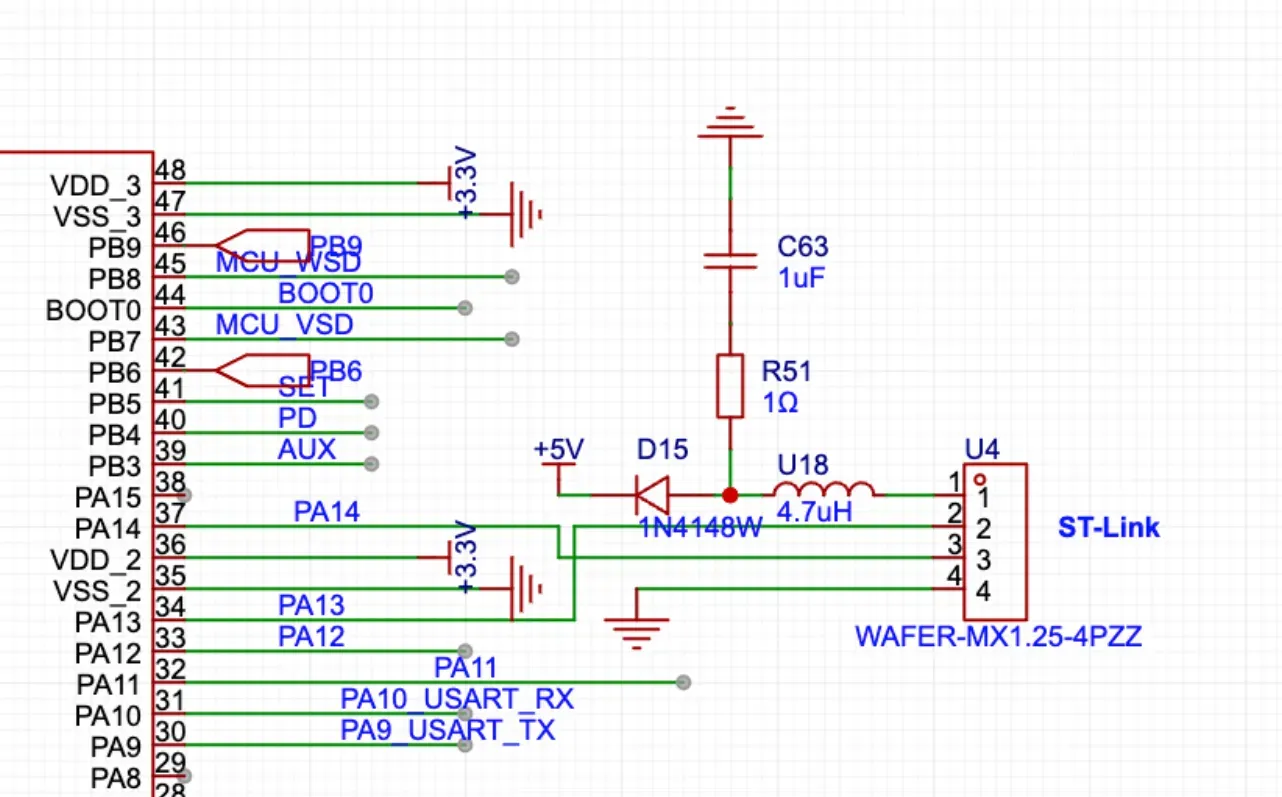
目前存在一个小问题,当5V外部供电接口连接了散热风扇后,由于风扇消耗电流较大,可能导致调试器供电的5V电压不稳定,现象是PCB上的LED电量时不稳定,如果出现此问题,将电调板动力电池供电打开即可,debug接口有防倒灌设计,不会烧毁调试器或电脑USB接口。但是调试时需要注意防止代码有错误,导致下载后立刻疯车。
-
安装注意事项
-
电机线缆干扰遥控通信
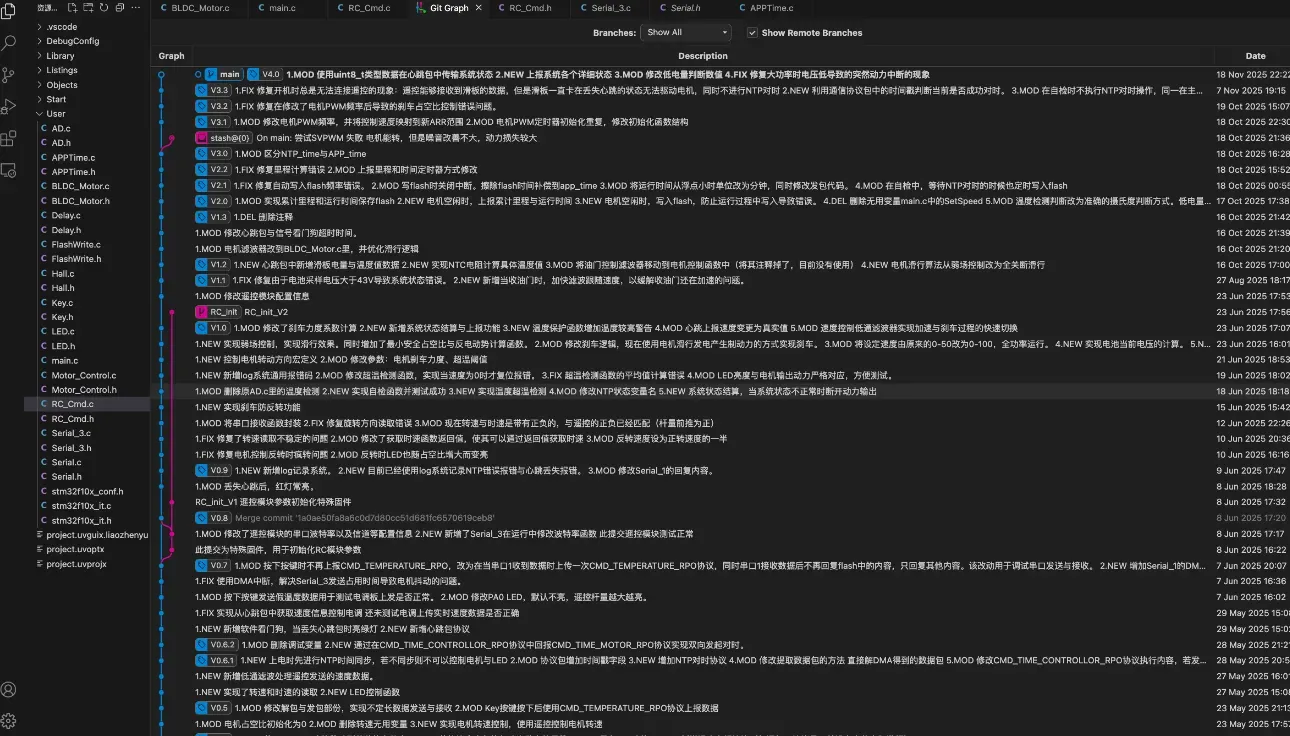
在安装时,要注意电机线缆不能从PCB下方穿过,而应该从PCB边上绕过。因为从下方穿过非常容易干扰PCB的信号,导致MCU与遥控模块之间的串口通信异常。当发现遥控信号经常断连不一定是无线通信被干扰,也有可能是MCU与遥控模块之间的串口信号被干扰。
