

开源协议
:GPL 3.0
描述
1. 设计背景
在现代工业自动化与智能制造领域,电机作为动力核心部件,其调速控制的精准性、稳定性对设备运行效能与生产质量起着关键作用。PID 控制(比例 - 积分 - 微分控制)凭借原理简洁、适应性强、鲁棒性良好等优势,成为电机调速控制中应用最为广泛的技术之一。本次以电机调速为实践场景,开展 PID 控制技术的学习与实践,深入探究其原理、实现与优化,旨在掌握经典控制理论的工程应用方法,为后续复杂系统控制奠定基础。本报告将围绕学习过程、实践成果、技术思考等维度展开,系统总结 PID 控制电机调速的学习实践收获。
2.电路介绍
2.1、电源模块
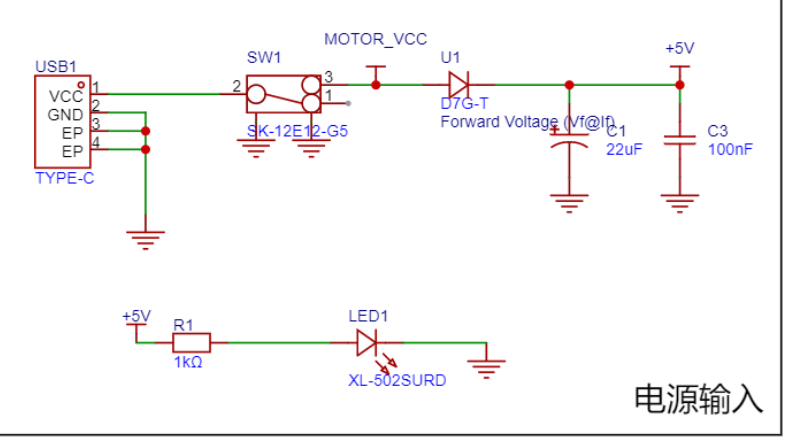
1. 功能与作用
2. 典型电路组成
降压电路:若采用 220V 交流供电,通过变压器(或开关电源模块)降压,再经整流桥(如桥堆)将交流电转为脉动直流电,搭配电容滤波(大容量电解电容 + 小容量陶瓷电容),输出稳定低压直流(如 24V、12V ),给电机驱动模块供电。
稳压电路:从 24V/12V 中再降压稳压,输出 5V、3.3V 等,供控制器(STM32 最小系统板常用 3.3V )、传感器(光电编码器可能需 5V )使用。比如用 LM2596 降压模块输出 5V,或 L7805 线性稳压器(适合小电流、低成本场景),配合电容进一步滤除纹波。
3. 关键要点
功率匹配:需计算系统总功耗(控制器、驱动、传感器等耗电之和),选择功率足够的电源,避免带载能力不足导致电压跌落。
抗干扰设计:在电源输入、输出端增加二极管、电容,减少外界干扰窜入系统,保障控制电路稳定。
2.2、控制器模块(MSPM0G3507)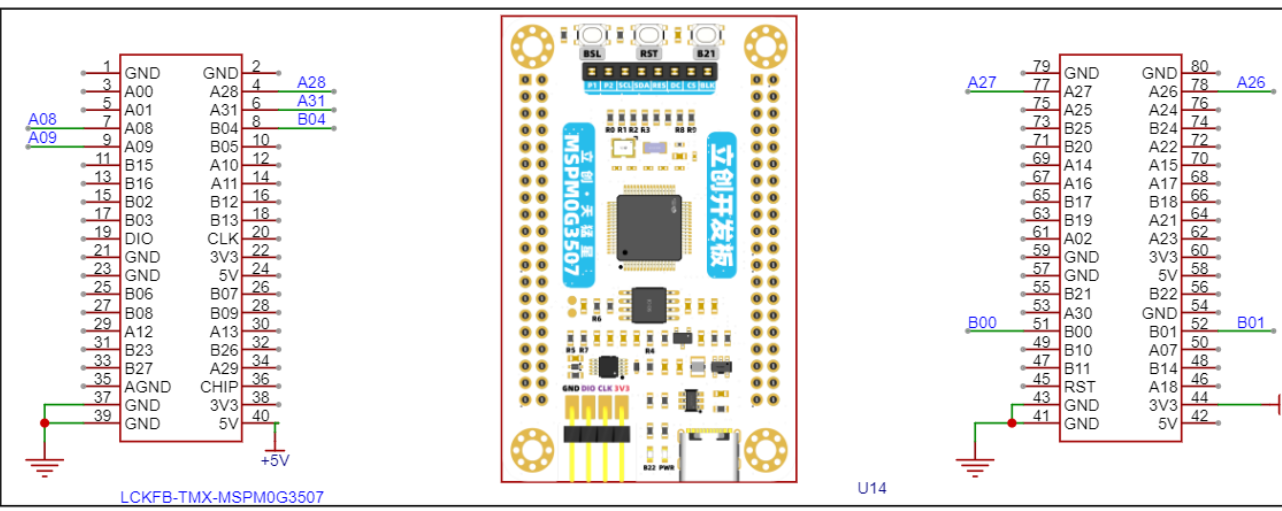

1. 功能与作用
采集转速反馈信号(编码器脉冲);
根据设定转速与反馈转速计算偏差,执行 PID 运算;
输出 PWM 控制信号,调节电机转速;
通过串口、显示屏等实现参数调试、状态显示。
3. 关键要点
引脚复用与配置:需熟练配置 定时器、GPIO 模式,确保编码器捕获、PWM 输出功能正常;若涉及多任务(如同时处理通信、控制),合理使用中断、DMA 提升效率。
