
openIPC fpv适配的ssc338q图传imx415摄像头
简介
适用于openIPC FPV固件的天空端VTX高清视频图传主板,为航模设计验证板(焊接难度大含BGA,非焊接老手不建议尝试),基于ssc338q主控,兼容SSC30KQ。实现高清、低延时、低成本的体验
简介:适用于openIPC FPV固件的天空端VTX高清视频图传主板,为航模设计验证板(焊接难度大含BGA,非焊接老手不建议尝试),基于ssc338q主控,兼容SSC30KQ。实现高清、低延时、低成本的体验开源协议
:CC BY-NC-SA 4.0
描述
一、介绍
适用于openIPC FPV固件的天空端VTX高清视频图传主板,为航模设计验证板(焊接难度大含BGA,非焊接老手不建议尝试),基于ssc338q主控,兼容SSC30KQ。实现高清、低延时、低成本的体验第一视角飞行乐趣。
更新记录:
2025.10.11 修改SD卡槽型号及SD_CDZ引脚上拉3.3V。
2024.12.3更正晶振接地电容为20pf,修改重启按键逻辑。
2024.9.11重设计的第一版
天空端VTX
主控:SSC338Q、(兼容SSC30KQ)
性能参数:解码能力4K@20; 当前固件+imx415支持1920x816@ 120fps,1920x1080@ 90fps,2560x1440@ 60fps,3840*2160@ 20fps
闪存:GD25Q128ESIG/W25Q128JVSQ (NOR FLASH,16MB),或GD25Q256EWIGR(NOR FLASH,32MB)
陀螺仪:ICM-42670P,可用于视频增稳(后期)
降压BEC:MP9447/MP4470,输入建议7.4~30V --> 5V 5A
TF扩展:最大256GB,用于固件升级,存储录像
主板安装孔:30.5X30.5mm M3孔(可掰掉),25.5X25.5mm M2孔。
板子尺寸:28.5x28.5mm ,参考dji O3尺寸。
主要元器件集中单面板设计方便加热台焊接或发立创SMT,背面仅少数几个阻容 和接口座。
摄像头接口: FPC 25P 0.3mm ,主板用翻盖下接,摄像头用前插后压下接(另需购买FPC 0.3MM间距的25p排线 方向同向 长度12-20mm)。
TELEMETY 数传串口:1.25mm 4P(或带锁扣的GH1.25 4P),支持BF、INAV、ardupilot飞控输出的MAVLINK协议的飞行状态数据,也可接飞控输出的MSPOSD叠加数据到图像上。
usb WiFi接口:1.25mm 4P(或带锁扣的GH1.25 4P) ,连接rtl8812au、rtl8812eu等芯片的无线WiFi网卡。
ETH 网络接口:sh1.0 4P ,通过网线连接到主控进行调试配置。
debug调试接口:sh1.0 4P,连接串口工具进入主控控制台进行调试配置
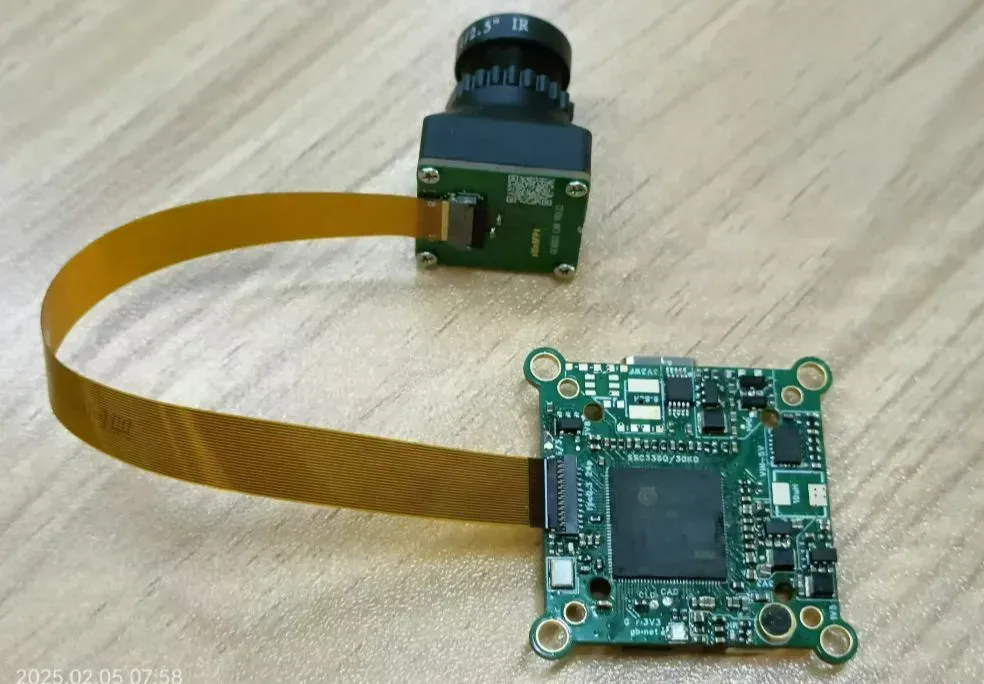
摄像头
sensor:索尼IMX415 ,当前固件使用1280x720p 120fps,可达最低延迟,35ms左右(接收端用radxa zero3w与144HZ屏)。
摄像头接口: FPC 25P 0.3mm,前插后压下接。
摄像头安装使用3d打印件,19mm摄像头外壳,孔距16,1.4螺丝。(兼容监控通用的M12镜头座)
烧录固件
空片需使用CH341A、minpro-i之类的编程器,使用其配套的软件对flash直接烧录SSC338Q型号的完整.bin固件:每日更新的固件下载链接https://openipc.org/cameras/vendors/sigmastar/socs/ssc338q/download_full_image?flash_size=16&flash_type=nor&fw_release=fpv
固件由启动引导uboot、内核kernel、文件系统rootfs组成。
之后更新升级内核与文件系统即可
升级系统
此方法也适用于切换固件版本,比如FPV、rubyfpv固件直接切换。
1、离线升级系统:
