

开源协议
:GPL 3.0
创建时间:2025-03-22 11:33:47更新时间:2025-05-12 10:54:10
描述
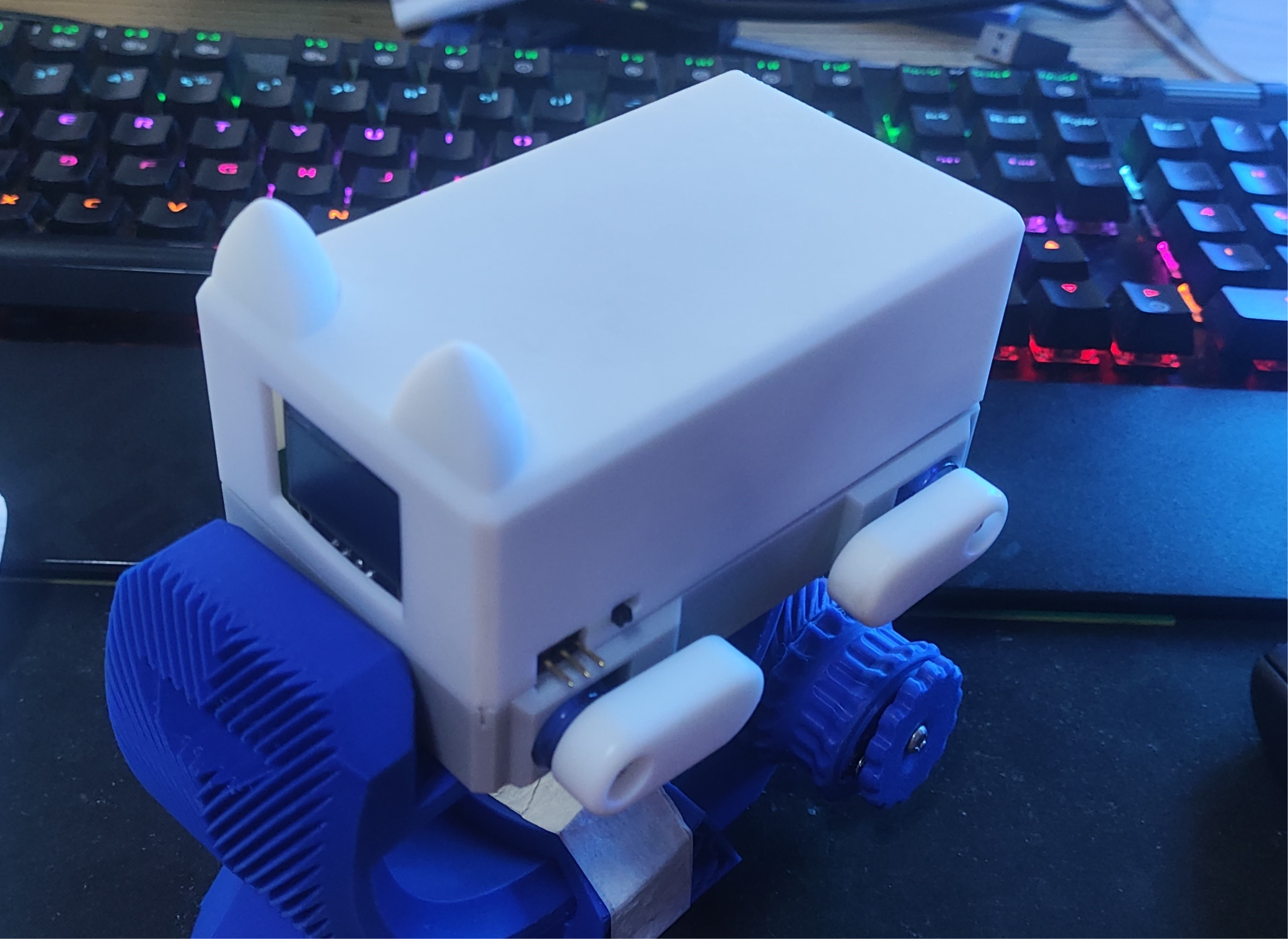
复刻Robot机器狗🐶项目,详情参考https://wiki.lceda.cn/zh-hans/course-projects/
与原项目相同之处不再赘述,下面说明修改的地方
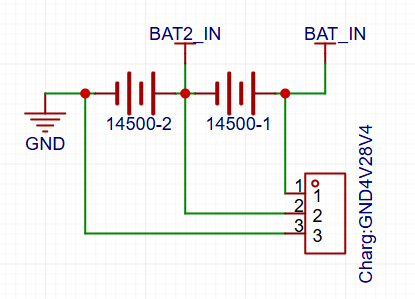
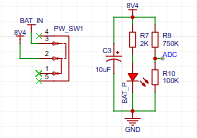
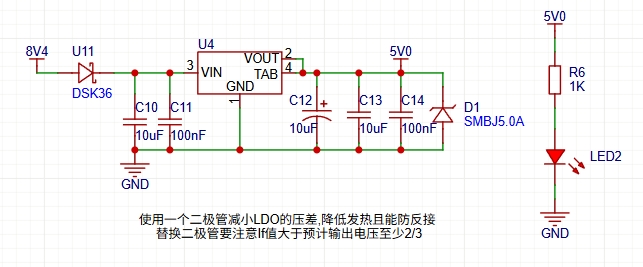
- 将电池盒改为两个分立器件,方便进行外部充电.增加总电源打开指示灯

