

开源协议
:GPL 3.0
描述
描述
超高成本超烂布局超强立创开发板拓展版
(dont watch this)
LOG:/****************************************************************************/
2025-5-6速通训练营硬件,打板
2025-5-7 新增IIC接口,用于FDC2212通讯
2025-5-11 打板收货
2025-6-11 拖太久了,速通硬件焊接,软件部分调试
/****************************************************************************/
简易PID入门套件
项目介绍
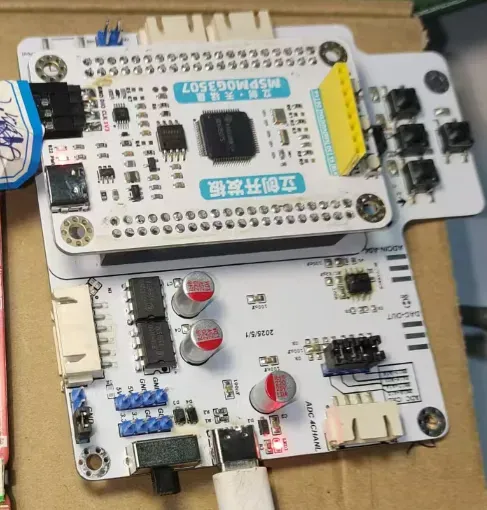
