



开源协议
:GPL 3.0
创建时间:2025-03-19 20:16:14更新时间:2025-05-06 14:10:46
描述
本项目基于ESP8266构建,是一个可以手机控制的桌面宠物.
项目功能
- ✅手机遥控
- ✅表情显示
- ✅每日天气
- ✅时钟显示
项目参数
- 本设计采用ESP8266主控,内置WIFI功能,通过AP模式遥控
- 本设计采用0.96寸OLED显示屏,支持SSD1315/SSD1306驱动,可显示表情、时钟、天气等相关信息
- 选用AMS1117 LDO线性稳压器,负责将8.4V和5V电压分别转换成5V和3.3V,为舵机及主控提供电源
- 项目支持SG-90/MG-90 180度及360度版本,推荐使用180度版本,自带限位器,无需校准电机。
3D外壳结构
3D外壳由嘉立创云CAD平台构建
3D外壳工程链接-嘉立创云CAD
主体
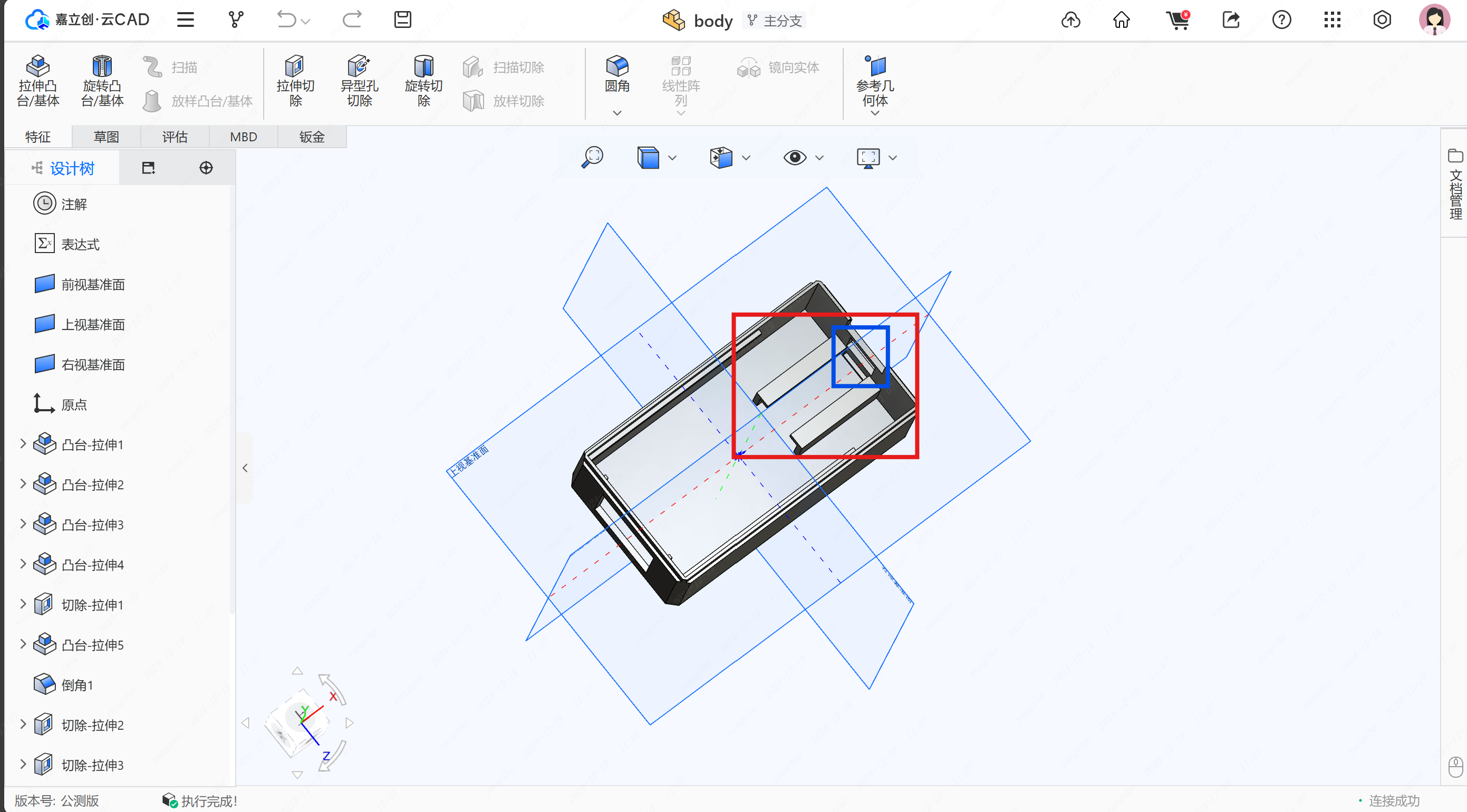
-
红框部分是8.4V的2串锂电池充电模块卡槽,连接到电路上的充电接口,可以用胶水固定
-
蓝框部分是船型10x15mm船型开关卡槽,连接到电路上的开关接口,用于通断供电电路
底壳
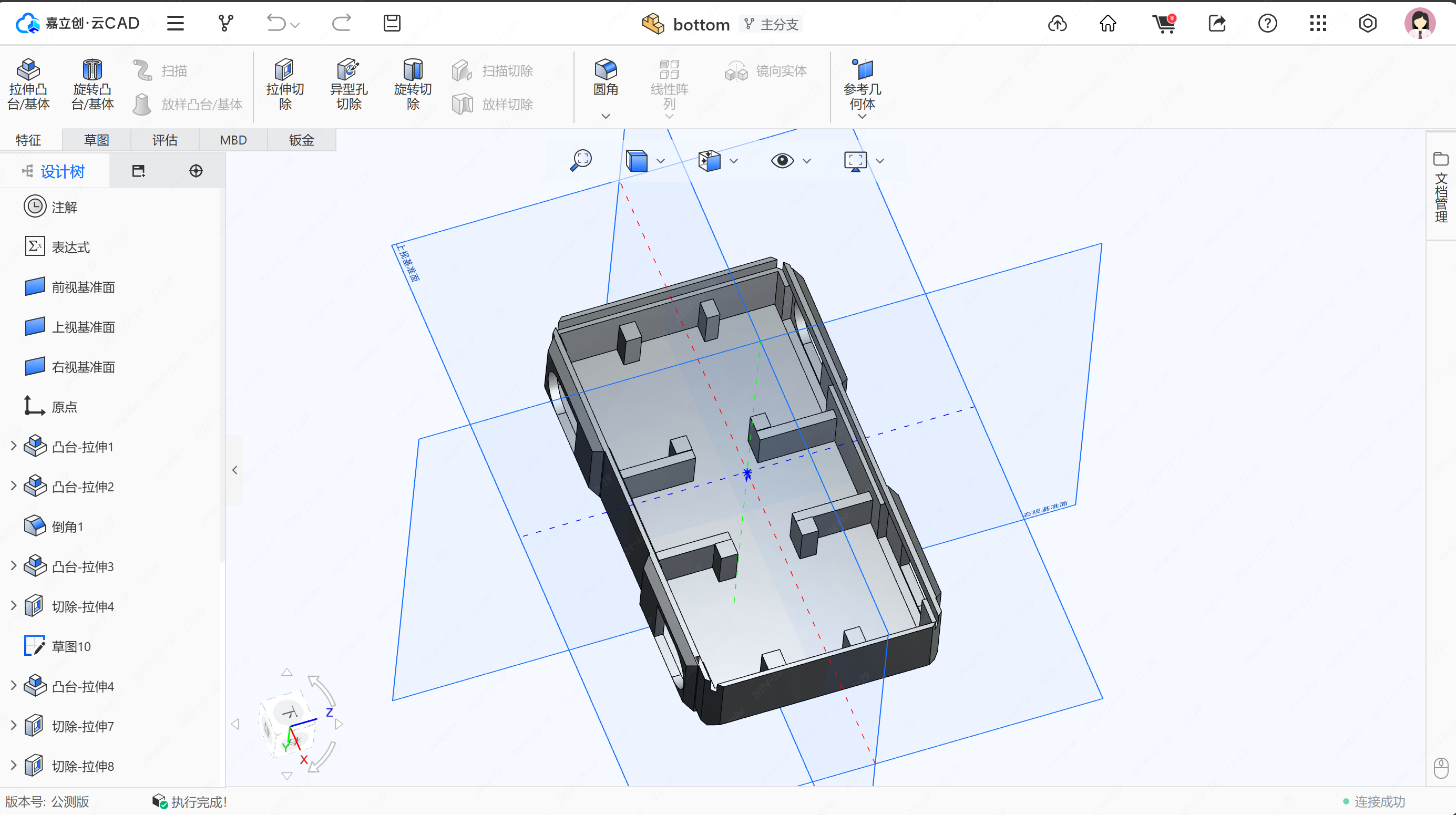
- 底壳部分为舵机设计了4个限位槽,盖上主体壳后PCB会将舵机压住,所以没有设计螺丝孔,可以正常使用。
脚
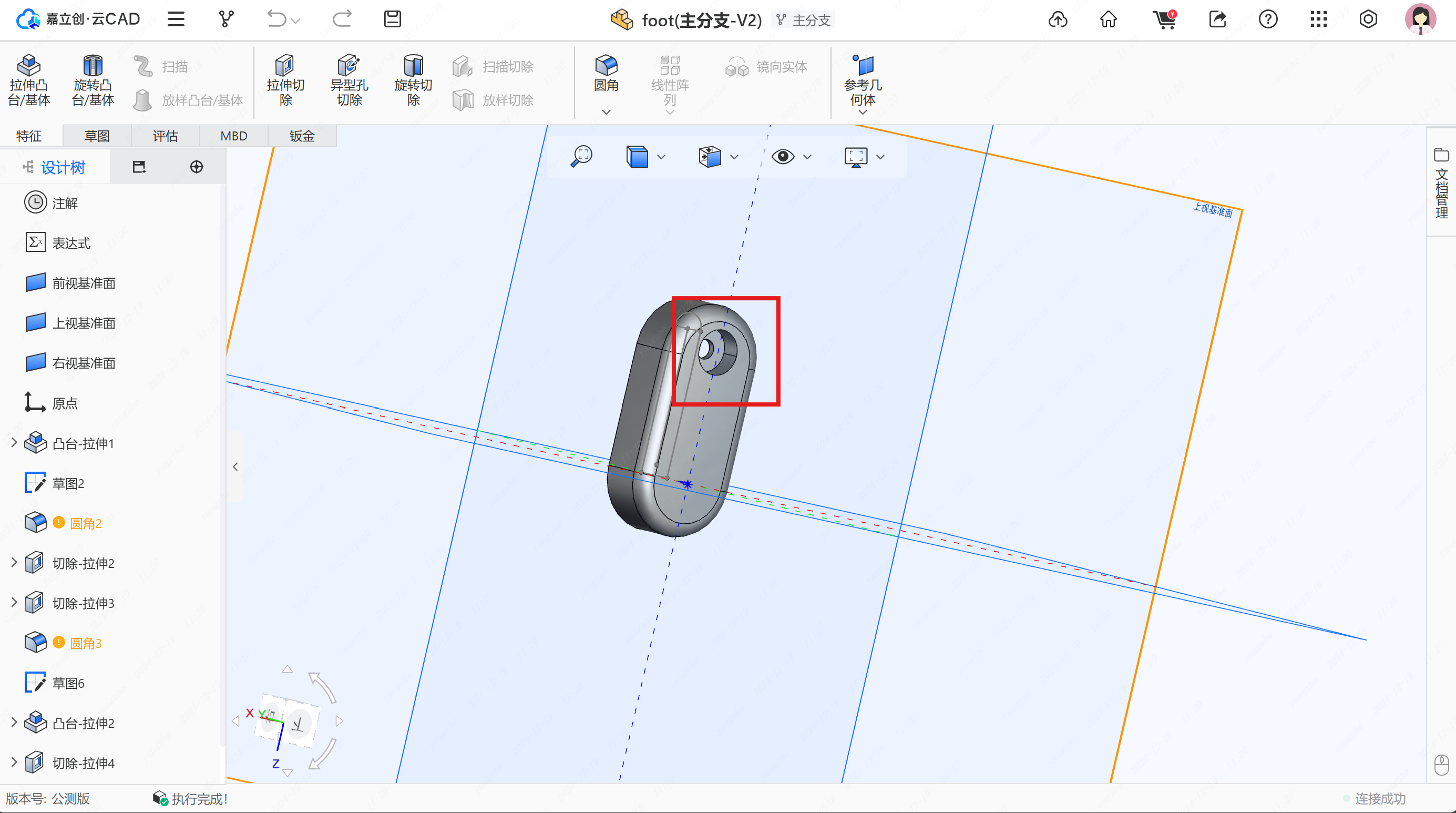
- 红框部分是螺丝卡槽,可以直接使用舵机附带的两颗大头螺丝任意一颗
组装
组装较为简单,分为上中下三层
PCB
下层为舵机空间,摆放四个舵机,通过限位槽限位。
中间层

中间层是电路板空间,通过上壳内的限位槽将PCB固定在中间,并压住底部电机。


注意事项
- 推荐使用180度舵机,自带限位器,无需校准
- V1.3外壳适配光固化打印,固定PCB螺丝M2x2,固定外壳螺丝M1.4x3
- OLED显示屏为0.96寸SSD1306或SSD1315驱动
- 电池为2节14500锂电池,单节电压3.7-4.2v, 电池盒为2节串联14500电池盒
- 预留开关和外部充电接口,外部充电模块应当为2串锂电池充电模块,满电电压8.1-8.4V,均衡接口需飞线连接到两节电池中间。
- 切勿强行掰动舵机,避免电机损坏,也可购买金属齿轮的MG90舵机
- 14500单节电池容量建议达到1000mAh-1200mAh左右,确保放电能力达到1C,最高输出电流最好达到1200mA,以达到所需电流值
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论