

无刷轮足平衡车控制板
简介
基于世博同学的可爱小轮足的升级电路,降本增笑了哈哈
简介:基于世博同学的可爱小轮足的升级电路,降本增笑了哈哈开源协议
:MIT License
描述
## 重生之我在嘉立创做轮足平衡步兵
——————————————————————分割线———————————————————————
2026.1.17更新:
Up鸽了一年,不是在摸鱼,是去造孩子去了。今天更新下大家反应的问题内容,把板子更新了一个小版本,改动不算大,之前的旧版板子改改就能用。
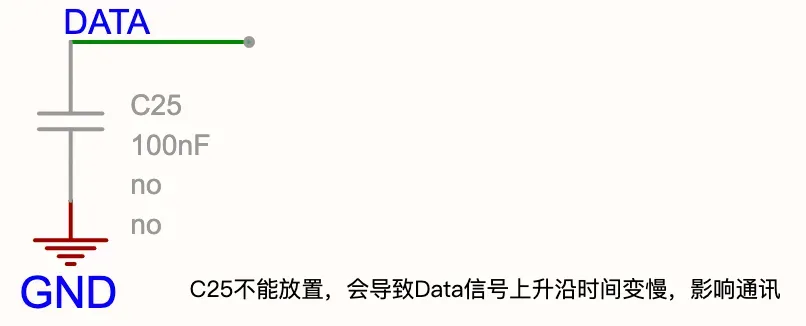
1. 舵机通讯失败问题。
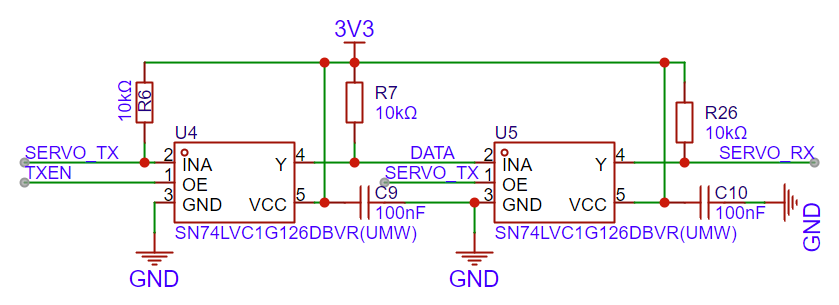
