



电赛TIPID项目
简介
利用利用立创天猛星MSPM0G3507开发板完成PID控制电机
简介:利用利用立创天猛星MSPM0G3507开发板完成PID控制电机开源协议
:GPL 3.0
描述
- 设计背景以及功能介绍
PID是电赛中常用的控制算法。利用PID可以对智能车控制,以及电机的调速。PID的原理主要包括一下三个环节。
- 比例(P)环节:根据当前误差来成比例地调节控制量。误差越大,控制量变化越大,能快速响应误差,但可能存在稳态误差。
- 积分(I)环节:对误差进行积分,累积过去的误差信息,用于消除稳态误差。只要有误差,积分项就会不断累积,使控制量不断变化,直到误差为零。
- 微分(D)环节:根据误差的变化率来调节控制量,能预测误差变化趋势,提前进行修正,可改善系统的动态响应,减少超调量,提高系统稳定性。
PID对不同类型的系统和干扰具有较好的适应性,能在一定程度上克服系统参数变化和外部干扰的影响,保持稳定的控制性能。PID原理相对简单,在硬件上容易通过模拟电路或数字算法来实现,且通过调整三个参数就能适应多种控制场景。
利用简单的PID算法来控制电机。来学习掌握PID算法。学习掌握PID对于提升个人能力有作用。非常适合电子技术的初学者以及以及想要参加电赛的同学的人群。该项目具备以下几个亮点:
- 设计简单,利用立创天猛星MSPM0G3507开发板完成PID控制,不用设计MSPM0G3507的电路。
- 焊机方便,大多数元件都是直插封装的,焊接非常方便,即使是初学者也能快速学会如何焊接。
- 项目综合程度高,实用性强,完成该项目可以掌握PID算法。
功能介绍
该项目实现了利用PID对电机定速以及定距。
2.硬件电路的设计
主要包括四个部分。
- 电源输入电路
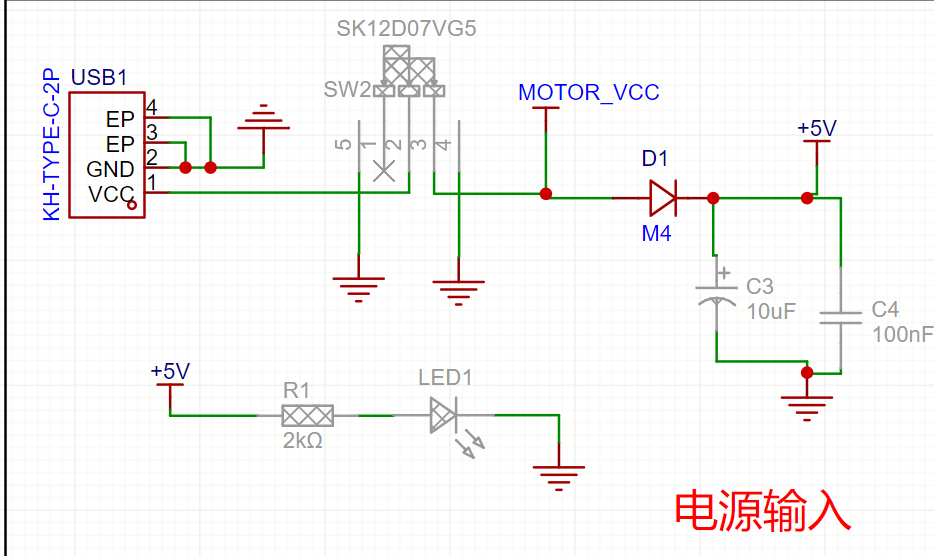

直接使用一个 TYPE-C 接口输入 5V 电源,通过开关进行控制。其中有两个电源信号:MOTOR_VCC 和 +5V。 MOTOR_VCC 是直接将TYPE-C的电源接入电机正负极。 +5V 是由 MOTOR_VCC 经过一个防倒灌二极管 U12 后的电源,该电源接入到开发板的5V上,为开发板供电。
2.电机驱动与接口电路

电机驱动芯片U7,使用的是由巴丁微电子生产的 BDR6126D ,这是一款大功率直流电机驱动芯片,最高输入 18 V ,最大持续输出电流 4.5 A。考虑到大多数的编码器电机接口线序不一致的问题,在原理图中就放置了3种线序。如果接口不对,也安排了排针接口,自己接。
下面是芯片的应用原理示意图

下面是芯片的输出真值表,H是高电平,L是低电平。

3.按键电路

利用五个开关来控制电机。
4.开发板与信号连接

开发板的输入电源是+5V,因为开发板本身自带了5V降压3.3V的功能,所以直接接出3V3到编码器的电源输入。 电机控制信号 BI\FI 必须接入支持PWM功能的引脚,原理图中选择了 GPIOA26 和 GPIOA27。GPIOA26 选择通过 TIMG7-C0 输出PWM,GPIOA27 选择通过 TMG7-C1 输出PWM。按键可以选择任意的GPIO口。

这就是硬件电路的原理图部分。要对原理图进行DRC,其中引脚悬空的警告不用管。
PCB部分

对元器件进行摆放,以及走线。走线要注意电源线要加粗走20mil。
然后进行铺铜。

铺铜之后进行DRC检测。如果没有错误和警告就可以进行打板验证了。
3.元器件购买
首先根据物料清单共买元件。
以下物品需要自行去购买
| 序号 | 器件名称 | 型号参数 | 数量 |
| 1 | LCD屏 | 1.9寸 ST7789 SPI 屏幕 | 1 |
| 2 | TTL电机带编码器 | 6V 1:48减速比 霍尔传感器 | 1 |
| 3 | 电机连接线 | XH双头一正一反;6P;150mm | 1 |
| 4 | 十字沉头螺丝钉 | M3x28[50只] | 2 |
| 5 | M3铜柱 | M3*18+4[10颗] | 4 |
| 6 | 螺母 | M3 [304材质/100只] | 6 |
屏幕采购说明 显示模块的1.9寸屏幕,只要满足以下要求就可以购买:
1. 驱动芯片:ST7789
2.屏幕像素:170x320
3.屏幕尺寸:1.9寸 • 通信接口:SPI
4. 接口线序:GND VCC SCL SDA RES DC CS BLK
4.焊接组装

利用立创EDA的焊接工具进行焊接,因为大部分是插件元件,所以焊接比较容易。
焊接完成进行组装。

首先把铜柱安装好,方便进行后续的组装。

然后把电机和开发板装好

最后把电机线和LCD屏幕安装好

5.代码部分

先对PID的参数进行初始化。

pid_calc函数主要完成PID中的各个参数的计算
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