经过测试,如果电机线从PCB下方穿过,在高速或上坡这种大功率工况,滑板动力会中断。此时由于串口被干扰,滑板的系统状态也不能及时发送到遥控模块,所以在遥控板上也无法查看到滑板下行离线的警告。需要通过log系统在发生动力中断的现象后,使用电调板上的串口连接电脑查看log日志从而判断电调板是否有心跳丢失的现象。
为什么电机的干扰不会影响2.4G无线通信反而会影响串口?因为电机使用了30kHz的PWM驱动,而115200波特率的串口信号频率最高相当于57kHz信号,频率接近的信号更容易耦合,从而被干扰。2.4GHz频率远大于30kHz,所以电机的干扰几乎不会影响无线信号。
-
注意绝缘与防潮
由于碳板并非完全绝缘,所以PCB不能直接放置在碳板上,建议使用3D打印件将其悬空架起,防止接触碳板短路。同时在MOS管的背面有阻焊开窗用于加强散热,当在背面粘贴散热块时,需要注意不要让金属直接接触PCB,防止短路。
如果夏天天气潮湿,需要将电调板进行简单防潮处理,比如将晶振的22pF电容和36V-12V降压的6.8pF电容用硅橡胶或热熔胶封住,防止高湿度环境导致容值改变,硬件稳定性下降。
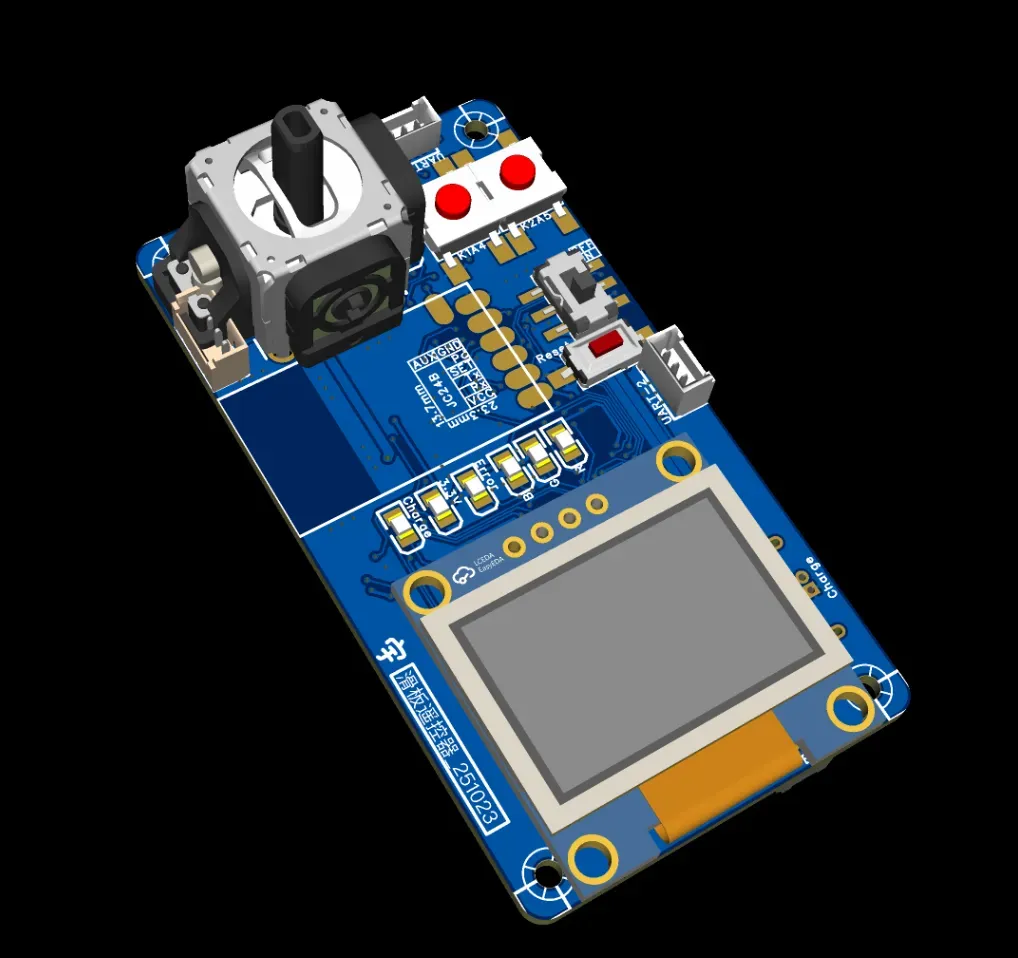
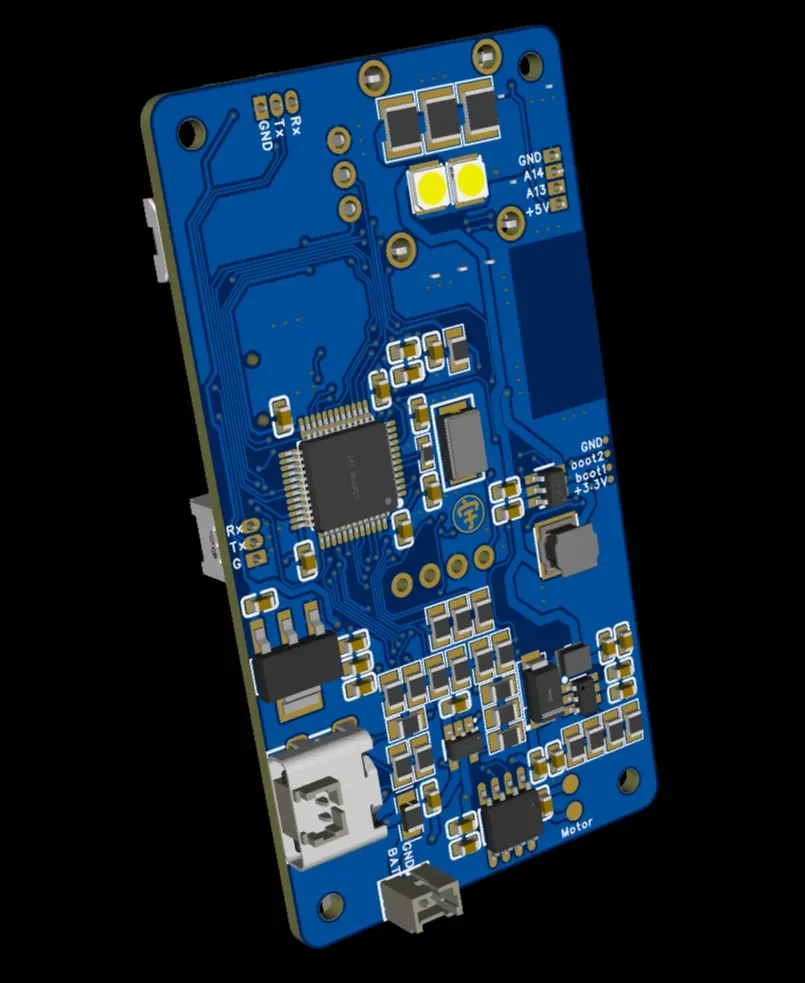
遥控板
-
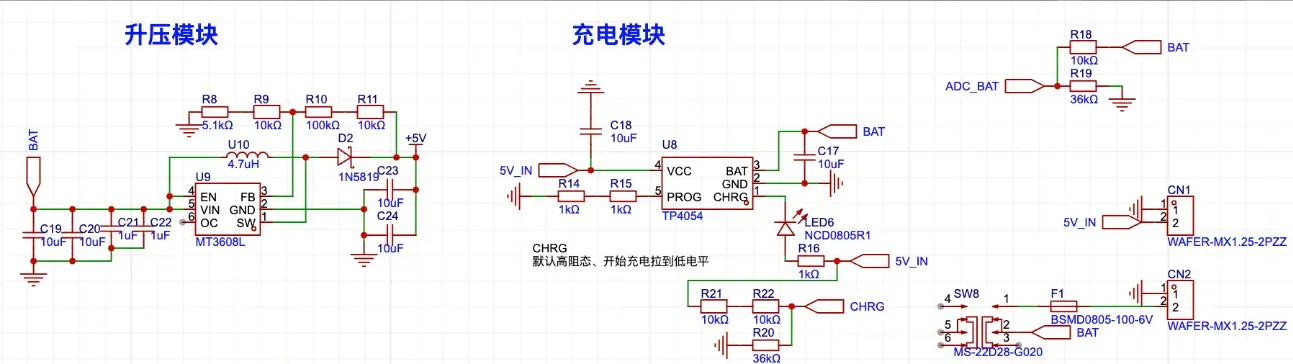
电池管理
在遥控板的电池充放电电路中,不仅使用了充电模块控制芯片充电,也使用了一个升压模块,以保证在电池电压低于3.3V左右后,仍然能给MCU供电。实测电池电压大于2.6V都是可以正常给遥控板供电的。
由于电池拨动开关连接在充电模块与电池之间,所以当电池充电时必须将电源开关打开,否则电池是无法充电的。并且目前在电池拨动开关未打开的情况下,遥控器会点亮充电指示灯也会点亮,但是此时实际上是无法给电池充电的,需要注意必须将电池拨动开关打开才能给电池充电。