电磁兼容性(EMC):在控制器 PCB 布局时,模拟地(如传感器输入)与数字地(芯片逻辑)分开铺铜,通过 0Ω 电阻单点连接,减少数字噪声干扰模拟信号采集。
2.3、电机驱动模块BDR6126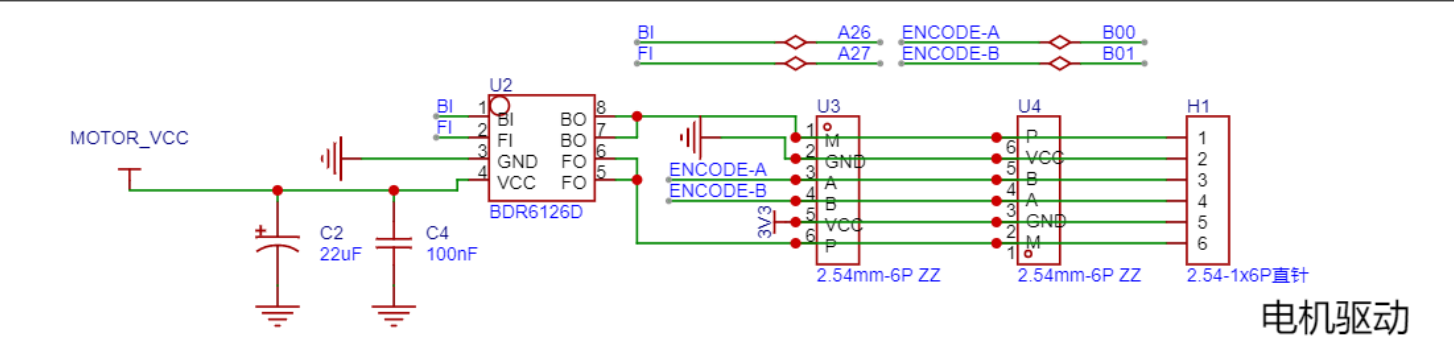

效率更高(发热少)、集成度更高(内置保护),但耐压范围更低,适合中小功率、高频 PWM 控制的电机(如 12V 直流减速电机)。
该电路围绕 BDR6126D(U2)构建电机驱动系统,MOTOR_VCC 为电路提供电源,经 C2(22μF)、C4(100nF)滤波后,为 BDR6126D 供电,其 BI、FI 引脚接收控制信号,BO、FO 引脚输出驱动信号;编码器信号 ENCODE - A、ENCODE - B 经 U3、U4(2.54mm - 6P ZZ)转接,通过 H1(2.54 - 1x6P 直针)与电机驱动关联,实现电机转速反馈与控制,保障电机按设定运行并反馈状态 。
2.4按键模块
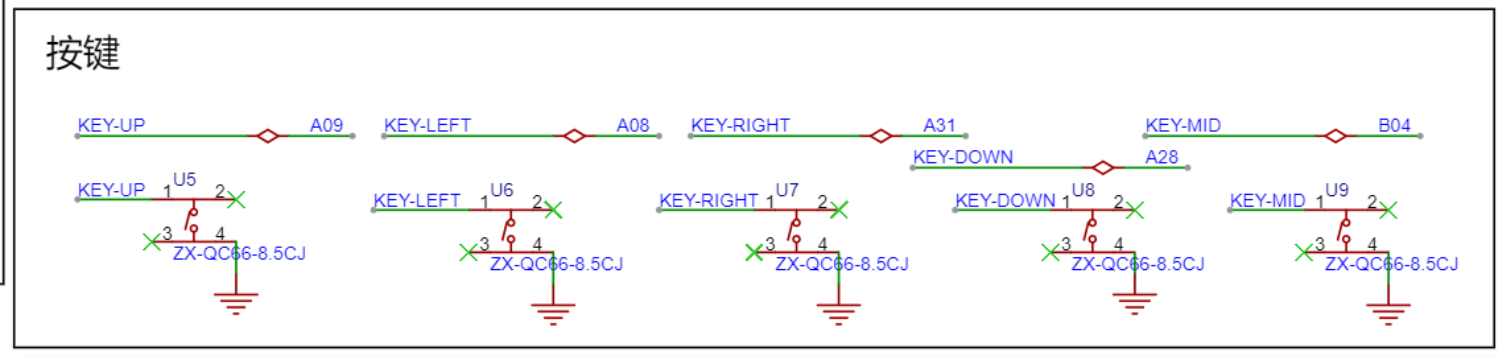
该电路为按键输入模块,设有 KEY - UP、KEY - LEFT、KEY - RIGHT、KEY - DOWN、KEY - MID 共 5 个独立按键(U5 - U9 均为 ZX - QC66 - 8.5CJ 型号 ),每个按键一端经对应标识线(如 KEY - UP 连 A09 等 )接控制器引脚,另一端接地;按键按下时,对应引脚电平会变化,可实现向上、向左、向右、向下、中间确认等输入功能,为系统提供人机交互的按键操作接口 。
3.软件设计
3.1pid介绍
- 比例(P):直接放大当前偏差,加快响应速度,但过大易导致超调、振荡;
- 积分(I):累积历史偏差,消除稳态误差,但可能引发积分饱和(响应滞后);
- 微分(D):预测偏差变化趋势,抑制超调、增强稳定性,但对噪声敏感。
3.2.PID代码介绍
电机 PID 调速控制系统,通过光电编码器获取速度反馈,利用增量式 PID 算法计算 PWM 输出,驱动 BDR6126 芯片控制电机正反转。系统包含速度 PID 初始化(Kp=35、Ki=6、Kd=10)、参数动态调整(支持 ±0.1 步进调节)、方向控制及限幅保护(PWM 范围 ±MOTOR_PWM_MAX),采用 80000*5 个系统时钟周期的延时控制刷新频率,实现电机转速的精准闭环控制。
