


描述
项目说明
足轮机器人,项目灵感来源为Ascento机器人,有低成本、高性价比,拥有的功能比如自平衡、上下台阶、跳跃等显著性能,在这个项目也都一一实现。
开源协议
本项目使用CC-BY-NC-SA 3.0开源协议,即知识共享许可协议-署名-非商业使用-相同方式共享。
CC:知识共享许可协议
BY:署名,您必须给出适当的署名,提供指向本许可协议的链接,同时标明是否(对原始作品)作了修改。
SA:相同方式共享,如果您再混合、转换或者基于本作品进行创作,您必须基于与原先许可协议相同的许可协议分享发布您贡献的作品。
NC:非商业使用,您不得将本作品用于商业目的。
项目相关功能
自平衡功能、快速移动、机动转向、弹跳越障、侧身倾斜、高度调节、高低腿、wifi遥控、ps4手柄蓝牙无线遥控、无线调参、参数回传与显示等功能
项目属性
本项目为首次公开,为本人原创项目。项目未曾在别的比赛中获奖。
项目进度
1.主控板硬件原理图设计与PCB设计检查完成。
预留接口:mpu6050接口、oled接口、预留串口、预留io,为了提高系统的完成率,给一些电路设计预留接口,可以在原电路设计出现问题的时候,作为替代接口。

2.主控板已打样回来,经过调试硬件各功能,基本达到预计功能,其中硬件调试如下:
1)esp32 usb 的D+和D-接反了,将其调换后功能正常
2)mup6050 的IIC未接上拉电阻,接上上拉电阻后功能正常
3.结构设计已完成,接下来准备打样。

4.硬件进行改进,改进内容如下
修改记录:3.0
1.esp32 usb 的D+和D-接反了,已修改
2.mup6050 的IIC未接上拉电阻,已修改
3.从其他地方来的3.3v很不稳定,3.3v需要从线路板上降压而来,将7.2v接到5v上,取消5v电压,7.2v给到转3.3v稳压芯片上,,已修改
4.舵机pwm 需要接上拉电阻,否则在复位的时候,舵机由于低电平会突然回零位一下,已修改
5.D2_LED 网络标号错误,应该是D23_LED,已修改
6.foc电机来的5v电压,电流不够,所以取消5v网络标号,将7.2v接到5v上,取消5v电压,7.2v给到转3.3v稳压芯片上,已完成
8.取消usb ID引脚配置,已修改
9.取消备用接口,已修改
10.取消7.2V的使能控制ENA,已修改
11.取消usb1的三个静电放电(ESD)保护器件 已完成
12.CN1的U6_TX、U6_RX标错成了U2_TX、U2_RX
13.接口各管脚尽量都要标准丝印,或者标注接口连接方向