有童鞋反应舵机无法通讯,测试发现是C25电容导致。Data信号是靠3.3V上拉10K电阻控制,加了100nf电容之后上升沿严重拉长,导致通讯失败,去掉即可。
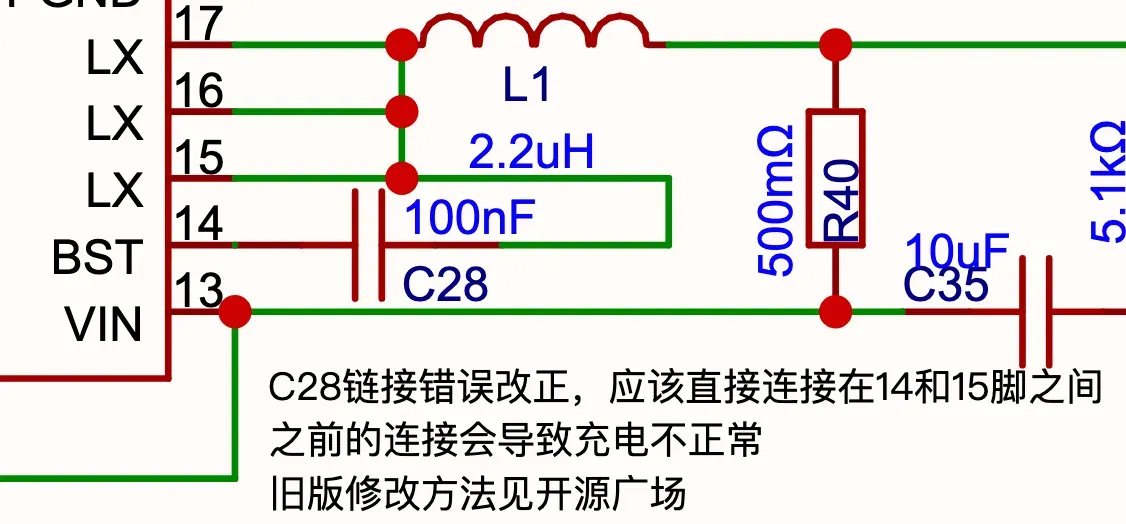
2. 电池充电异常。
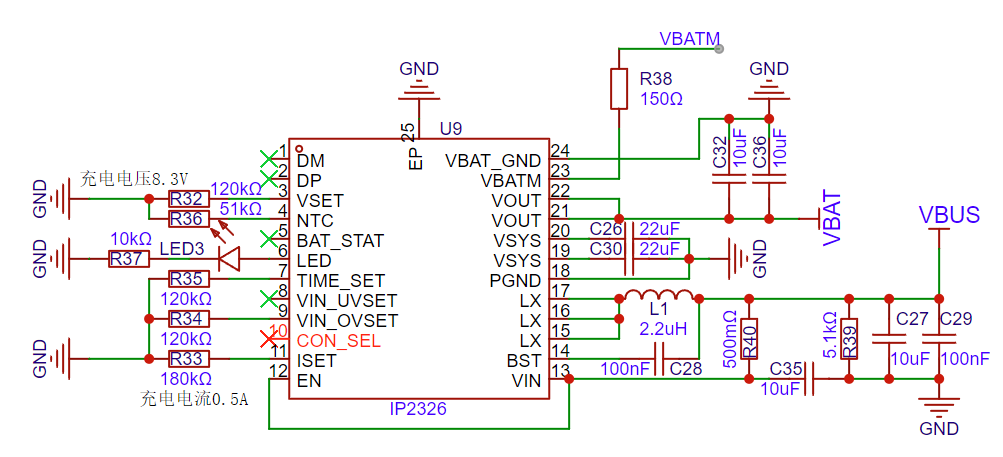
我的锅,原理图设计的时候Boost电容连错脚了,C28改正连接到14和15脚之间即可。
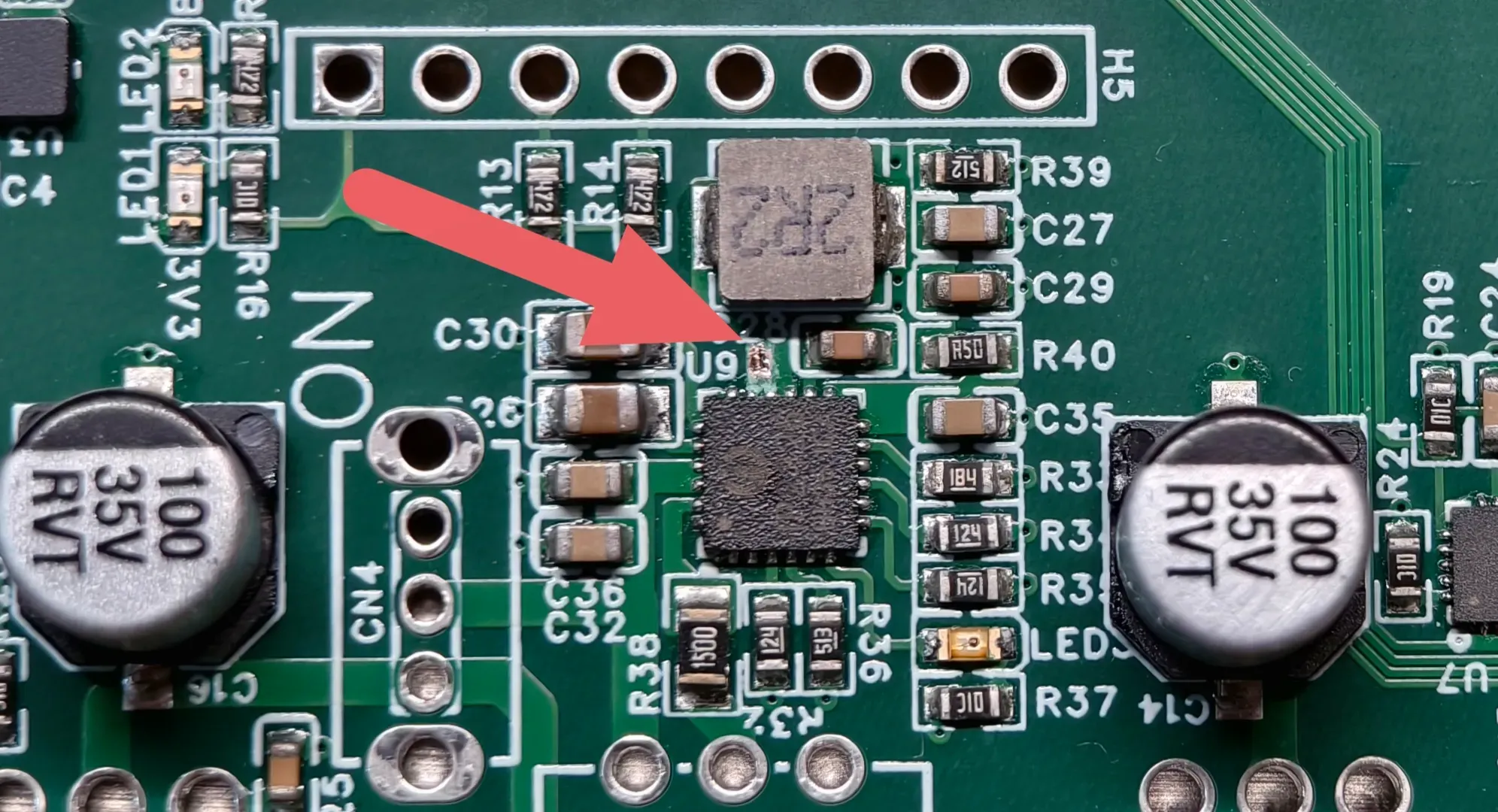
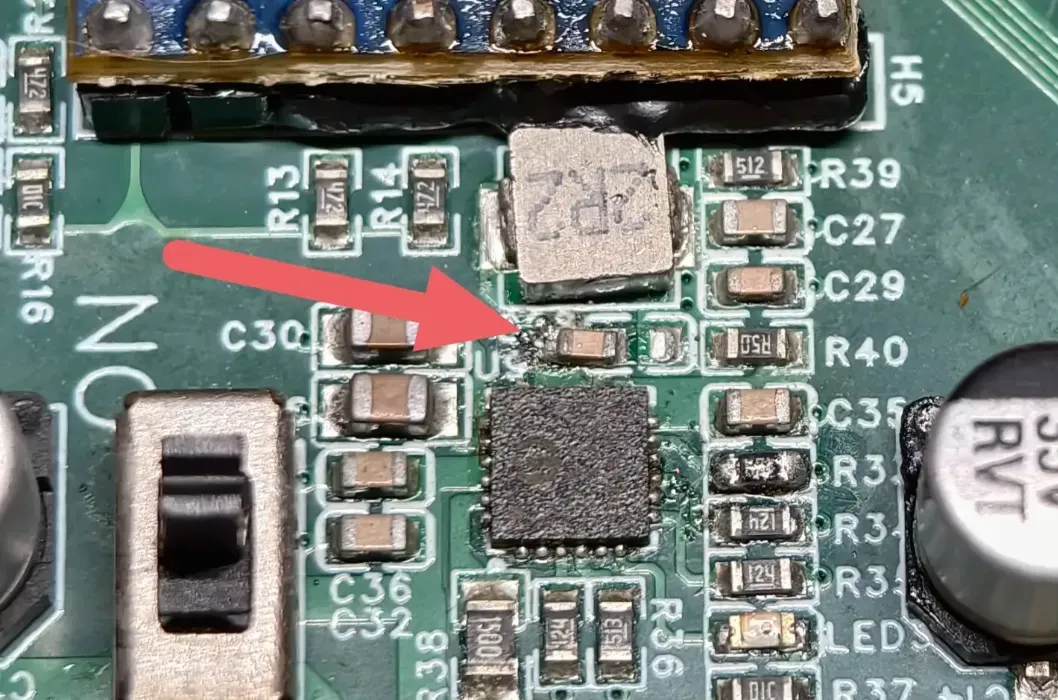
旧版本的板子也很好改,如下图,U9丝印旁边的绿漆用小刀或者尖头镊子刮开露出铜导线(这根铜皮是电源线比较粗很好刮),然后把旁边的100nf电容C28热风枪吹下来放到你刮的焊盘和原来14脚连接的那左半边的电容焊盘上(记得铜皮提前放点锡浆)。
3. I2C接口问题
MPU6050模块的I2C接口原本世博同学接的是I2C1,即代码中为mpu6050(I2Ctwo),我的实际电路接到I2C0上了,所以只需要改动一行如下:
MPU6050 mpu6050(I2Cone); // 修改:根据 I2C 扫描结果,MPU6050 实际连接在 I2C Bus 0 上然后直接编译就好了。
其他一些细节的更新可以直接看原理图工程,我都更新在里面了。
还有其他问题的话直接给我留言,我都会看的。祝大家玩的愉快!