在充电时可以通过CHRG网络连接的MCU引脚判断当前正在充电,从而让遥控进入充电模式,禁用遥控功能。目前代码中没有实现该功能,如有需要可以自行添加。建议后续将充电模块改到电池拨动开关之前,解决必须要打开电池拨动开关才能正常给电池充电的问题。
-
摇杆与按键
按键使用100nF电容消抖。摇杆本质上是一个电位器,直接使用单向摇杆电位器即可。注意PCB的封装大小与实际要对应。
摇杆在使用时需要区分10K欧与5K欧的电位器。这两个摇杆不能通用,因为采样得到的零点电压会有变化,导致摇杆归零时电机不一定停止,需要在代码中修改死区大小与零点偏移量实现正确的控制。需要具体修改代码。
-
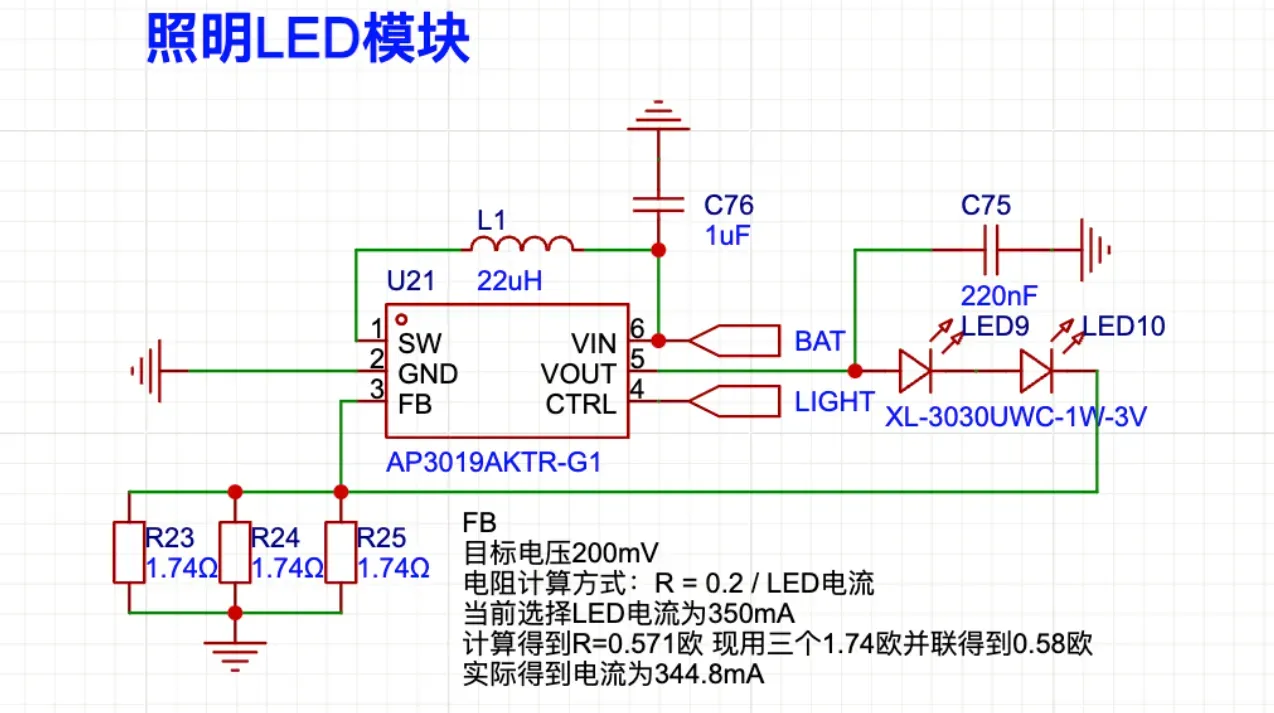
照明LED驱动
