


桌面机器人PiexBotR1
简介
基于ESP8285的ESP-M2迷你模块制作的舵机机器人 特点:基于指令控制的二自由度舵机机器人,拥有可视化的自由编辑录制及保存的表情,文字,声音,动作等指令
简介:基于ESP8285的ESP-M2迷你模块制作的舵机机器人 特点:基于指令控制的二自由度舵机机器人,拥有可视化的自由编辑录制及保存的表情,文字,声音,动作等指令开源协议
:GPL 3.0
描述
一个非常简单的ESP8285/ESP8266制作的舵机机器人
使用比较迷你的ESP-M2模块,程序上ESP8285/ESP8266通用,需要至少2M flash配置
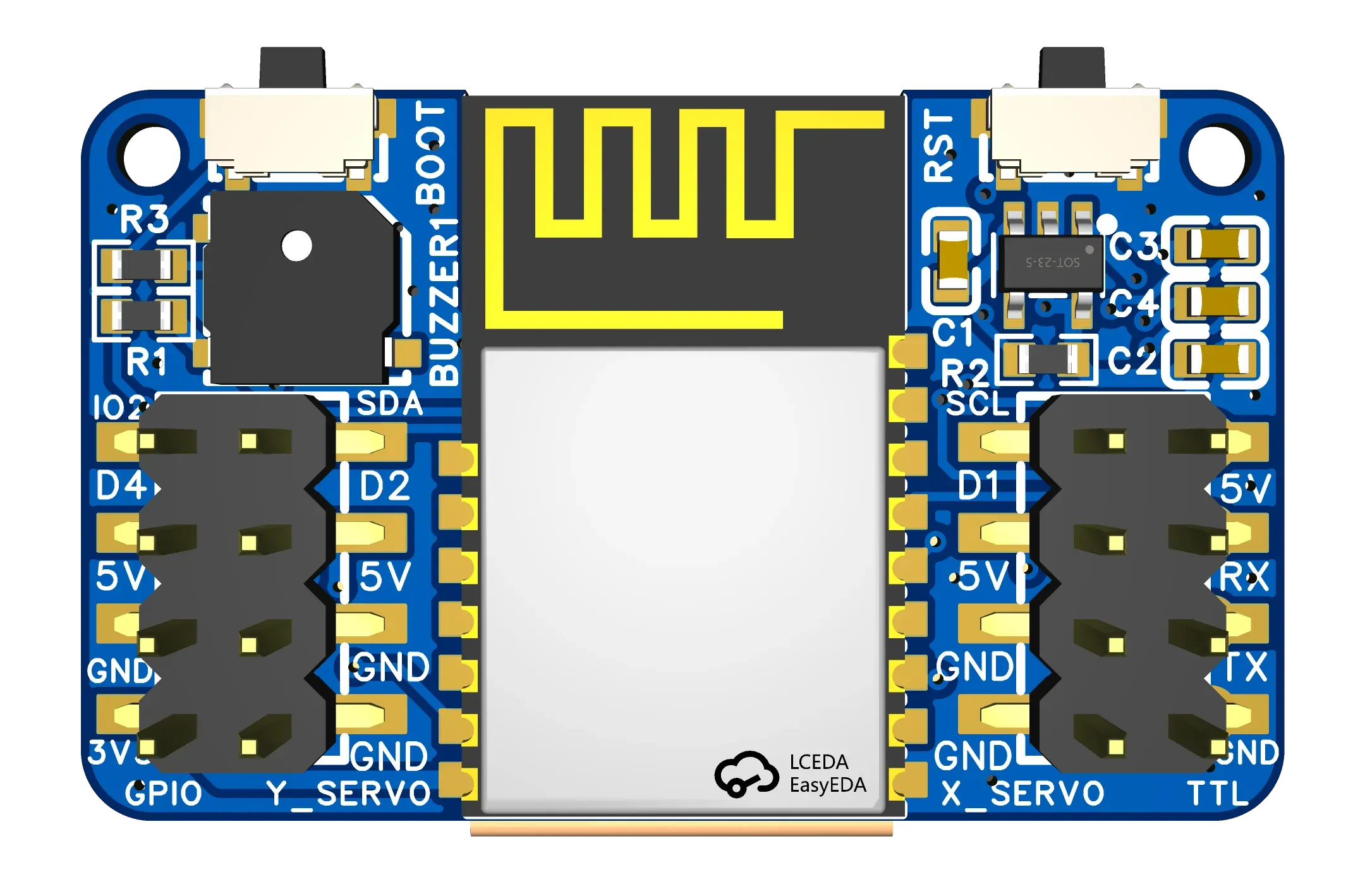
拥有1个12864的LCD显示屏,1个蜂鸣器,2个按键,2个舵机接口及1个TTL接口和预留GPIO2引脚
整体电路非常简单,一开始使用的时5020的蜂鸣器,实际测试音量非常小,因为板子空间有限,最后使用5030蜂鸣器,稍微大一点点,类似老式的电子手表的声音音量。由于音量比较小,R3电阻换成了0R,没有必要再使用限流电阻了
其他元器件应该都比较好买到,显示屏是在咸鱼上购买的,价格也很便宜,可以搜索:0.96寸SPI接口12864LCD液晶显示屏,店主ID:屏友屏友
【闲鱼】https://m.tb.cn/h.SJ5Lilg?tk=OICQfSFSfgD CA381 「我在闲鱼发布了【0.96寸SPI接口12864LCD液晶显示屏】」
点击链接直接打开

支持使用web网页控制,完全可以自由编辑创作的表情显示,文字显示,声音播放及动作播放功能,具体功能演示可以查看下面B站视频
3D外壳下载地址:桌面机器人PiexBotR1 来自 wdmomo MakerWorld:免费下载 3D 模型
【PiexBotR1安装指南】 https://www.bilibili.com/video/BV1tq11B9ECu/?share_source=copy_web&vd_source=007095c5554b46c418fe0fc15a475311
【PiexBotR1安装指南】 https://www.bilibili.com/video/BV1tq11B9ECu/?share_source=copy_web&vd_source=007095c5554b46c418fe0fc15a475311
【PiexBotR1功能介绍】 https://www.bilibili.com/video/BV1xk11BnEqt/?share_source=copy_web&vd_source=007095c5554b46c418fe0fc15a475311
固件刷机可到下面地址在线更新,更新时需要借助TTL工具,就是普通的USB串口工具即可,CH340等等
注意:刷机时按住boot再通电

设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论