


智能机器狗训练营
简介
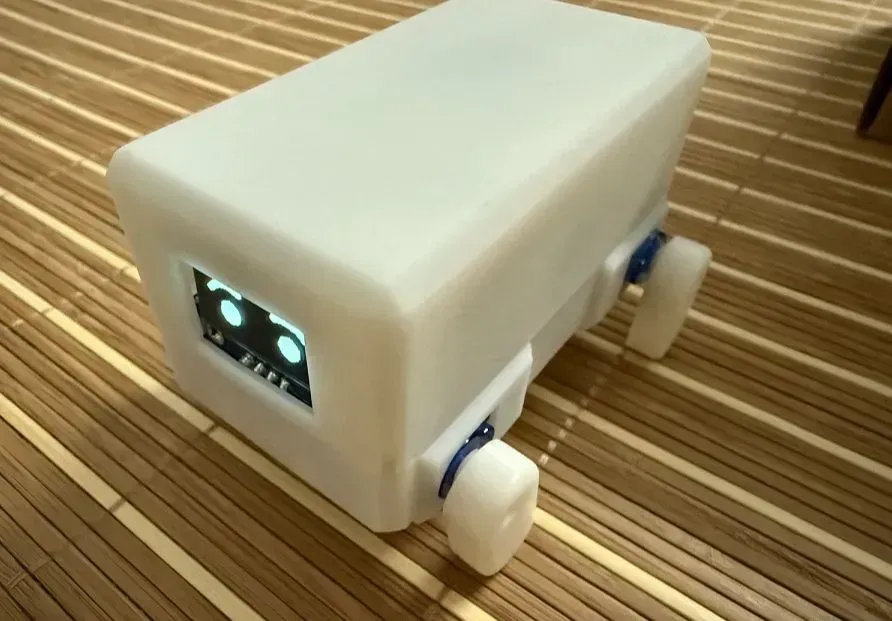
本项目以ESP8266为核心,构建一个能够实现手机控制的桌面宠物,能够显示表情,天气以及时钟。
简介:本项目以ESP8266为核心,构建一个能够实现手机控制的桌面宠物,能够显示表情,天气以及时钟。开源协议
:GPL 3.0
描述
一、硬件参数
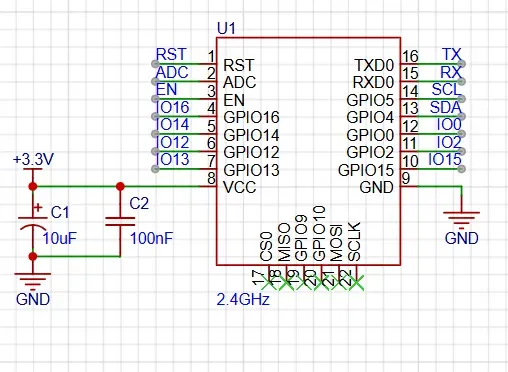
1、主控芯片
本次项目使用了ESP8266为主控,ESP8266芯片以其高集成度、优异的RF性能和低功耗著称,集成了完整的Wi-Fi功能。其内置的Tensilica L106 32位RISC处理器,最高工作频率可达160 MHz,支持实时操作系统(RTOS)和Wi-Fi协议栈,使其在处理数据传输及任务管理时具备极强的灵活性和高效性。
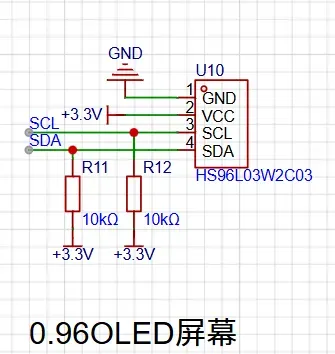
2、0.96OLED屏幕
在该项目组采用了OLED屏幕模组,该模组本身已经集成了驱动电路,因此不需要额外设计复杂的外围电路。通过直接将屏幕模组与主控模块的IIC接口相连,即可完成图像和信息的显示,屏幕模组可以显示表情、天气以及时间。电路设计如下图。
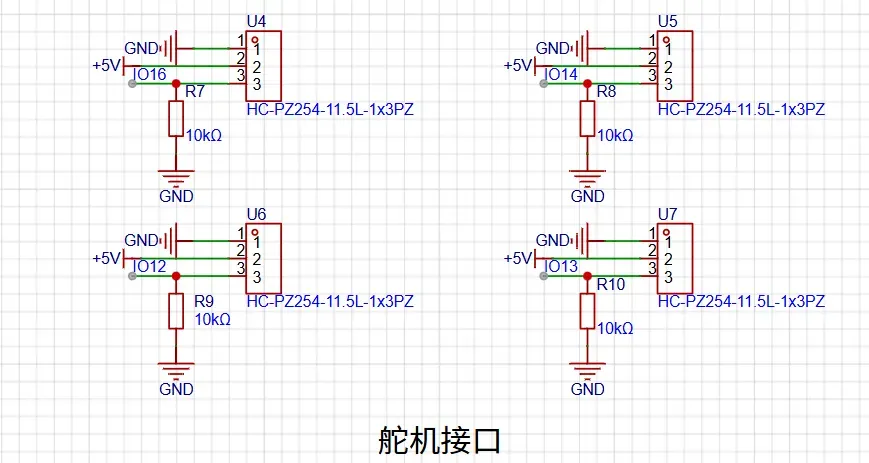
3、舵机部分
在本项目中使用了4个SG-90 180度版本舵机,自带限位器,无需电机校准。在舵机接口电路中,添加了下拉电阻,确保电机停转和起始状态稳定,在后续的软件调试中也会更方便。电路如下图。
4、ADC电量检测电路
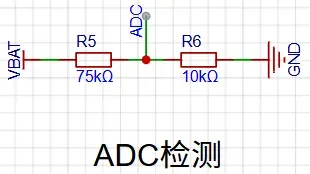
修改分压器适配8.4V到1V 现在需要适配新的输入电压范围(最大8.4V)到ESP8266的1.0VADC输入。分压比计算如下:
分压比=1V/8.4V≈0.119
根据分压公式:R2/(R1+R2)=0.119
假设保持100K,则:100K/(R1+100K)=0.119