原本计划在遥控器上加入照明手电筒功能,但由于外壳机械设计变化,取消了该功能。该电路是可以正常使用的。使用时需要注意LED的发热。
-
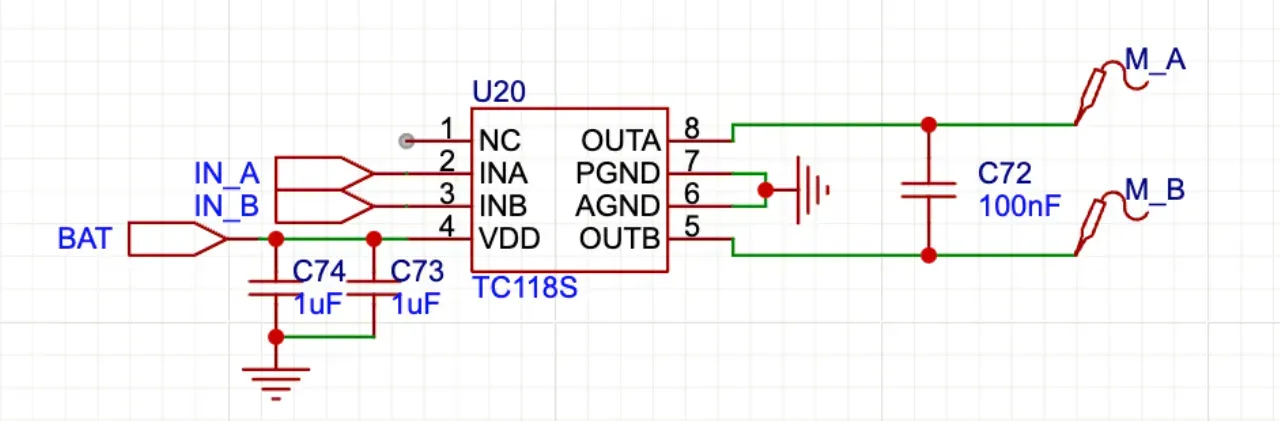
振动马达驱动
振动马达驱动本质上就是一个直流电机驱动,使用电机驱动芯片进行功率回路的控制,单片机引脚电流不足够驱动电机转动。我使用的是转子振动马达,本质上就是驱动一个直流电机,给电机通电旋转即可。如果使用线性马达,控制方式会略复杂。转子振动马达选型时需要注意驱动电压,应当选择3V左右的马达,如果电压不匹配,需要通过控制PWM占空比防止马达功率过大烧毁。该振动马达需要自行选择,BOM表中不提供参考链接,也可以不使用该部分电路。
-
晶振防潮问题
在测试过程中发现,当空气湿度大于90%时,常出现遥控器死机的问题,且无法通过reset恢复。排查后发现是由于湿度较大时,晶振的22pF电容容值发生较大变化,导致晶振信号无法正常到达MCU,从而导致MCU死机。
可以通过将晶振附近的两个22pF电容封胶解决该问题。由于滑板需要在外壳缝隙灌胶进行防水处理,所以电调板目前没有发现该问题。
分电板
分点板上有保险丝与电源开关,提高系统安全性。同时将充电接口转接并固定,方便插拔充电线。保险丝可以使用14A保险丝,不可以删去该保险丝。如果电调板上的TVS二极管烧坏,该保险丝能够很好的保护电路。
更多软件与机械设计开源请查看开源文档:https://shouchenyu.feishu.cn/wiki/PxnSwaRRRixkaokr8oBcpYotnyb
希望大家多多在哔哩哔哩支持我的视频,视频观看量大会出详细的各个部分设计讲解视频!!https://www.bilibili.com/video/BV1cr2sBsEsF/
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论