———————————————————————————分割线—————————————————————————
前一段时间世博同学开源了他的轮足机器人方案(https://www.bilibili.com/video/BV174421S78Y/?spm_id_from=333.337.search-card.all.click&vd_source=d667d9fc4eabd58bc95e99c36c607c63),可可爱爱没有脑袋甚是喜爱,不由得想要自己孵化一个出来。
但是在看过具体的电路设计之后发现,有好多个芯片又贵又难买(指正品),而且也没有电池管理电路,每次电池用完还要拔下来用专门的2s充电器充电。本Daddy见不得自己孵出来的宝贝有这么多不完美,于是乎开始动手改造。
首先有几个要求是肯定要满足的:
1. 兼容世博同学的代码
2. 添加BMS电路,能够直接通过usb端口给电池充电,告别反复拆卸电池。
3. 替换不好买的芯片如电机驱动,使用国产低成本方案。
4. 简化电源电路,去除不使用的端口。
5. 所有芯片能用国产的全换成国产的,胸前的红领巾愈发的鲜艳起来了呢。
以上几点都比较好解决。使用英集芯的IP2326作为BMS管理芯片,解决2s电池包充放电问题。电机驱动芯片则使用了国产率能得SS6343,嘉立创可以直接SMT,最重要得是价格便宜好买。其他则修改了CH340C为CH340X,直接连接ESP32下载,省了两个三极管。
另外,舵机电路那里世博同学使用了舵机官方手册的建议电路,我自己没看清楚,以为两个芯片全用的SN74LVC1G126,结果调了几天一直连不上舵机。最后看了好几遍才发现是不一样的芯片,要被自己气死。。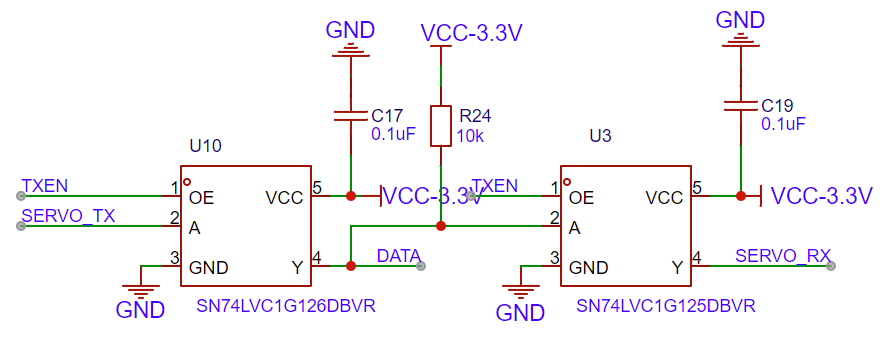
这个电路我改成了全部使用SN74LVC1G126的方案,已验证可用,省的买两种芯片,避免贴错。项目里的舵机调试板V1.2就是这个部分的单独模块,用来设置舵机的零点位置等。不想自己做的也可以买官方的调试板,只是官方的板子用的Micro USB接口,在2024年就显得太不优雅了。男人,要时刻保持优雅!