R1≈740K
输出电压为:Vo=8.4×100k/(740k+100k)≈1.0V
当电压较低时(4.2V),输出电压为:Vo=4.2V×100k/(740k+100k)≈0.5V
分压电路成功将8.4V的输入电压压缩到0-1V范围内。
5、电源电路
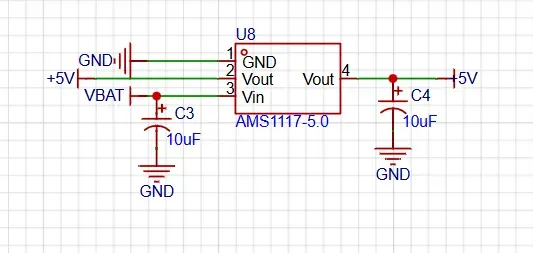
(1)舵机供电
根据舵机的数据手册,舵机的供电电压为4.8V-6V,所以使用5V电压来驱动。在本次项目中使用了两节14500电池串联电压达到了8.4V,需要降压到5V,所以我们选择了AMS1117-5V固定输出LDO。电路设计如下图。
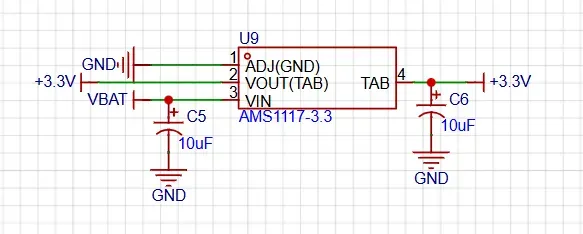
(2)主控供电
根据ESP8266数据手册可知,ESP8266的供电电压为3.3V,所以我们选择AMS1117-3.3V固定输出LDO,电路设计如下图。
二、软件设计
1、程序下载
软件部分使用嘉立创提供的文档代码,由于使用的是180度的舵机,所以下载的180_V1.1源码。
ESP8266模组主要使用TTL串口下载方式,需要准备一个USB转TTL或者DAP-Link。
2、硬件配置
在硬件设计中,将下载模式跳线接口使用跳帽进行短接后上电就可进入下载模式进行下载程序,将板子上的TX、RX与烧录器的TX、RX交叉相连。
3、代码烧录
使用ESP烧录工具进行烧录:
打开软件,会显示以下窗口:
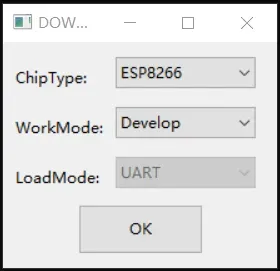
点击OK后进入主界面,配置如下:
设置固件(firmware.bin)偏移地址0x00000并在左侧复选框打勾
设置文件系统(spiffs.bin)偏移地址0x300000并在左侧复选框打勾
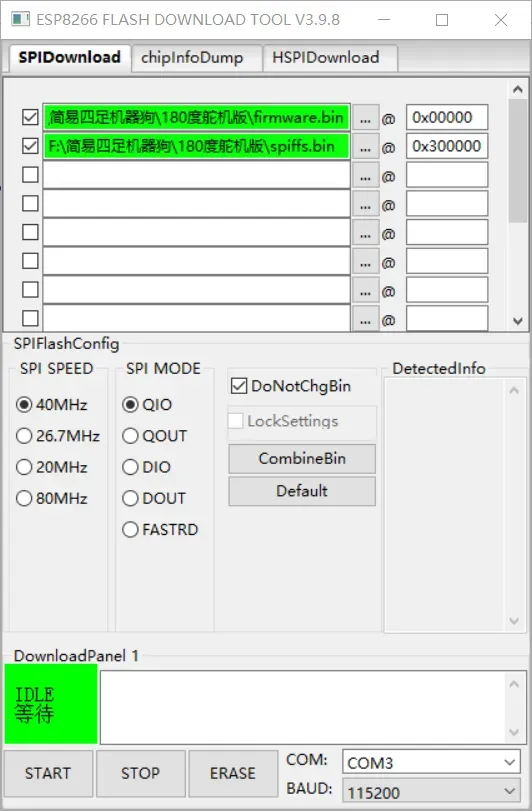
烧录成功后拔下短接跳帽,重新上电即可运行。
设计图
BOM
 克隆工程
克隆工程工程成员
 暂无相关工程
暂无相关工程
评论