4.总结
一、项目概述
二、硬件设计回顾
(一)电源输入电路
(二)按键输入电路
(三)电机驱动电路
三、软件算法实现
(一)PID 控制算法基础
(二)代码中的 PID 实现
- 数据结构与初始化:定义
PID结构体存储参数,speed_pid_init函数完成初始化,设置kp、ki、kd等初始值,为 PID 运算奠定基础 。 - 控制逻辑:
motor_speed_control函数为核心控制逻辑,获取目标转速与实际转速(编码器反馈),经pid_calc计算得到 PWM 控制量,根据正负控制电机正反转,实现转速调节。同时,通过延时控制刷新速度,保障系统稳定运行 。 - 参数调整:
set_speed_pid_parameter函数支持对 PID 参数(P、I、D)及目标值的动态调整,按需求进行加减操作,且对参数下限做保护处理,方便调试优化控制效果 。
四、项目成果与不足
(一)成果
(二)不足
- 参数自适应性:当前 PID 参数依赖手动调试,缺乏自适应性,面对复杂工况(如负载突变、环境变化),控制效果易受影响,需引入智能算法(如模糊 PID )优化 。
- 抗干扰能力:虽有基本滤波措施,但复杂环境下(如强电磁干扰),编码器信号、控制信号仍可能受干扰,导致转速波动,需强化滤波电路与信号调理设计 。
- 系统集成度:硬件模块相对分散,可考虑集成化设计,缩小体积、降低功耗,提升系统可靠性与实用性 。
五、未来改进方向
- 智能 PID 优化:研究模糊 PID、自适应 PID 等算法,结合工况实时调整参数,提升系统对复杂场景的适应能力 。
- 抗干扰强化:优化电路布局,增加电磁屏蔽措施,改进信号滤波算法,降低干扰对系统的影响,保障转速控制精度 。
- 功能拓展与集成:拓展系统功能,如增加多电机协同控制、远程通信调速等;推进硬件集成化设计,开发专用控制板,提升系统整体性能与实用性 。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