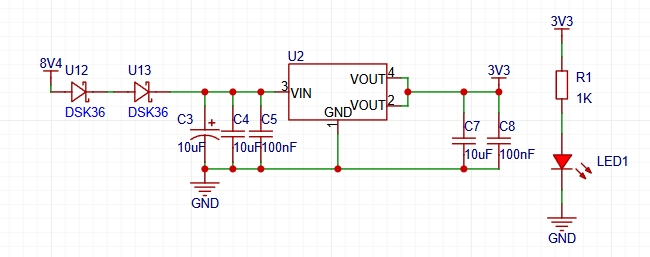
- AMS1117输入端使用二极管减小LDO的压差,降低发热且能防反接,如需替换二极管则需要注意If值大于预计输出电压至少2/3,如1A输出最少需要1.7A.输出端增加电源指示灯与TVS(防止静电打坏元器件).
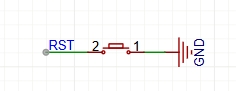
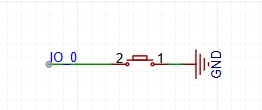
- 将io0跳线帽更换为按键,并引出RST按键,方便进行不断电下载固件与更新固件(按下io0不松手,再按下RST并松开RST,看见下载进度条之后就可以松开io0了)
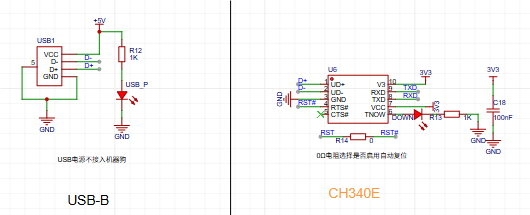
- 板载340串口芯片,下载,更新与串口通信仅需一根数据线.这里选用USB-B,方便新手焊接,并且USB-B抗松动会更好,减小接触不良的几率.0Ω电阻用来选择是否启用自动下载复位功能.USB电源不与内部连接,无法进行供电!








焊接及装配注意事项
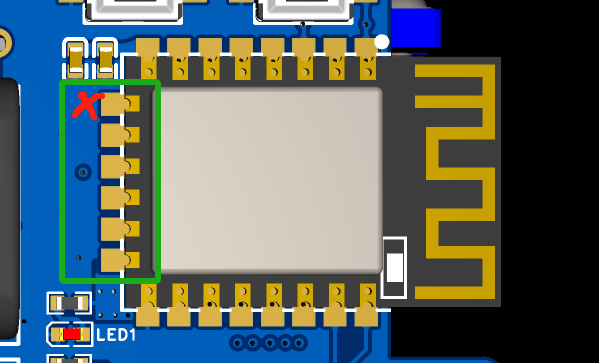
- esp8266焊接时后侧六个焊盘建议不要焊接,方便拆卸(痛苦面具.jpg)
- 两个电解电容焊接时放倒,引脚需要留出折弯余量

- CH340部分先焊接芯片及贴片部分,最后焊接USB连接器,0Ω电阻按需焊接
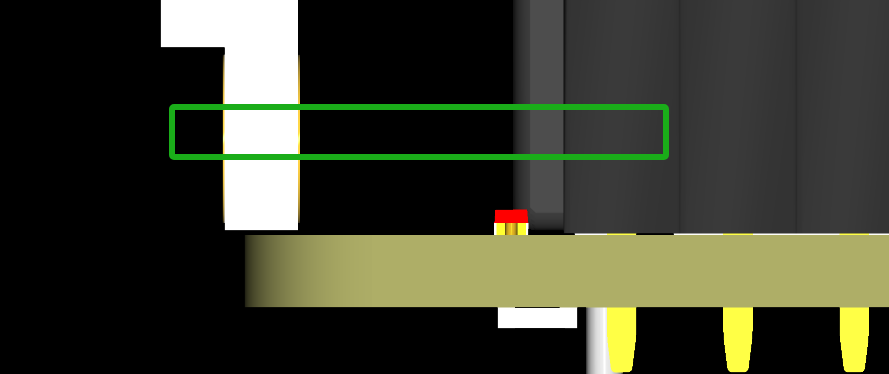
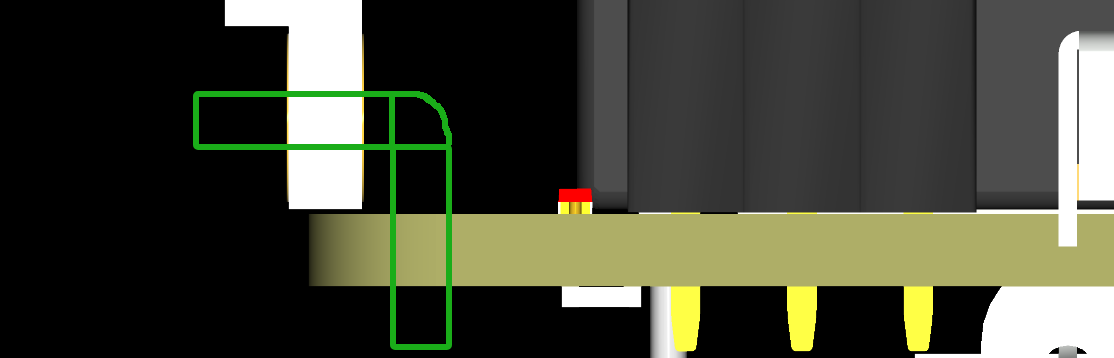
- 屏幕部分先将2.54*4(一般买屏幕会送)焊接到屏幕上,然后去掉塑料支架,并将排针掰弯,然后将其焊接至PCB上

- 四个KF2510端子可以改为XH2.54端子
 KF2510
KF2510 2.54*4
2.54*4 - 外壳底盘有方向区分,朝前方向有个缝,注意区分
- 舵机机安装位置说明,如安装错误,也可以在程序中调整





 KF2510
KF2510 2.54*4
2.54*4
目前版本外壳装配有点缺陷,后面会优化
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论