


标准版
【训练营】仿生机器狗
1.3k
0
0
0
简介
训练营,仿生机器狗!
简介:训练营,仿生机器狗!开源协议
:Public Domain
创建时间:2022-06-20 20:22:45更新时间:2022-07-18 21:20:20
描述
四条腿的狗子,可以动哦!可以实现前进、后退、左转、右转和踏步等动作!
下面为狗子的实物图:
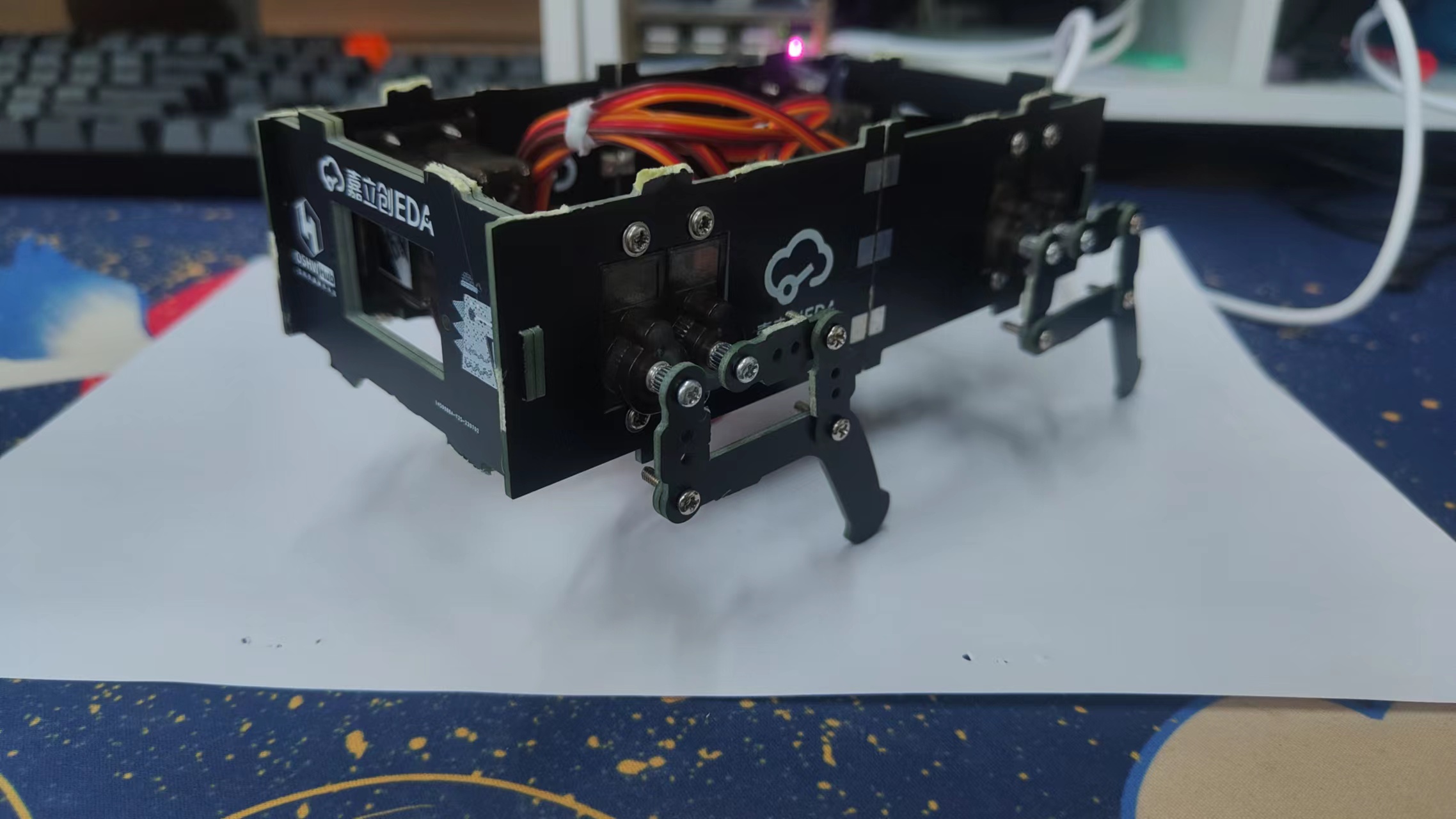
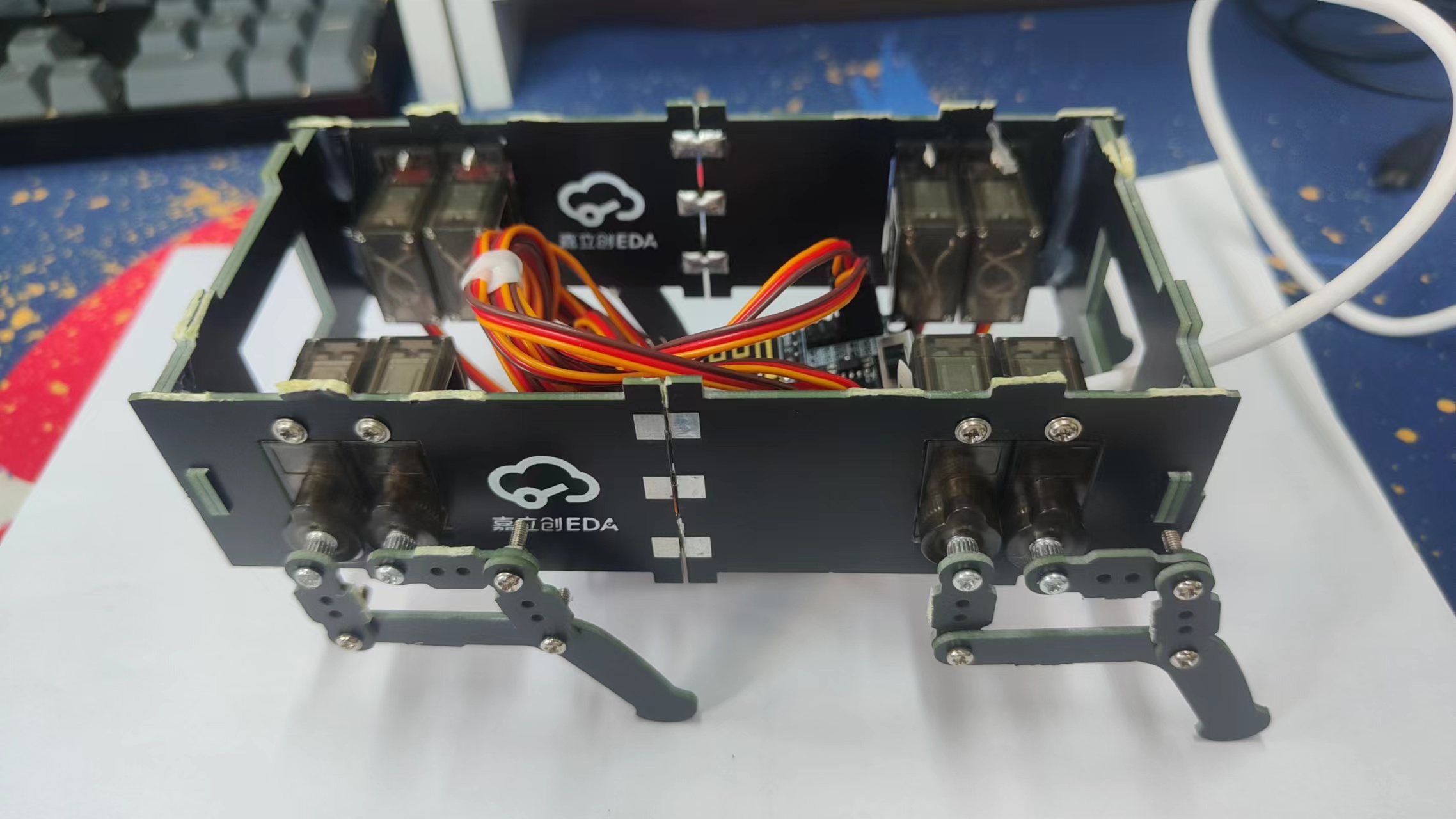
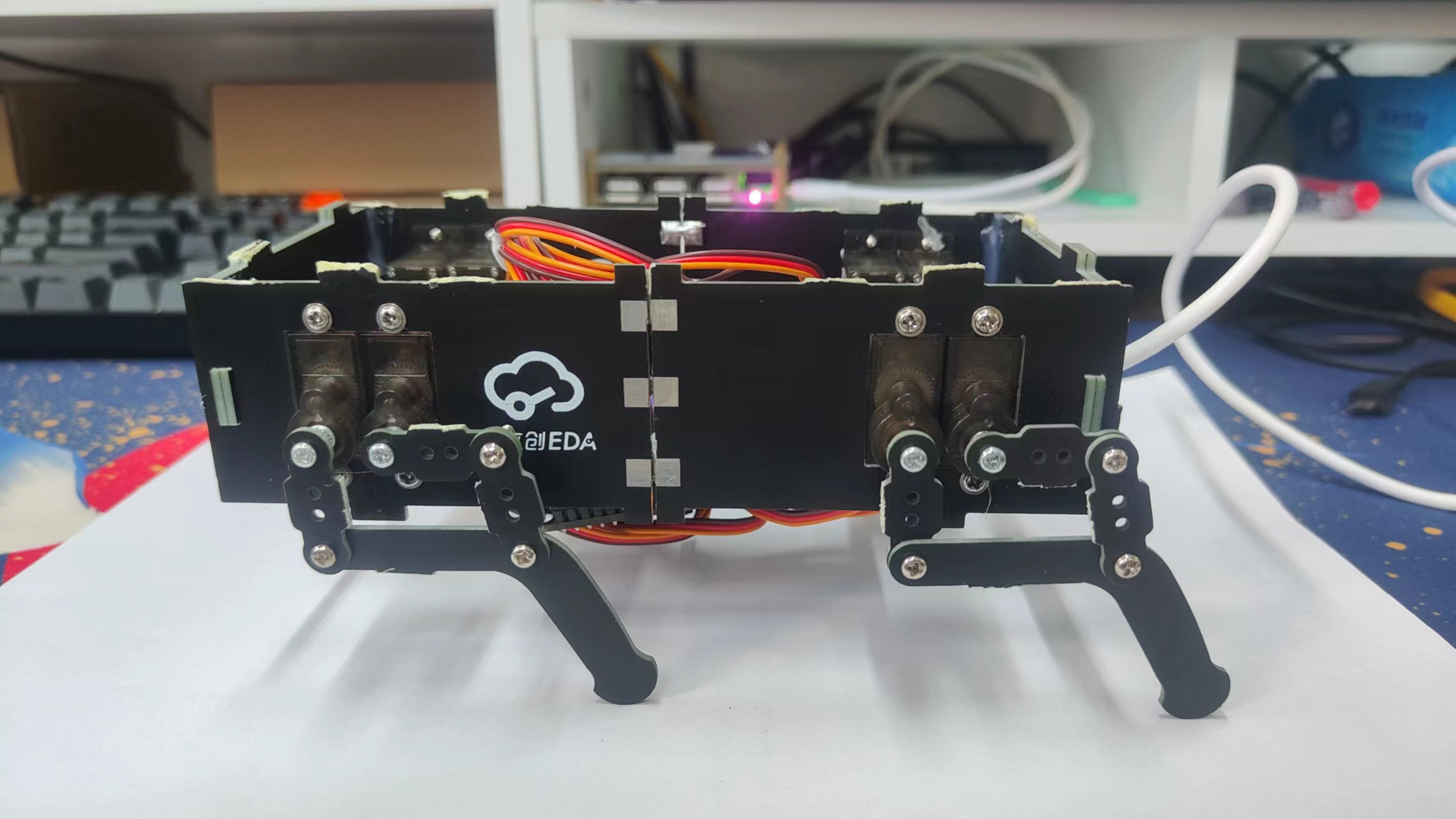
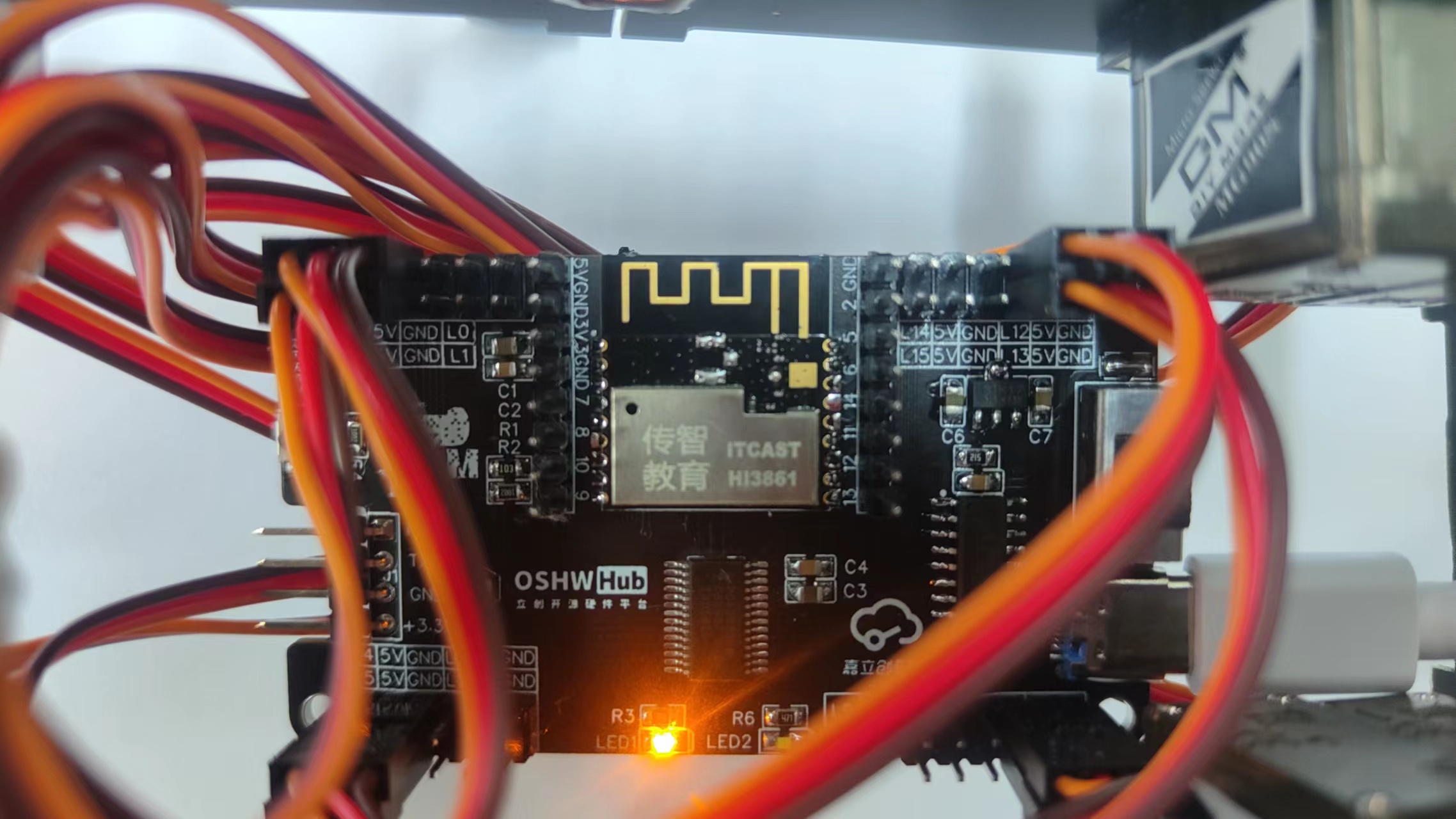