BMS电路,充电限流500mA,避免芯片过热。充电电压根据自己需要选择电阻。
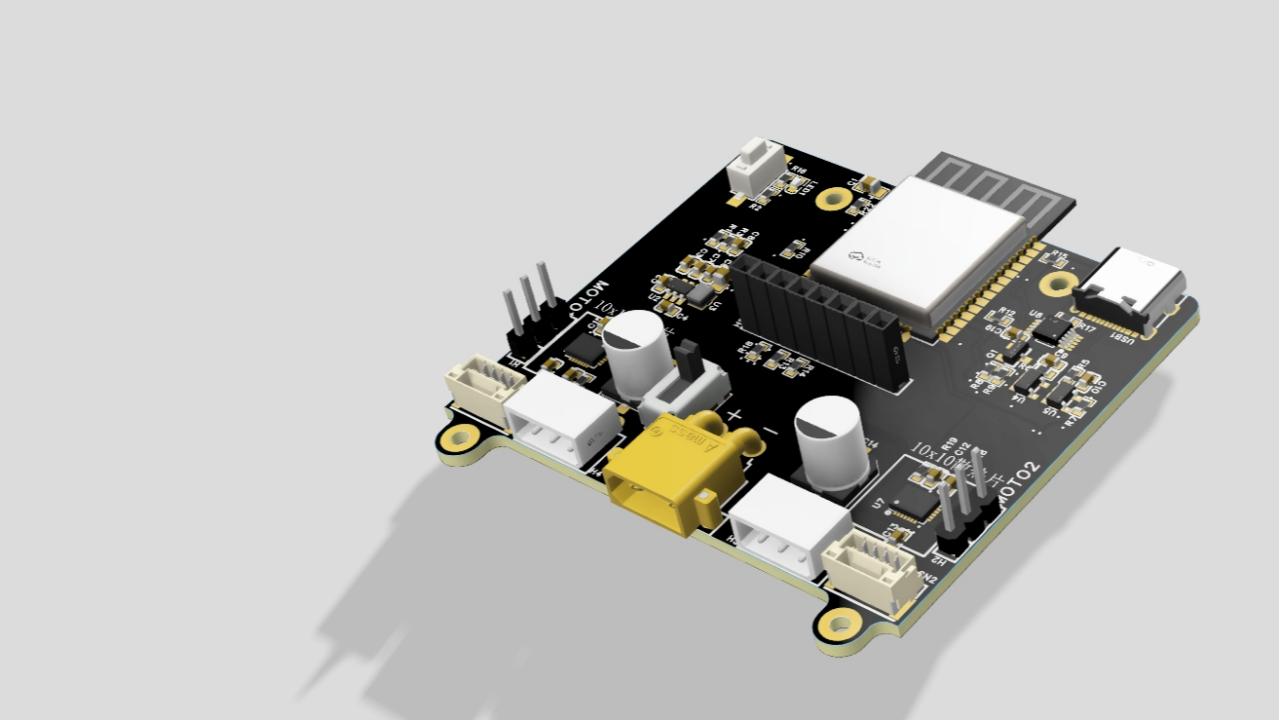
电路板顺手渲染一下,不过电池连接器还是旧设计,看看就行。
顺便把平衡小车也来了一张

实物我暂时用嘉立创便宜的树脂打印了一套,打算验证好没问题后再用贵的尼龙打印。
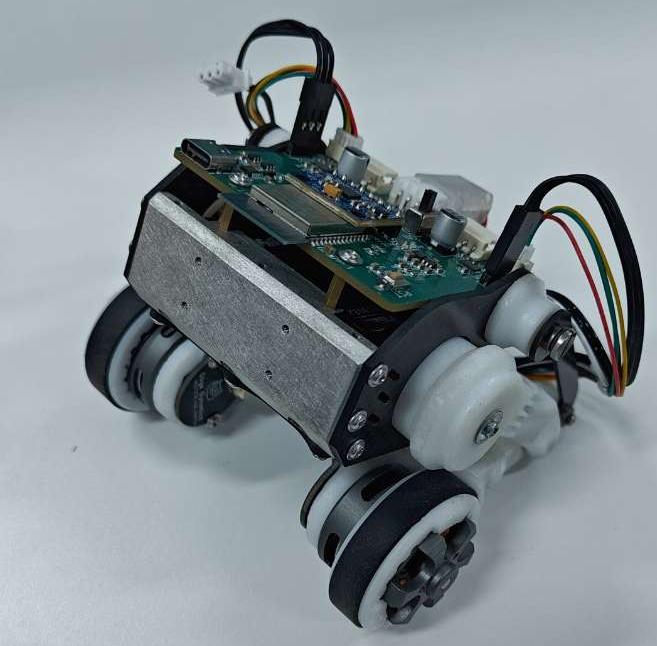
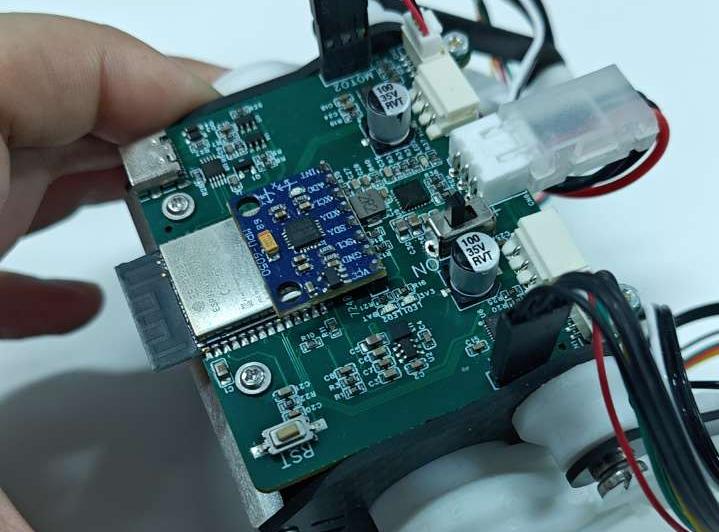
装上陀螺仪的样子,我是直接焊死的,避免抖动影响。电池也是用的原来自带的充电口连接器,既能充电也能放电。USB口充电权限高于电源开关。
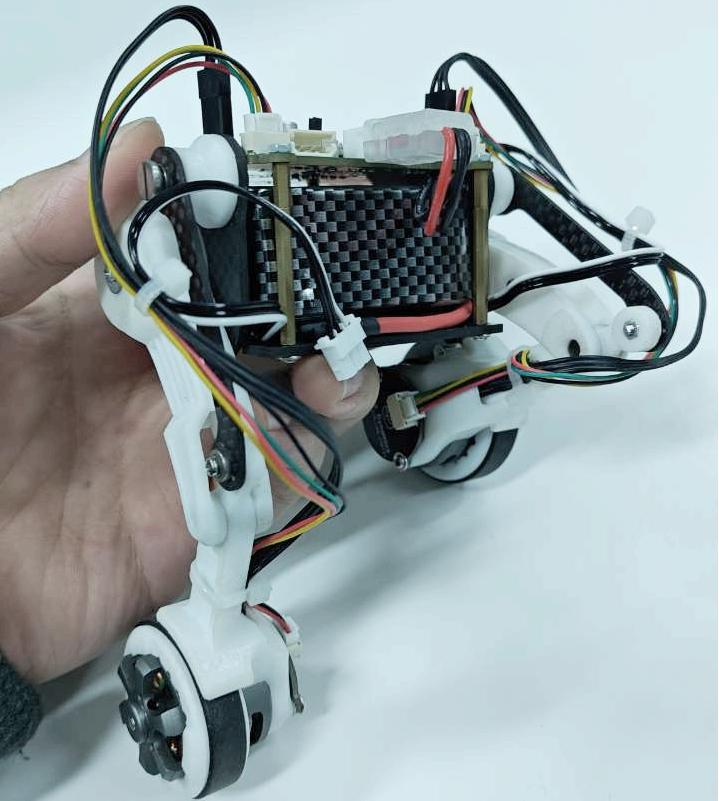
背面电池包的样子。这里原来世博同学给的连接的尺寸有点问题,实际上应该买再细一点的电池包,不然你必须把主控板垫高8mm左右才能装下电池包。
最后,为了方便小白打样,我原理图里的元器件全都尽量使用的嘉立创的SMT库,这样能省不少换料费用。直接用开源的电路去嘉立创打样smt的话,算下来5片500RMB多一点(不含所有插件和ESP32,插件就几个排针和连接器,esp32要贴的话就不能使用便宜的贴片方案了),相对原版打样快1000块大洋来说已经非常划算了。
哦对了,还有轮部电机屁股上的编码器板子,我也放在共享的工程里了,就一个编码器芯片和连接器,随便焊~
目前正在调试PID,调的有点头疼。。有经验的同学可以分享下参数。。软件部分,可以直接去世博同学开源的地址(https://github.com/MuShibo/Micro-Wheeled_leg-Robot)下载,我过几天也会把自己基于platformIO平台的工程文件附上来(已附上,里面分了好多个测试模块代码,可以自己改文件后缀名来编译测试),以方便用platformIO的童鞋改动和测试~
-------------------------------------------------------------------------------------------------------------------------------
记得点赞!
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论