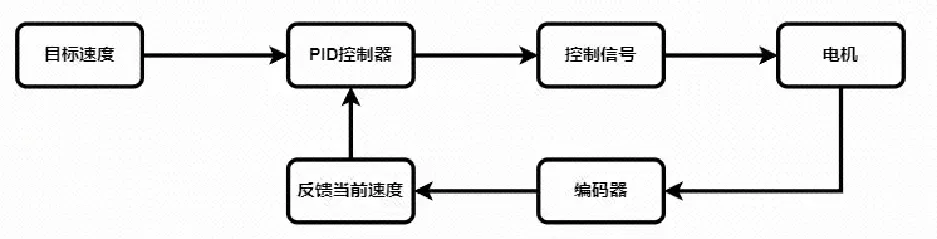
基于 立创·天猛星 MSPM0G3507 开发板制作的简易 PID 入门项目。对带编码器的电机,使用 PID 控制算法,实现 定速功能 和 定距功能,再通过屏幕显示出 PID 参数以及当前值与目标值的动态曲线变化。
传统PID教学常止步于理论,缺乏可视化调试与实时参数优化的实战训练,该项目以“简化复杂理论、突出实践应用”为特色,是缩短PID学习曲线、提升竞赛实战能力的优质资源。
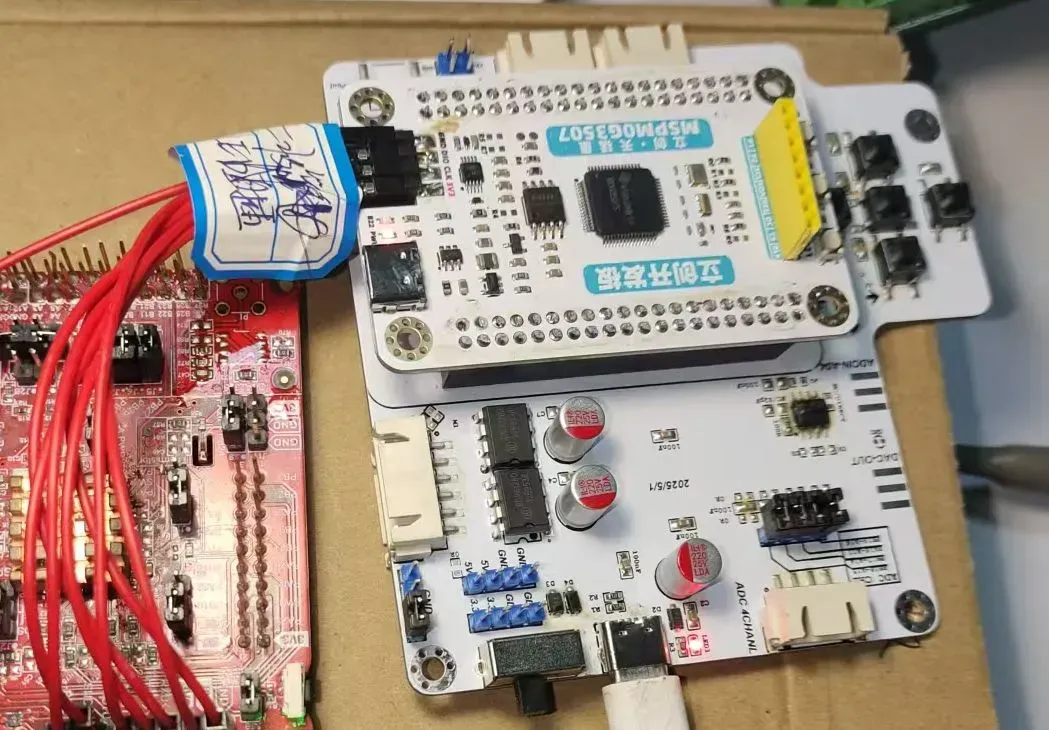
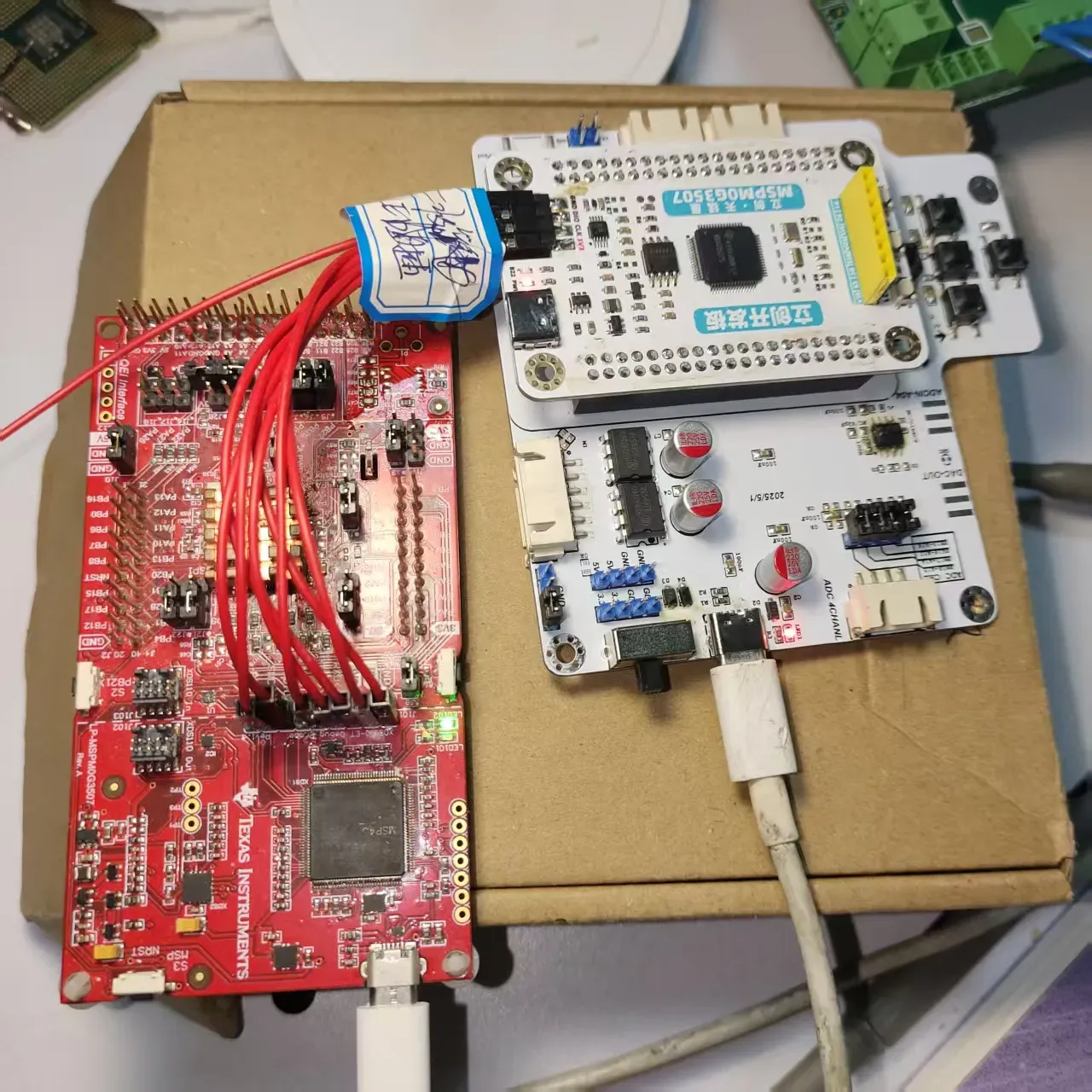
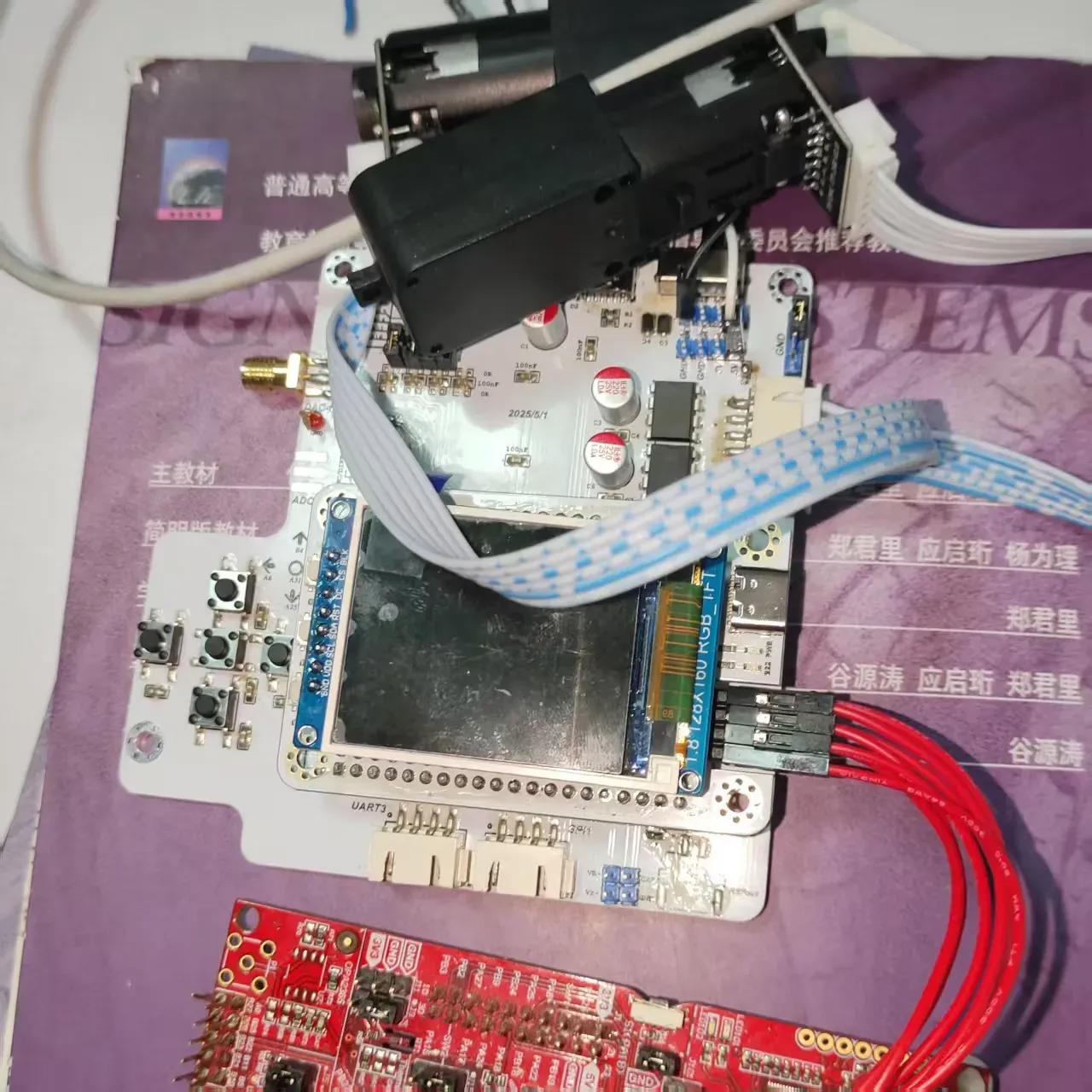
硬件使用立创·天猛星 MSPM0G3507 开发板作为主控,BDR6126D 作为电机驱动,屏幕使用1.9寸中景园SPI屏幕。电机接口适配市场上大多数编码器电机接口。