下载文件解压得到4个文件,通过scp命令或winscp软件上传到摄像头/tmp/目录下,https://ghp.ci/https://github.com/OpenIPC/firmware/releases/download/latest/openipc.ssc338q-nor-fpv.tgz (前面的https://ghp.ci/用于国内网络加速,如果不可用了请访问该网站获取最新前缀替换,或者去掉后直接访问)
然后VTX系统上执行:sysupgrade --kernel=/tmp/uImage.ssc338q --rootfs=/tmp/rootfs.squashfs.ssc338q -z -n
离线升级系统,uboot环境方法:
需连接debug串口,主板上电立即不停输入Ctrl+c键打断系统,进入uboot环境。同时连接好网线
然后跟着官方教程做 https://openipc.org/cameras/vendors/sigmastar/socs/ssc338q
2、在线升级系统:
摄像头网线连接到路由器,或连接到电脑网口后通过另一网口开启网络共享,然后vtx上电即可自动获取IP上网。
然后VTX系统上执行:sysupgrade -r -k -n --force_ver --url=https://ghp.ci/https://github.com/OpenIPC/firmware/releases/download/latest/openipc.ssc338q-nor-fpv.tgz (里面的https://ghp.ci/用于国内网络加速,如果不可用了请访问该网站获取最新前缀替换,或者去掉后直接访问)
参数设置
方法1:usb转串口工具连接vtx主板的debug串口,使用PUTTY、mobaxterm等软件连接串口。 (可以看到完整启动过程信息)
方法2:连接网线,使用putty、mobaxterm等ssh类软件连接192.168.1.10,如果插路由器请自行查看IP。 (系统启动后才能连接,可以vlc软件拉取查看摄像头视频流,可以在线网络升级系统)
以下操作为命令行操作,也是最基础的调参原理。 普通用户还是建议使用openipc configurator配置器软件用鼠标操作(连网线即可)。
编辑摄像头相关:vi /etc/majestic.yaml,然后输入i键进入编辑模式,修改video0 下的帧率FPS、分辨率size等参数。
推荐的编码性能size : 1920x816 FPS : 120,其次还可1920x1080@ 90fps,2560x1440@ 60fps。 编辑完成后按 :键退出编辑,然后输入wq 回车键保存退出。
修改码率bitrate : 4096,改高需要wfb.conf中mcs提高。
编辑无线传输:vi /etc/wfb.conf ,修改wifi信道channerl = 161 默认;修改driver_txpower_override=1默认最低(8812eu网卡开高功率建议40-55);修改mcs =1 不建议超过3.
编辑数传模式:vi /etc/telemetry.conf , 修改router=0 (默认0 使用mvlink遥测,2为msposd叠加视频数据)
openIPC固件项目:https://github.com/OpenIPC
VTX图传固件发布下载:https://github.com/OpenIPC/firmware/release
configurator配置器下载:https://github.com/OpenIPC/openipc-configurator
安卓手机接收端软件下载:https://github.com/OpenIPC/PixelPilot/releases
电脑接收端软件下载:https://github.com/OpenIPC/fpv4win/releases
高性能开发板接收端固件下载:https://github.com/OpenIPC/sbc-groundstations/releases
免调参、高易用性rubyfpv固件网站:https://rubyfpv.com/
以下是渲染图:




设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论