5.结构进行了进一步改进:
1)加强了腿部件的结构强度
2)对电池的位置可调,从而能够改变零位

设计原理
硬件设计如下:
供电采用三节18650,可提供12V电压、3000mAh的容量。12V可以直接给foc电机供电,foc电机输出5v在给主控板供电,从而节省12转5v供电电路。 采用12v转7.2vDC/DC芯片TPS5450DDAR最大5A的电流给舵机供电。
主控芯片采用stm32f407,esp32为其提供无线遥控功能,可以使用wifi控制、调参,可以使用PS4手柄连接其蓝牙进行遥控。不直接使用esp32作为主控的原因是其编译和烧写速度太慢,难以忍受。
使用stm32既可以使用jlink烧写,即使使用arduino框架,在vs code的platformio平台下stm32的编译速度也是足够快的。
IMU:使用mpu6050通过iic和stm32通讯
OLED:使用0.91寸oled屏通过iic和stm32通讯
EEPROM:使用AT24C04通过iic和stm32通讯
foc电机接口:foc电机采用的是simplefoc 2805电机作为轮子动力,foc电机可以极大的提升机器人的平衡能力
舵机接口:使用20kg舵机作为腿部动力,大动力舵机拟实现改变重心、左右平衡和弹跳。
烧写调试接口:stm32的swd接口和一路调试串口
电量检测:一路stm32的ADC通道
Micro USB 5V&USB-UART:esp32烧写调试电路
5V to 3.3V:stm32、esp32、mpu6050等芯片供电
电路中有多路5v供电,为保护电路使用BAT760-7二极管。
结构设计如下:
1)控制重量是减重
2)实现腿部的圆周转线性运动
软件说明
本项目使用VSCode+PlatformIO开发,使用arduino库+FreeRTOS操作系统创建多任务管理各部分功能
1.stm32主控功能:对于中心随腿部运动而变化的车体,其平衡及前进转向控制采用多个LQR控制器,LQR控制器可以极大的提升机器人的平衡能力以及控制效果
2.esp32无线功能:无线功能可以使用轮趣科技手机app通过wifi进行调参和遥控,也可通过ps4手柄通过蓝牙进行遥控
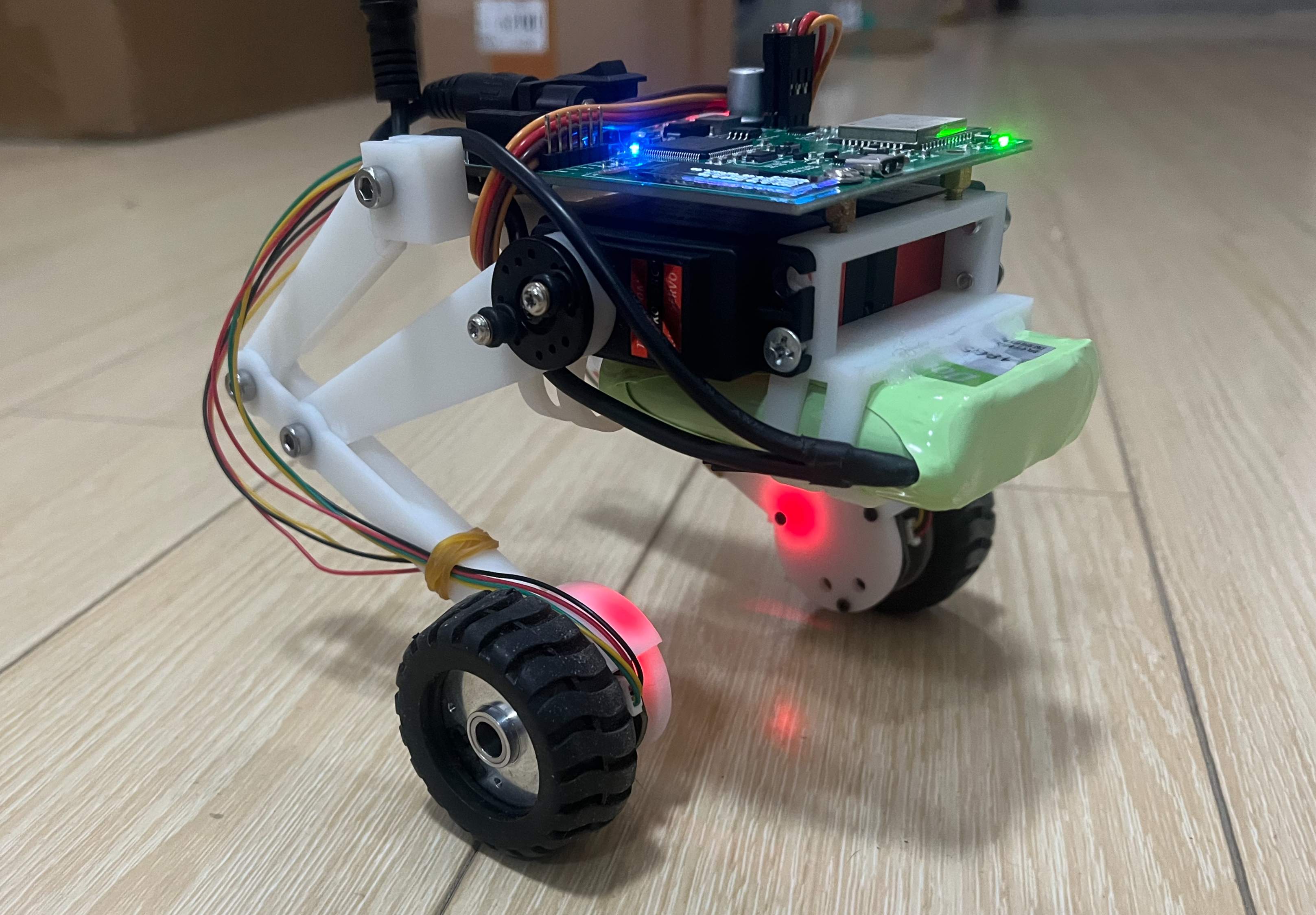
实物展示
主控板

足轮机器人


设计注意事项
ps4手柄在项目调试使用期间不可链接ps4或手机等其他设备,否则会导致ps4手柄在无法连接esp32,除非更换新的esp32芯片(原因不明)。
其他
本项目中的主控程序和无线程序源码、结构模型文件、及3D打印文件已全部开源在附件中,皆为最终版本。
项目中是的手机调试遥控app:链接:https://pan.baidu.com/s/1gNYY2oHdPqBM7ljvdAj2Vw 提取码:xjh6
项目核心技术点在于FOC电机和LQR算法。
目前已实现并在演示视频中展现大部分功能,跳跃能力会在后续进行调试。
其他演示视频及资料:https://www.bilibili.com/video/BV19w411r7s1/?vd_source=b308842dab6371bccb1b4b5030895bf6(见个人主页)
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