同时引出多路AD测试接口,一路DAC接口,课选择板载Vref或者外部参考源,统一使用XH2.54 XP接口,方便插拔。
- 定距: 根据电机旋转一圈的编码器脉冲数,确定电机旋转一圈为多少个 x 脉冲(x脉冲/圈),通过当前脉冲数和目标脉冲数,通过 PID 控制算法,使电机当前实时脉冲以最快的速度接近设定的目标脉冲,达到定距移动的效果。(简单来说就是让电机固定走多少步,走多了就退回,走少了就再走几步)
 |
 |
|---|---|
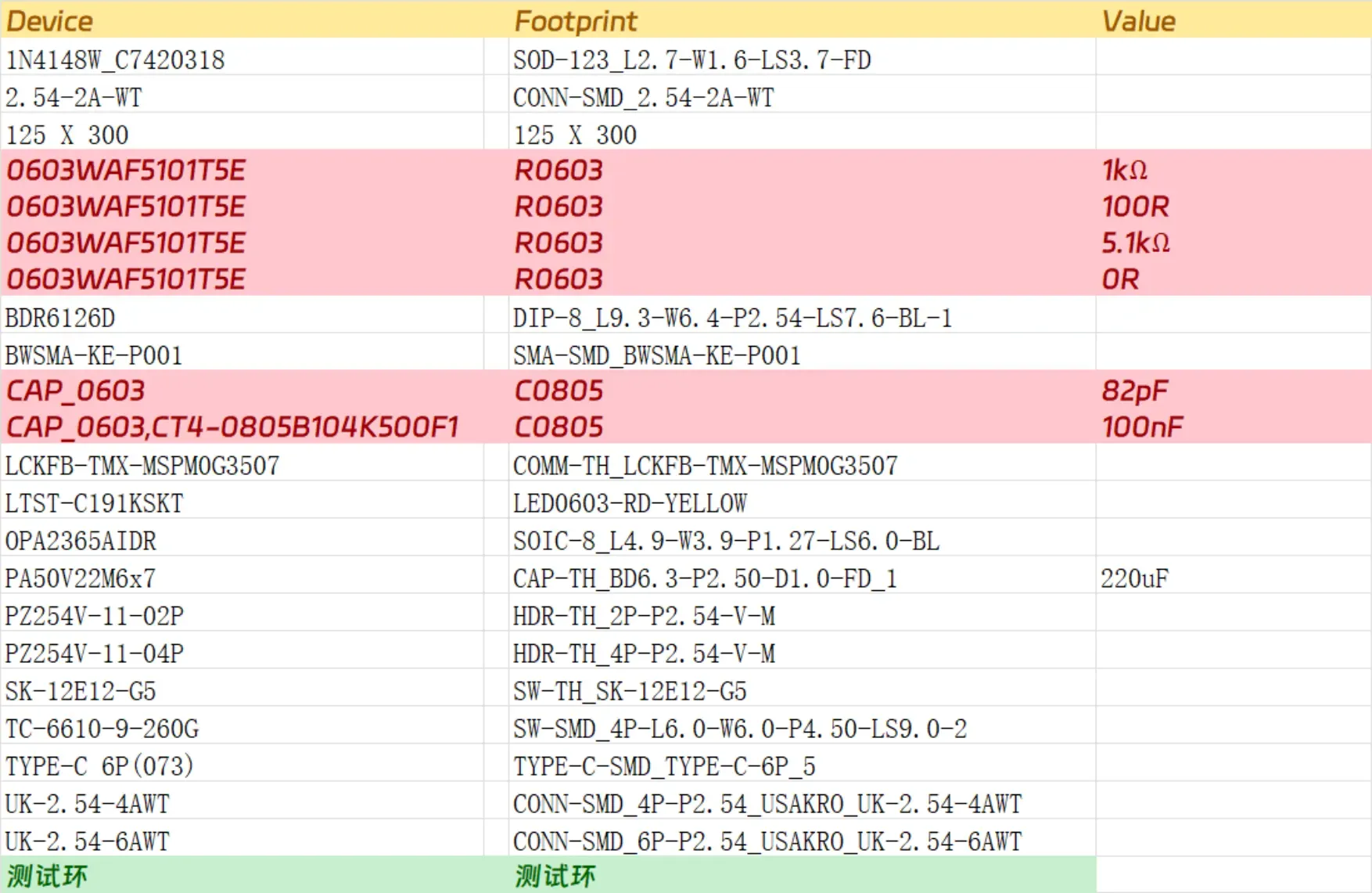
| 项目焊接说明表 | PCB焊接组装完成展示 |
项目在软件方面,使用裸机的方式编写驱动和逻辑,通过 轮询 + 中断 + 状态机 的架构完成项目。PID 部分不会大篇幅介绍背景、由来、模型等学术说明,将直接告诉你如何使用PID。最终可像 1 + 1 = 2 一样,直接将参数无脑带入公式,应用PID。
 |
 |
|---|---|
| 定速闭环控制框图 | 定距闭环控制框图 |
功能需求
- 屏幕显示二级菜单,通过按键选择;
- 屏幕显示PID曲线变化;
- 按键长短按控制和调参;
- 实现电机PID的实时定速调整;
- 实现电机PID的实时定距调整;
项目展示
项目代码开源地址
硬件打样说明
EDA专业版工程中的 V1.0.2是版本迭代效果。建议使用V1.0.1版本。,如果想节省成本也可以使用V1.0.1版本。
V1.0.0 是初版,打样回来测试基本功能。
V1.0.1 是第二版,加入一个IIC接口的引出,并且给手头模块做了线序兼容。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论