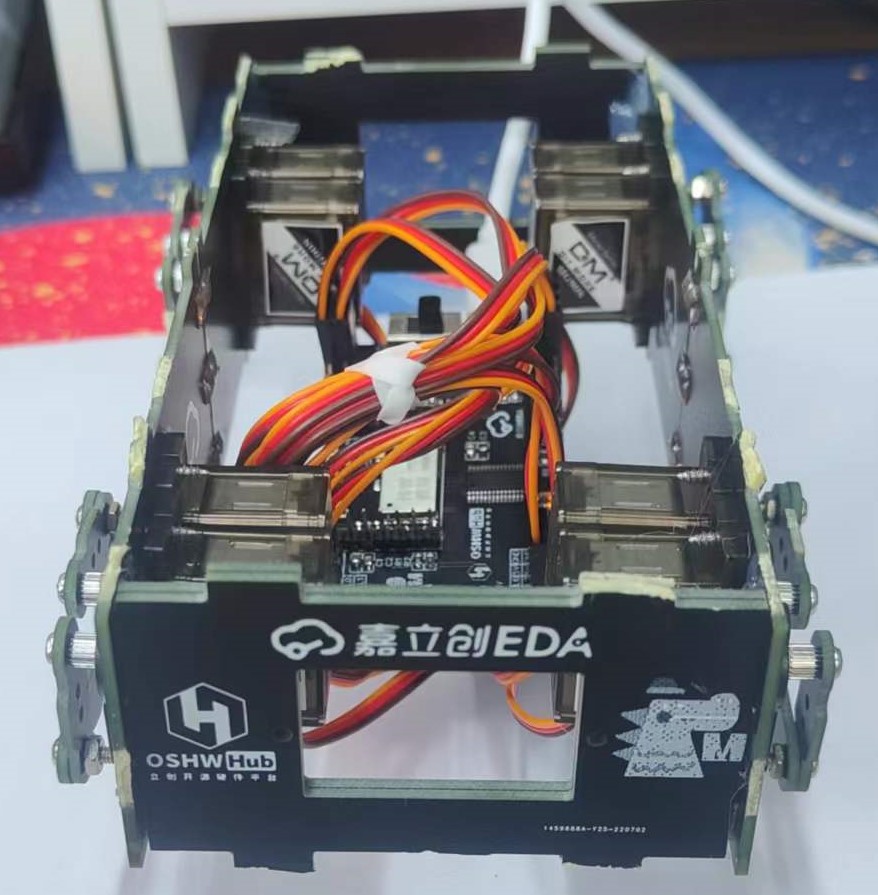
工程采用传智教育的Hi_3861模块,舵机驱动芯片采用PCA9685芯片。采用Type-C供电,带有CH340C串口芯片,可以直接用Type-C下载文件,并且下载口已经引出,可以使用TTL模块下载。此工程将Hi_3861的所有引脚已经引出,可以另加功能,并且将PCA9685的16路PWM信号全部引出。
狗子的外壳全部用PCB做的结构板拼接而成。目前,四周的外壳和狗子的腿子使用了10*10cm以内的板子,侧板尺寸太长,通过焊接得到(挺结实的),狗腿子之间用螺丝直接连接,底板和顶板还没有来得及做。
狗子的程序和主要资料都在立创EDA开源平台开源,可以参考官方例程。
购买的主要材料如下:
MG90S全金属舵机9个;
Hi-3861芯片1个;
PCA9685芯片一个;
注:(1)在PCB工程中,加了一个保险丝,由于舵机电流比较大,在调试中直接用焊锡短接;
(2)狗腿子采用螺丝连接,在运动的过程中,会出现松动的情况,可以用胶直接固定死;
(3)狗子的身体由一个PCB板裁剪而成,有点丑!!!
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论